
Trajectory tracking control of Autonomous Marine Vessel using Neuro-Adaptive Sliding Mode Contro
Keywords:
marine vessel, linear algebra, adaptive control, Artificial Neural NetworksAbstract
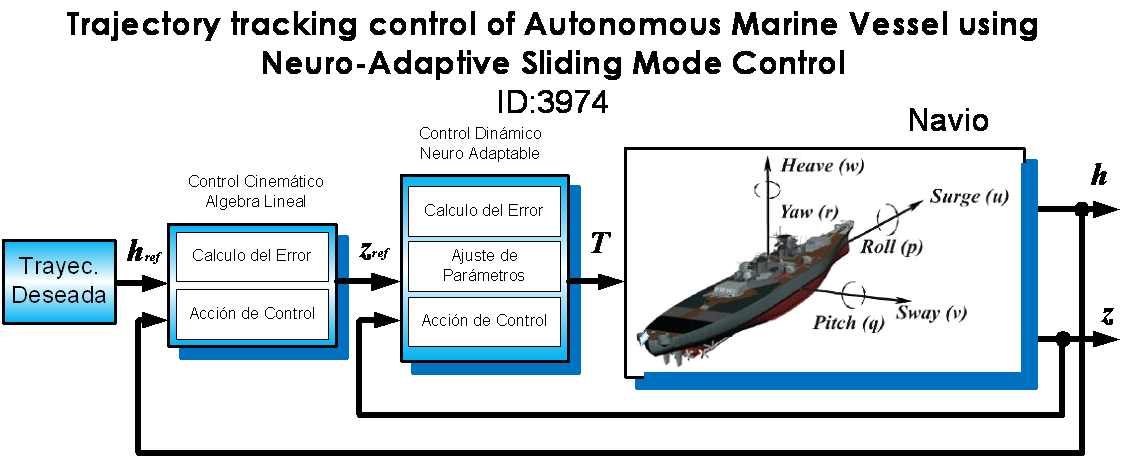
This research paper presents the design of a control technique based on the combination of Linear Algebra (LABC) with Neuro Adaptive Sliding Mode Control (NN-SMC) applied to the control of a marine vessel. Where the linear Algebra technique controls the kinematics of the Vessel and the NN-SMC controls its dynamics. Where the adaptive capacity of the neural networks learns the vessel dynamics, including the non modeled dynamics. The simulation results show satisfactory results especially when disturbances are acting on its dynamics. Finally, the convergence of the proposed technique was demonstrated using Lyapunov’s theory.
Downloads
Download data is not yet available.
Downloads
Published
2021-06-07
How to Cite
Rossomando, F., Serrano, E., & Scaglia, G. (2021). Trajectory tracking control of Autonomous Marine Vessel using Neuro-Adaptive Sliding Mode Contro. IEEE Latin America Transactions, 19(5), 763–771. Retrieved from https://latamt.ieeer9.org/index.php/transactions/article/view/3974
Issue
Section
Articles
