Application of optimization techniques for generating trajectories and adjusting the controller gains of a hydraulic servo-positioner using the Firefly metaheuristic algorithm
Keywords:
Firefly Metaheuristic Algorithm, Cascade Control, Hydraulic Servo Positioner, Optimization, Trajectory PlanningAbstract
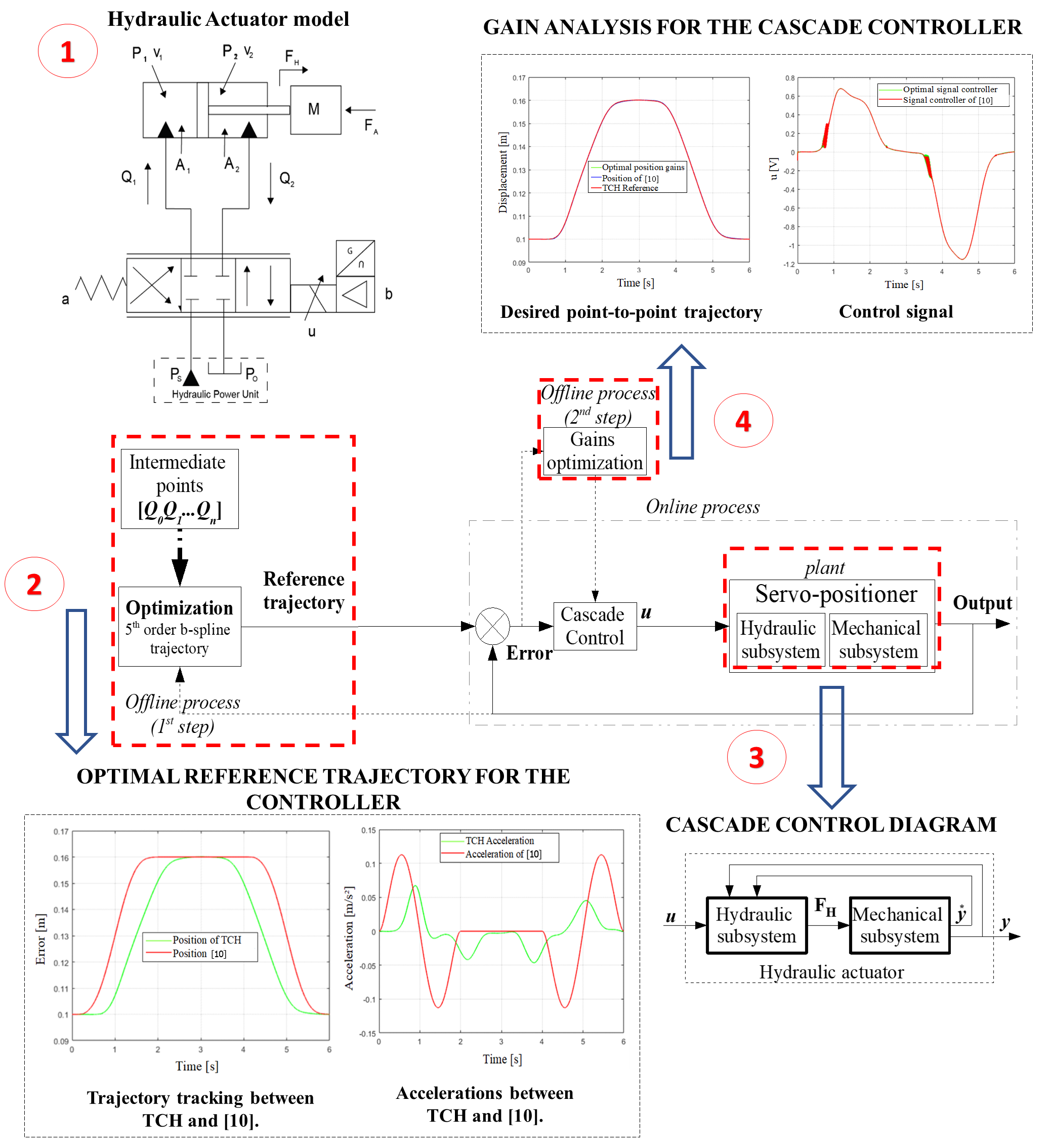
This work evaluates the influence of the reference trajectory on the tracking error in a servo-positioner control system. Thus, the objective is to improve the ideal tuning of the gains of a controller applied to the tracking of the positional trajectory of a hydraulic actuator through the physical characteristics of the plant and the trajectory. The applied controller uses a cascade strategy and consists of dividing the mathematical model into two interconnected subsystems, one hydraulic and the other mechanical, applying specific control strategies to each subsystem. The proposed methodology is implemented using the Firefly Metaheuristic Algorithm (FMA). The first stage consists of generating the 5th order optimal trajectories by means of b-splines functions, in which they must minimize the acceleration along the actuator's path, considering speed and flow restrictions related to the hydraulic servo-position. The second step consists in determining the effective value of the error during the execution of the trajectory and the respective gains applied to the model. The results show that this strategy proved to be useful for obtaining adequate trajectories and gains in plants with significant non-linearities, because the trajectory error was 27% lower than the empirical adjustment method of gains compared in this study.
Downloads
References
Q. Guo, Y. Zhang, B. G. Celler, and S. W. Su, “Backstepping Control of Electro-Hydraulic System Based on Extended-State-Observer With Plant Dynamics Largely Unknown,” IEEE Transactions on Industrial Electronics, vol. 63, no. 11, pp. 6909–6920, Nov. 2016, doi: 10.1109/TIE.2016.2585080.
F. A. P. Borges, E. A. Perondi, M. A. B. Cunha, and M. R. Sobczyk, “A Hybrid Feedback Linearization and Neural Network Control Algorithm Applied to a Hydraulic Actuator,” presented at the 9th FPNI Ph.D. Symposium on Fluid Power, Nov. 2016. doi: 10.1115/FPNI2016-1562.
H. A. Mintsa, R. Venugopal, J. P. Kenne, and C. Belleau, “Feedback Linearization-Based Position Control of an Electrohydraulic Servo System With Supply Pressure Uncertainty,” IEEE Transactions on Control Systems Technology, vol. 20, no. 4, pp. 1092–1099, Jul. 2012, doi: 10.1109/TCST.2011.2158101.
S. Koziel and X.-S. Yang, Computational Optimization, Methods and Algorithms. Springer Science & Business Media, 2011.
R. Prabel and H. Aschemann, “Nonlinear adaptive backstepping control of two coupled hydraulic servo cylinders,” in 2014 American Control Conference, Jun. 2014, pp. 1310–1315. doi: 10.1109/ACC.2014.6858681.
L. dos S. Coelho and M. A. B. Cunha, “Adaptive Cascade Control of a Hydraulic Actuator with an Adaptive Dead-zone Compensation and Optimization Based on Evolutionary Algorithms,” Expert Syst. Appl., vol. 38, no. 10, pp. 12262–12269, Sep. 2011, doi: 10.1016/j.eswa.2011.04.004.
P. I. I. Pereira, “Análise teórico-experimental de controladores para sistemas hidráulicos,” Universidade Federal de Santa Catarina, 2006, Accessed: Feb. 21, 2016. [Online]. Available: http://www.lume.ufrgs.br/handle/10183/55461
M. R. Sobczyk, E. A. Perondi, and M. A. B. Cunha, “A continuous extension of the LuGre friction model with application to the control of a pneumatic servo positioner,” in 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Dec. 2012, pp. 3544–3550. doi: 10.1109/CDC.2012.6426406.
V. I. Gervini, “Modelagem e controle de um servoposicionador pneumático via redes neurais,” Phd Thesis, Universidade Federal do Rio Grande do Sul, Brazil, 2014. Accessed: Apr. 01, 2016. [Online]. Available: http://www.lume.ufrgs.br/handle/10183/110080
F. A. P. Borges, “Controle em cascata de um atuador hidráulico utilizando redes neurais,” 2017, Accessed: Sep. 29, 2019. [Online]. Available: https://lume.ufrgs.br/handle/10183/165587
A. A. P. Figueroa, J. J. M. Silupu, and R. S. G. Zabaleta, “Adaptive PID controller with auto-tuning applied to the agricultural food industry,” in 2017 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Oct. 2017, pp. 1–7. doi: 10.1109/CHILECON.2017.8229714.
B. B. Ghosh, B. K. Sarkar, and R. Saha, “Realtime performance analysis of different combinations of fuzzy–PID and bias controllers for a two degree of freedom electrohydraulic parallel manipulator,” Robotics and Computer-Integrated Manufacturing, vol. 34, pp. 62–69, Aug. 2015, doi: 10.1016/j.rcim.2014.11.001.
N. Ishak, M. Tajjudin, R. Adnan, H. Ismail, and Y. M. Sam, “Real-time application of self-tuning PID in electro-hydraulic actuator,” in 2011 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Nov. 2011, pp. 364–368. doi: 10.1109/ICCSCE.2011.6190553.
J. Watton, Fundamentals of Fluid Power Control. Cambridge University Press, 2009.
M. A. B. Cunha, R. Guenther, E. R. D. Pieri, and V. J. D. Negri, “Design of Cascade Controllers for a Hydraulic Actuator,” International Journal of Fluid Power, vol. 3, no. 2, pp. 35–46, Jan. 2002, doi: 10.1080/14399776.2002.10781136.
C. L. D. Machado, V. J. de Negri, and M. A. B. Cunha, “Experimental Implementation of the Cascade Controller with Adaptive Dead-Zone Compensation Applied to a Hydraulic Robot,” in 2008 IEEE Latin American Robotic Symposium, Oct. 2008, pp. 59–64. doi: 10.1109/LARS.2008.20.
A. R. Cukla, R. C. Izquierdo, F. A. P. Borges, E. A. Perondi, and F. J. Lorini, “Optimum Cascade Control Tuning of a Hydraulic Actuator Based on Firefly Metaheuristic Algorithm,” IEEE Latin America Transactions, vol. 16, no. 2, pp. 384–390, Feb. 2018, doi: 10.1109/TLA.2018.8327390.
E. A. Perondi, “Controle não-linear em cascata de um servoposicionador pneumático com compensação do atrito,” Phd Thesis, Universidade Federal de Santa Catarina, Brazil, 2002. Accessed: Feb. 21, 2016. [Online]. Available: https://repositorio.ufsc.br/xmlui/handle/123456789/84116
R. A. G. Rendón, A. E. Zuluaga, and E. M. T. Ocampo, Técnicas Metaheurísticas de Optimización, 2nd ed. Colombia: Editorial de la Universidad Tecnológica de Pereira, 2008.
X.-S. Yang, Nature-inspired Metaheuristic Algorithms. Luniver Press, 2010.
L. Lai, “A synchronization position control method based on dynamic particle swarm optimization algorithm in electro-hydraulic servo system,” in IET International Conference on Smart and Sustainable City 2013 (ICSSC 2013), Aug. 2013, pp. 23–26. doi: 10.1049/cp.2013.2031.
M. Elsisi and M. Essa, “Improved bald eagle search algorithm with dimension learning-based hunting for autonomous vehicle including vision dynamics,” Applied Intelligence, Sep. 2022, doi: 10.1007/s10489-022-04059-1.
M. Elsisi, H. G. Zaini, K. Mahmoud, S. Bergies, and S. S. M. Ghoneim, “Improvement of Trajectory Tracking by Robot Manipulator Based on a New Co-Operative Optimization Algorithm,” Mathematics, vol. 9, no. 24, Art. no. 24, Jan. 2021, doi: 10.3390/math9243231.
M. Elsisi, K. Mahmoud, M. Lehtonen, and M. M. F. Darwish, “Effective Nonlinear Model Predictive Control Scheme Tuned by Improved NN for Robotic Manipulators,” IEEE Access, vol. 9, pp. 64278–64290, 2021, doi: 10.1109/ACCESS.2021.3075581.
Guo Lei, “Application of improved PID control technology in hydraulic turbine governing systems,” in 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Apr. 2017, pp. 275–279. doi: 10.1109/ICCAR.2017.7942702.
J. Yao, W. Deng, and Z. Jiao, “Adaptive Control of Hydraulic Actuators With LuGre Model-Based Friction Compensation,” IEEE Transactions on Industrial Electronics, vol. 62, no. 10, pp. 6469–6477, Oct. 2015, doi: 10.1109/TIE.2015.2423660.
H. M. Gomes, “A Firefly Metaheuristic Algorithm for Structural Size and Shape Optimization with Dynamic Constraints,” Mecánica Computacional, vol. 30, no. 26, Art. no. 26, 2011.
H. M. Gomes, “A Firefly Metaheuristic Structural Size and Shape Optimisation with Natural Frequency Constraints,” Int. J. Metaheuristics, vol. 2, no. 1, pp. 38–55, Jul. 2012, doi: 10.1504/IJMHEUR.2012.048215.
J.-J. E. Slotine and W. Li, Applied Nonlinear Control. Prentice Hall, 1991.
A. Gasparetto and V. Zanotto, “A new method for smooth trajectory planning of robot manipulators,” Mechanism and Machine Theory, vol. 42, no. 4, pp. 455–471, Apr. 2007, doi: 10.1016/j.mechmachtheory.2006.04.002.
L. Piegl and W. Tiller, The NURBS Book. Springer Science & Business Media, 2012. [Online]. Available: ISBN 978-3-642-97385-7