Tracking of discrete-time unmodeled reference signals in robotic manipulators using output regulation theory and high-gain observers
Keywords:
Reference tracking, Discrete-time unmodeled signals, Robotic manipulators, Output regulation theory, High-gain observer, Multibody simulationAbstract
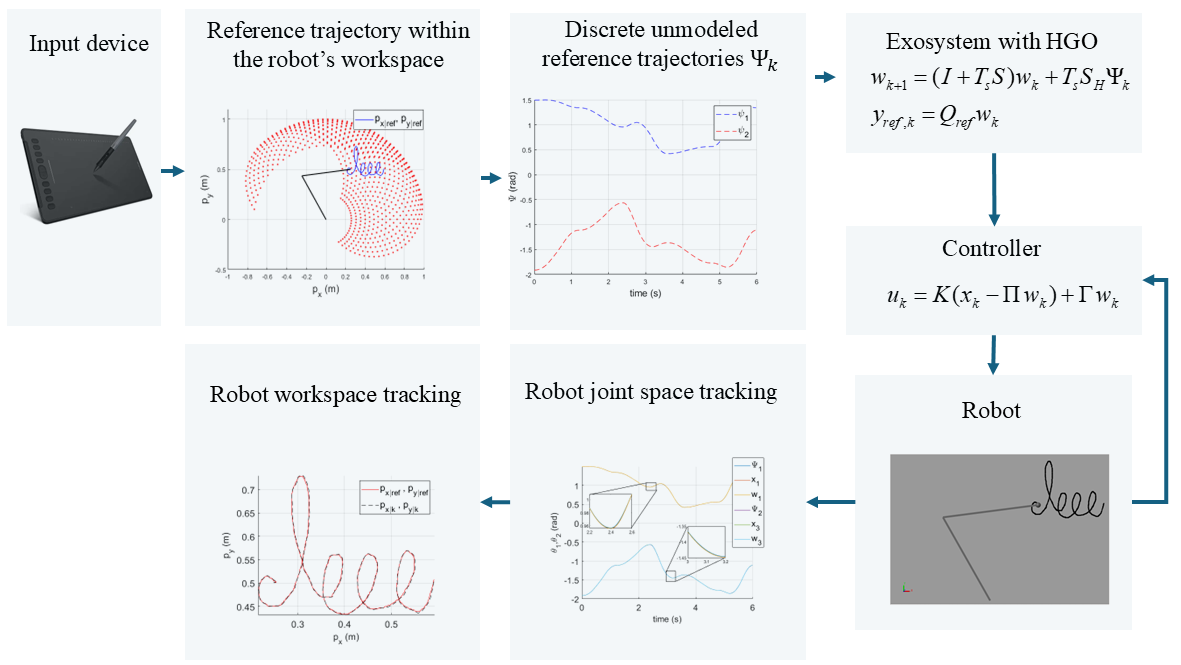
In the field of control, output regulation theory ensures the tracking of reference signals generated by a known dynamic exogenous system, referred to as the exosystem. However, there are applications where the exosystem may be unknown. In this context, the present paper proposes a controller based on Francis output regulation theory, where a high-gain observer (HGO) is used to estimate the states of the unmodeled reference signals. This observer is structurally integrated into the discrete form of Francis’ output regulation equations as the exosystem. The proposed approach assumes that discrete-time unmodeled reference signals are obtained by transforming a given trajectory from the workspace into joint space of a robotic manipulator. Consequently, the accuracy of motion in Cartesian space depends on the tracking error in each joint. As a case study, a two-degree-of-freedom robot is presented, and its dynamic model is used as the basis for constructing the controller. Finally, simulations are performed using a multibody model developed in Simulink-Simscape to demonstrate that the proposed controller satisfies the stability and asymptotic regulation criteria.
Downloads
References
@article{francis:1975,
author = {Francis, B. A. and Wonham, W. M.},
title = {The internal model principle for linear multivariable regulators},
journal = {Applied Mathematics and Optimization},
year = {1975},
volume = {2},
pages = {170--194},
doi = {https://doi.org/10.1016/S1474-6670(17)67756-5},
url = {https://doi.org/10.1016/S1474-6670(17)67756-5}
}
%%2
@article{francis:1976,
author = {Francis, B. A. and Wonham, W. M.},
title = {The internal model principle of control theory},
journal = {Automatica},
year = {1976},
volume = {12},
number = {5},
pages = {457--465},
doi = {https://doi.org/10.1016/0005-1098(76)90006-6},
url = {https://doi.org/10.1016/0005-1098(76)90006-6}
}
%%3
@article{francis:1977,
author = {Francis, Bruce A.},
title = {The linear multivariable regulator problem},
journal = {SIAM Journal on Control and Optimization},
year = {1977},
volume = {15},
number = {3},
pages = {486--505},
doi = {https://doi.org/10.1137/0315033},
url = {https://doi.org/10.1137/0315033}
}
%%4
@article{isidori:1990,
author = {Isidori, A. and Byrnes, C.I.},
title = {Output regulation of nonlinear systems},
journal = {IEEE Transactions on Automatic Control},
year = {1990},
volume = {35},
number = {2},
pages = {131--140},
doi = {https://doi.org/10.1109/9.45168},
url = {https://doi.org/10.1109/9.45168}
}
%% 5
@inproceedings{tan:2019,
author = {Xing-Xing, Tan and Han, Tao and Xiao, Bo and Zhan, Xi-Sheng and Chen, Xi},
title = {Distributed output regulation of heterogeneous linear multi-agent systems by a state feedback approach},
year = {2019},
pages = {1208--1211},
doi = {10.1109/ICIEA.2019.8834186},
address = {Xi'an, China},
isbn = {978-1-5386-9490-9},
booktitle = {2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA)},
publisher = {IEEE},
url ={https://doi.org/10.1109/ICIEA.2019.8834186}
}
%%6
@article{silani:2022,
author = {Silani, Amirreza and Cucuzzella, Michele and Scherpen, Jacquelien M. A. and Yazdanpanah, Mohammad Javad},
title = {Output regulation for load frequency control},
journal = {IEEE Transactions on Control Systems Technology},
year = {2022},
volume = {30},
number = {3},
pages = {1130--1144},
doi = {10.1109/TCST.2021.3099096},
url = {https://doi.org/10.1109/TCST.2021.3099096}
}
%%7
@article{meda-campana:2012,
author = {Meda-Campana, Jesús Alberto and Gomez-Mancilla, Julio César and Castillo-Toledo, Bernardino},
title = {Exact output regulation for nonlinear systems described by Takagi-Sugeno fuzzy models},
journal = {IEEE Transactions on Fuzzy Systems},
year = {2012},
volume = {20},
number = {2},
pages = {235--247},
doi = {10.1109/TFUZZ.2011.2172689},
url = {https://doi.org/10.1109/TFUZZ.2011.2172689},
}
%%8
@article{tapia-herrera:2013,
author = {Tapia-Herrera, Ricardo and Meda-Campaña, Jesús Alberto and Alcántara-Montes, Samuel and Hernández-Cortés, Tonatiuh and Salgado-Conrado, Lizbeth},
title = {Tuning of a T--S fuzzy output regulator using the steepest descent approach and ANFIS},
journal = {Mathematical Problems in Engineering},
year = {2013},
volume = {2013},
number = {},
pages = {e873430},
doi = {10.1155/2013/873430},
url = {https://doi.org/10.1155/2013/873430},
}
%% 9
@article{hernandez_cortes:2015,
author = {Hernández-Cortés, Tonatiuh and Curtidor-López, A. Verónica and Rodríguez-Valdez, Jorge and Meda-Campaña, Jesús A. and Tapia-Herrera, Ricardo and Rubio, José de Jesús},
title = {Synchronization of discrete-Time chaotic fuzzy systems by means of fuzzy output regulation using genetic algorithm},
journal = {Mathematical Problems in Engineering},
year = {2015},
volume = {2015},
number = {},
pages = {e198371},
doi = {10.1155/2015/198371},
url = {https://doi.org/10.1155/2015/198371},
}
%% 10
@article{bao-zhu:2022,
author = {Bao-Zhu, Guo and Ren-Xi, Zhao},
title = {Output regulation for a heat equation with unknown exosystem},
journal = {Automatica},
year = {2022},
volume = {138},
number = {},
pages = {110159},
doi = {10.1016/j.automatica.2022.110159},
url = {https://doi.org/10.1016/j.automatica.2022.110159}
}
%% 11
@article{bao-zhu:2023,
author = {Bao-Zhu, Guo and Ren-Xi, Zhao},
title = {Output regulation for Euler-Bernoulli beam with unknown exosystem using adaptive internal model},
journal = {Journal on Control and Optimization},
year = {2023},
volume = {61},
number = {4},
pages = {2088-2113},
doi = {https://doi.org/10.1137/22M1501805},
url = {https://doi.org/10.1137/22M1501805},
}
%% 12
@article{ren-xi:2023,
author = {Ren-Xi, Zhao and Bao-Zhu, Guo},
title = {Output regulation for a wave equation with unknown exosystem},
journal = {IEEE Transactions on Automatic Control},
year = {2024},
volume = {69},
number = {5},
pages = {3066-3079},
doi = {10.1109/TAC.2023.3303340},
url = {https://doi.org/10.1109/TAC.2023.3303340}
}
%% 13
@inproceedings{zhengtao:2002,
author = {Zhengtao, Ding},
title = {Universal output regulation for nonlinear systems in output feedback form},
booktitle={Proceedings of the 41st IEEE Conference on Decision and Control, 2002.},
year = {2002},
volume = {4},
number = {},
pages = {3837-3842 vol.4},
doi = {10.1109/CDC.2002.1184963},
url = {https://doi.org/10.1109/CDC.2002.1184963},
}
%% 14
@article{dong:2018,
author = {Dong, Y. and Chen, J. and Huang, J.},
title = {Cooperative robust output regulation for second-order nonlinear multiagent systems with an unknown exosystem},
journal = {IEEE Transactions on Automatic Control},
year = {2018},
volume = {63},
number = {10},
pages = {3418--3425},
doi = {10.1109/TAC.2018.2796502},
url = {https://doi.org/10.1109/TAC.2018.2796502},
}
%% 15
@article{jin:2023,
author = {Jin, Z. and Liang, D. and Li, S. and Wang, C. and Liang, Z.},
title = {Robust cooperative output regulation for heterogeneous nonlinear multi-agent systems with an unknown exosystem subject to jointly connected switching networks},
journal = {ISA Transactions},
volume = {143},
pages = {59-78},
year = {2023},
doi = {https://doi.org/10.1016/j.isatra.2023.09.006},
url = {https://doi.org/10.1016/j.isatra.2023.09.006},
}
%% 16
@inproceedings{khalil:2008,
author = {Khalil, Hassan K.},
title = {High-gain observers in nonlinear feedback control},
year = {2008},
pages = {47--57},
doi = {10.1109/ICCAS.2008.4694705},
address = {Seoul, South Korea},
booktitle = {2008 {International} {Conference} on {Control}, {Automation} and {Systems}},
publisher = {IEEE},
url ={https://doi.org/10.1109/ICCAS.2008.4694705},
}
%%17
@article{hernandez-cortes:2023,
author = {Hernández-Cortés, Tonatiuh and Amador-Macias, Miguel and Tapia-Herrera, Ricardo and Meda-Campaña, Jesús Alberto},
title = {On the output regulation for an underactuated inverse pendulum when the exosystem is a high-gain observer},
journal = {IEEE Access},
year = {2023},
volume = {11},
number = {},
pages = {10792--10800},
doi = {10.1109/ACCESS.2023.3240656},
url ={https://doi.org/ACCESS.2023.3240656}
}
%%18
@article{meda-campana:2023a,
author = {Meda-Campaña, Jesús Alberto and Torres-Cruz, Raúl Eduardo and Rojas-Ruiz, Alexis Jesus and Tapia-Herrera, Ricardo and Hernández-Cortés, Tonatiuh and Páramo-Carranza, Luis Alberto},
title = {The output regulation and the Kalman filter as the signal generator},
journal = {IEEE Access},
year = {2023},
volume = {11},
number = {},
pages = {90825--90838},
doi = {10.1109/ACCESS.2023.3308851},
url ={https://doi.org/10.1109/ACCESS.2023.3308851},
}
%%19
@article{meda-campana:2023,
author = {Meda-Campaña, Jesús Alberto and Ancona-Bravo, Ricardo Ismael and Escobedo-Alva, Jonathan Omega and Hernández-Cortés, Tonatiuh and Tapia-Herrera, Ricardo},
title = {The output regulation problem for unmodeled reference/Disturbance signals using high--gain observers},
journal = {International Journal of Control, Automation and Systems},
year = {2023},
volume = {21},
number = {4},
pages = {1049--1061},
doi = {https://doi.org/10.1007/s12555-021-0766-9},
url = {https://doi.org/10.1007/s12555-021-0766-9},
}
%%20
@article{atassi:1999,
author = {Atassi, A.N. and Khalil, H.K.},
title = {A separation principle for the stabilization of a class of nonlinear systems},
journal = {IEEE Transactions on Automatic Control},
year = {1999},
volume = {44},
number = {9},
pages = {1672--1687},
doi = {10.1109/9.788534},
url = {https://doi.org/10.1109/9.788534},
}
@article{xiao-jun:2000,
author = {Xiao-Jun, Ma and Zeng-Qi, Sun},
title = {Output tracking and regulation of nonlinear system based on {Takagi}-{Sugeno} fuzzy model},
journal = {IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics)},
year = {2000},
volume = {30},
number = {1},
pages = {47--59},
doi = {10.1109/3477.826946},
url = {https://doi.org/10.1109/3477.826946},
}
@article{wang:2019,
author = {Wang, Fei and Chao, Zhi-qiang and Huang, Lian-bing and Li, Hua-ying and Zhang, Chuan-qing},
title = {Trajectory tracking control of robot manipulator based on {RBF} neural network and fuzzy sliding mode},
journal = {Cluster Computing},
year = {2019},
volume = {22},
number = {3},
pages = {5799--5809},
doi = {10.1007/s10586-017-1538-4},
url = {https://doi.org/10.1007/s10586-017-1538-4},
}
@article{wang:2021,
author = {Wang, Z. and Zou, L. and Su, X. and Luo, G. and Li, R. and Huang, Y.},
title = {Hybrid force/position control in workspace of robotic manipulator in uncertain environments based on adaptive fuzzy control},
journal = {Robotics amd Autonomous Systems},
year = {2021},
volume = {145},
number = {},
pages = {103870},
doi = {https://doi.org/10.1016/j.robot.2021.103870},
url = {https://doi.org/10.1016/j.robot.2021.103870},
}
@book{Kelly:2003,
title={Control de movimiento de robots manipuladores},
author={Kelly, R. and Santibáñez, V.},
year={2003},
publisher={Prentice Hall},
address={Madrid, Spain}
}
@book{Craig:2006,
title={Robótica},
author={Craig, J.J.},
year={2006},
publisher={Prentice Hall},
address={México}
}
%%%%%%%%% REf's for second version
@article{b03_v2,
author={Wang, Zhongyang and Wang, Youqing and Kowalczuk, Zdzisław},
journal={IEEE/CAA Journal of Automatica Sinica},
title={Adaptive Optimal Discrete-Time Output-Feedback Using an Internal Model Principle and Adaptive Dynamic Programming},
year={2024},
volume={11},
number={1},
pages={131-140},
keywords={Adaptation models;Regulators;System dynamics;Heuristic algorithms;Observers;Mathematical models;Inverters;Adaptive dynamic programming (ADP);internal model principle (IMP);output feedback problem;policy iteration (PI);value iteration (VI)},
doi={10.1109/JAS.2023.123759},
url={https://doi.org/10.1109/JAS.2023.123759}
}
@article{b05_v2,
author={Marino, R. and Tomei, P.},
journal={IEEE Transactions on Automatic Control},
title={Output regulation for linear systems via adaptive internal model},
year={2003},
volume={48},
number={12},
pages={2199-2202},
keywords={Linear systems;Adaptive systems;Regulators;Signal generators;Output feedback;Frequency estimation;Observers;Vectors;Algorithm design and analysis;Feedback control},
doi={https://doi.org/10.1109/TAC.2003.820143},
url={https://doi.org/10.1109/TAC.2003.820143}
}
@article{b06_v2,
author={Xie, Kedi and Guay, Martin and Lu, Maobin and Wang, Shimin and Deng, Fang},
journal={IEEE Transactions on Automatic Control},
title={Optimal Output Feedback Learning Control for Continuous-Time Linear Quadratic Regulation},
year={2025},
volume={70},
number={6},
pages={4124-4131},
keywords={Output feedback;Observers;Symmetric matrices;Convergence;State feedback;Heuristic algorithms;Regulation;Adaptation models;Vectors;Transient analysis;Linear quadratic regulation (LQR);observer error;optimal output feedback control;reinforcement learning (RL)},
doi={https://doi.org/10.1109/TAC.2025.3532182},
url={https://doi.org/10.1109/TAC.2025.3532182}
}
@article{b07_v2,
title = {Static output-feedback control design from data},
journal = {European Journal of Control},
volume = {85},
pages = {101260},
year = {2025},
issn = {0947-3580},
doi = {https://doi.org/10.1016/j.ejcon.2025.101260},
url = {https://doi.org/10.1016/j.ejcon.2025.101260},
author = {Pedro M. Oliveira and Pedro H.S. Coutinho and Iury Bessa and Márcio J. Lacerda and Reinaldo M. Palhares},
keywords = {Control design, Data-based control, Static output-feedback control, Time-invariant systems, Lyapunov theory},
abstract = {This paper investigates the problem of data-driven static output-feedback (SOF) control design for linear time-invariant discrete-time systems. Although data-driven control techniques have attracted significant attention recently, the design of data-driven SOF controllers is still an open problem. The proposed method relies only on input-state-output data from the open-loop system to represent the system dynamics and to construct the control design conditions using linear matrix inequalities. As an extra contribution, the design problem with noisy data is raised, and some solutions aiming to increase the robustness against noise, based on data preprocessing, are proposed. We also develop a SOF condition based only on input-output data from an autoregressive representation. To illustrate our method’s effectiveness, we consider two simulation examples of multiple input multiple output systems and an experimental example in the twin-rotor aerodynamic system. The experiments show that the data-driven SOF controller guarantees the stabilization of those systems. Moreover, experiments with noisy data illustrate the increased robustness of the proposed techniques.}
}
@article{b08_v2,
author={Jie Huang and Ching-Fang Lin},
journal={IEEE Transactions on Automatic Control},
title={On a robust nonlinear servomechanism problem},
year={1994},
volume={39},
number={7},
pages={1510-1513},
keywords={Robustness;Servomechanisms;Robust control;Control systems;Error correction;Steady-state;Automatic control;Filtering theory;Linear approximation;Nonlinear systems},
doi={https://doi.org/10.1109/9.299646},
url={https://doi.org/10.1109/9.299646}
}
@article{b09_v2,
author={Zhiqiang Gao},
booktitle={2006 American Control Conference},
title={Active disturbance rejection control: a paradigm shift in feedback control system design},
year={2006},
volume={},
number={},
pages={1-7},
keywords={Control systems;Feedback control;Mathematical model;Control theory;Optimal control;Motion control;Steam engines;Educational institutions;Design engineering;Robust control},
doi={https://doi.org/10.1109/ACC.2006.1656579},
url={https://doi.org/10.1109/ACC.2006.1656579}
}
@article{Garcia-Vazquez:2025,
author={García-Vázquez, Horacio and Larios-Navarro, Ulises and Castillo-Toledo, Bernardino and Di Gennaro, Stefano},
journal={Journal of the Franklin Institute},
title={Robust cooperative output regulation for linear multi-agent systems under intermittent measurements},
year={2025},
volume={362},
number={2},
pages={1-17},
keywords={Consensus protocol; Cooperative output regulation; Hybrid regulation; Multi-agent systems (MASs)},
doi={https://doi.org/10.1016/j.jfranklin.2024.107473},
url={https://doi.org/10.1016/j.jfranklin.2024.107473}
}
@article{Lin:2025,
author={L. Lin and J. Huang},
journal={IEEE Transactions on Automatic Control},
title={Direct Adaptive Cooperative Output Regulation of Unknown Multi-Agent Systems via Distributed Internal Model},
year={2025},
volume={},
number={},
pages={1-8},
keywords={Mathematical models;Regulation;Multi-agent systems;Linear systems;Feedforward systems;Vectors;Symmetric matrices;Computational efficiency;Adaptation models;Riccati equations;Cooperative output regulation;distributed internal model;multi-agent systems;reinforcement learning},
doi={10.1109/TAC.2025.3576180},
url={https://ieeexplore.ieee.org/iel8/9/4601496/11021687.pdf}
}
@inproceedings{Harry:2024,
author={Harry, T. and Guay, M.},
title = {Data-driven Gaussian process output regulation for a class nonlinear systems},
year = {2024},
pages = {2910-2915},
doi = {10.1109/CDC56724.2024.10886004},
address = {Milan, Italy},
booktitle = {2024 IEEE 63rd Conference on Decision and Control (CDC)},
publisher = {IEEE},
url={https://doi.org/10.1109/CDC56724.2024.10886004}
}
@article{Shuan:2023,
author={Shuang, Duan and Zhida, Shao and Xinyao, Chen and Xuan, Li and Yiyang, Chen and Haidong, He},
journal={Actuators},
title={Design of High Precision Interval Observer for Robot System},
year={2023},
volume={12},
number={3},
pages={1-11},
keywords={wheeled mobile robot (WMR); trajectory tracking; high precision interval observer},
doi={https://doi.org/10.3390/act12030116},
url={https://doi.org/10.3390/act12030116}
}
@article{Hernandez:2024,
author={Hernández-González, Omar and Ramírez-Rasgado, Felipe and Farza, Monher and Guerrero-Sánchez, María-Eusebia and Astorga-Zaragoza, Carlos-Manuel and M'Saad, Mohammed and Valencia-Palomo, Guillermo},
journal={Aerospace},
title={Observer for Nonlinear Systems with Time-Varying Delays: Application to a Two-Degrees-of-Freedom Helicopter},
year={2024},
volume={11},
number={3},
pages={1-19},
keywords={observer synthesis; nonlinear system; uncertain system; sampled system; time-varyng delays},
doi={https://doi.org/10.3390/aerospace11030206},
url={https://doi.org/10.3390/aerospace11030206}
}
@article{Won:2017,
author={Won, D. and Kim, W. and Tomizuka, M.},
journal={IEEE/ASME Transactions on Mechatronics},
title={High-Gain-Observer-Based Integral Sliding Mode Control for Position Tracking of Electrohydraulic Servo Systems},
year={2017},
volume={22},
number={6},
pages={2695-2704},
keywords={Observers;Servomotors;Mathematical model;Stability analysis;Electrohydraulics;Pistons;Actuators;Electrohydraulic servo system (EHSS);flatness;observer;position tracking control},
doi={10.1109/TMECH.2017.2764110},
url={https://doi.org/10.1109/TMECH.2017.2764110}
}
@article{Di-Kai:2023,
author={Di-Kai, Lou and Zhang, Dan and Hua-Geng, Liang},
journal={IEEE Transactions on Circuits and Systems II: Express Briefs},
title={An Improved High-Gain Observer Design for Flexible Needle Steering},
year={2023},
volume={70},
number={9},
pages={3489-3493},
keywords={Needles;Observers;Noise measurement;Robots;Ultrasonic variables measurement;Surgery;Power measurement;High-gain observer;measurement noise;peaking phenomenon;flexible needle},
doi={10.1109/TCSII.2023.3251656},
url={https://doi.org/10.1109/TCSII.2023.3251656}
}
@article{Hernandez-C:2024,
author={Hernández-Cortés, T and Amador-MAcías, M. and Tapia-Herrera, R. and Meda-Campaña, J.},
journal={IEEE Latin America Transactions},
title={Output Regulation for Descriptor Systems with High-Gain Observer Used as Exosystem for Unmodeled References},
year={2024},
volume={22},
number={2},
pages={156-165},
keywords={Regulation;Observers;Mathematical models;Linear matrix inequalities;Adaptation models;Sun;Streaming media;output regulation;high order-gain observer;linear matrix inequality;descriptor system},
doi={10.1109/TLA.2024.10412037},
url={https://doi.org/10.1109/TLA.2024.10412037}
}
@article{Legnani:2021,
author={Legnani, Giovanni and Fassi, Irene and Tasora, Alessandro and Fusai, Dario},
journal={Mechanism and Machine Theory},
title={A practical algorithm for smooth interpolation between different angular positions},
year={2021},
volume={162},
number={},
pages={1-20},
keywords={Smooth rotation interpolationAngular trajectoryRotationsQuaternions},
doi={https://doi.org/10.1016/j.mechmachtheory.2021.104341},
url={https://doi.org/10.1016/j.mechmachtheory.2021.104341}
}
% output regulation and robot manipulators
@article{Shang:2003,
author={Shang-Teh, Wu and Yi-Chih, Chuang},
journal={IEEE Transactions on Robotics and Automation},
title={Output regulation of robot manipulators with a constantly revolving arm},
year={2003},
volume={19},
number={6},
pages={1002-1006},
keywords={Robots;Vibration control;Asymptotic stability;Servomechanisms;Frequency;Manipulator dynamics;Ecosystems;Output feedback;Robust stability;Feedback loop},
doi={https://doi.org/10.1016/j.mechmachtheory.2021.104341},
url={https://doi.org/10.1016/j.mechmachtheory.2021.104341}
}
@inproceedings{Saad:2018,
author={Saad, Muhammad and Shirazi, Rida Abbas and Liaquat, Muwahida},
title = {Output Regulation of n-Link Robotic Manipulator Using Feedback Linearizable Systems under the Approach of Cascade High Gain Observers},
year = {2018},
pages = {16-20},
doi = {https://doi.org/10.1145/3284516.3284547},
address = {New York, United States},
booktitle = {ICCMA 2018: Proceedings of the 6th International Conference on Control, Mechatronics and Automation},
publisher = {Association for Computing Machinery},
url={https://doi.org/10.1109/ACCESS.2023.3240656}
}
@article{Rubio:2024,
author={Rubio, José de Jesús and Cordova, Daniel Andrés and Hernández, Mario Alberto and Orozoco, Eduardo and Rosas, Francisco Javier and Gutierrez, Guadalupe Juliana and Meda-Campaña, Jesús Alberto and Aguilar-Ibañez, Carlos},
journal={International Journal of Intelligent Robotics and Applications},
title={References tracking and perturbations reconstruction in a Cartesian robot},
year={2024},
volume={8},
number={},
pages={357-369},
doi={https://doi.org/10.1007/s41315-023-00315-w},
url={https://doi.org/10.1007/s41315-023-00315-w}
}
@article{Zheng:2025,
author={Zheng, S. and Zha, Y. and Ahn, C. K. and Lu, S. and Song, B.},
journal={IEEE/ASME Transactions on Mechatronics},
title={Constrained Finite-Time Output Regulation for Robot Manipulators With Control Input Delay},
year={2025},
volume={8},
number={},
pages={1-13},
doi={10.1109/TMECH.2025.3527751},
url={https://doi.org/10.1109/TMECH.2025.3527751}
}
@article{Wu:2022,
author={Wu, H. and Xu, D. and Jayawardhana, B.},
journal={IEEE Transactions on Automatic Control},
title={On Self-Learning Mechanism for the Output Regulation of Second-Order Affine Nonlinear Systems},
year={2022},
volume={67},
number={11},
pages={5964-5979},
doi={10.1109/TAC.2021.3130881},
url={https://doi.org/10.1109/TAC.2021.3130881}
}
@article{Zeng:2023,
author={Zeng, K. and Liu, W.},
journal={International Journal of Robust and Nonlinear Control},
title={Sampled-data robust practical tracking of Euler-Lagrange systems with an uncertain exosystem},
year={2023},
volume={34},
number={3},
pages={1629-1647},
doi={https://doi.org/10.1002/rnc.7048},
url={https://doi.org/10.1002/rnc.7048}
}
@book{Russell:2022,
title={Kinematics and Dynamics of Mechanical Systems: Implementation in MATLABtextregistered and Simscape Multibodytextregistered},
author={Russell, K. and Shen, J.Q. and Shodi, R.},
year={2022},
publisher={CRC Press},
url={https://doi.org/10.1201/9781003316961}
}