Impedance Space Method: Time-Independent Parametric Ellipses for Robot Compliant Control
Keywords:
Impedance control, Force control, Human-robot interactionAbstract
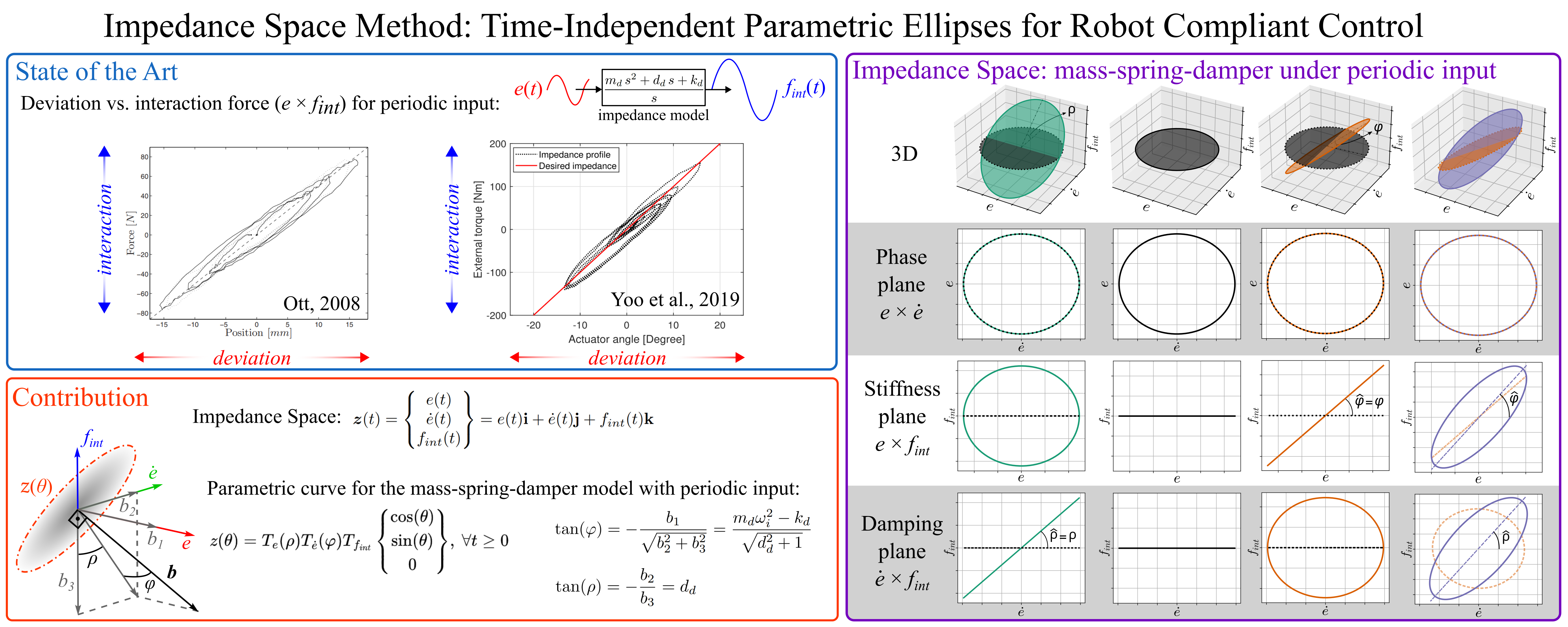
This paper proposes a novel 3D graphical representation for impedance control, called the impedance space, to foster the analysis of the dynamic behavior of robotic compliant controllers. The method overcomes limitations of existing 2D graphical approaches by incorporating mass, stiffness, and damping dynamics, and associates the impedance control parameters with linear transformations to plot a parametric 3D ellipse and its projections in 2D for a mass-spring-damper impedance under sinusoidal reference. Experimental evaluation demonstrates the effectiveness of the proposed representation for analysis of impedance control. The method applies to various compliant control topologies and can be extended to other model-based control approaches.
Downloads
References
S. Grillner, “The role of muscle stiffness in meeting the changingpostural and locomotor requirements for force development by the ankle extensors,” Acta Physiologica Scandinavica, vol. 86, no. 1, pp. 92–108, 1972, DOI: 10.1111/j.1748-1716.1972.tb00227.x.
N. Hogan, “Impedance control: An approach to manipulation: Part I — Theory,” Journal of Dynamic Systems, Measurement, and Control, vol. 107, no. 1, pp. 1–7, 1985.
Y. Huo, X. Li, X. Zhang, X. Li, and D. Sun, “Adaptive intentiondriven variable impedance control for wearable robots with compliant actuators,” IEEE Transactions on Control Systems Technology, vol. 31, no. 3, pp. 1308–1323, 2022, DOI: 10.1109/TCST.2022.3222728.
M. Panzirsch, H. Singh, X. Xu, A. Dietrich, T. Hulin, E. Steinbach, and A. Albu-Schaeffer, “Enhancing the force transparency of the energyreflection-based time-domain passivity approach,” IEEE Transactions on Control Systems Technology, 2024, DOI: 10.1109/TCST.2024.3458831.
S. Lloyd, R. A. Irani, and M. Ahmadi, “Improved accuracy and contact stability in robotic contouring with simultaneous registration and machining,” IEEE Transactions on Control Systems Technology, 2024, DOI: 10.1109/TCST.2023.3348749.
T. Boaventura, J. Buchli, C. Semini, and D. G. Caldwell, “Modelbased hydraulic impedance control for dynamic robots,” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1324–1336, 2015, DOI: 10.1109/TRO.2015.2482061.
P. Song, Y. Yu, and X. Zhang, “A tutorial survey and comparison of impedance control on robotic manipulation,” Robotica, vol. 37, no. 5, pp. 801–836, 2019, DOI: 0.1017/S0263574718001339.
S. Yoo, W. Lee, and W. K. Chung, “Impedance control of hydraulic actuation systems with inherent backdrivability,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 5, pp. 1921–1930, 2019, DOI: 10.1109/TMECH.2019.2932132.
M. Focchi, T. Boaventura, C. Semini, M. Frigerio, J. Buchli, and D. G. Caldwell, “Torque-control based compliant actuation of a quadruped robot,” in 2012 12th IEEE international workshop on advanced motion control (AMC). IEEE, 2012, pp. 1–6, DOI: 10.1109/AMC.2012.6197133.
A. Ajoudani, N. G. Tsagarakis, and A. Bicchi, “On the role of robot configuration in cartesian stiffness control,” in 2015 IEEE international conference on robotics and automation (ICRA). IEEE, 2015, pp. 1010–1016, DOI: 10.1109/ICRA.2015.7139300.
J. Zhang, H. Li, Q. Liu, and S. Li, “The model reference adaptive impedance control for underwater manipulator compliant operation,”Transactions of the Institute of Measurement and Control, vol. 45, no. 11, pp. 2135–2148, 2023.
M. Dalle Vedove, E. Lamon, D. Fontanelli, L. Palopoli, and M. Saveriano, “A passivity-based variable impedance controller for incremental learning of periodic interactive tasks,” in 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE). IEEE, 2024, pp. 2604–2609.
M. Mazare, S. Tolu, and M. Taghizadeh, “Adaptive variable impedance control for a modular soft robot manipulator in configuration space,” Meccanica, vol. 57, no. 1, pp. 1–15, 2022.
A. Sharon, N. Hogan, and D. E. Hardt, “Controller design in the physical domain,” Journal of the Franklin Institute, vol. 328, no. 5-6, pp. 697–721, 1991, DOI: 10.1016/0016-0032(91)90049-9.
J. Lachner, F. Allmendinger, S. Stramigioli, and N. Hogan, “Shaping impedances to comply with constrained task dynamics,” IEEE Transactions on Robotics, vol. 38, no. 5, pp. 2750–2767, 2022, DOI: 10.1109/TRO.2022.3153949.
N. Hogan, “Modularity and causality in physical system modeling,” Journal of dynamic systems, measurement, and control, vol. 109, no. 4, pp. 384–391, 1987, DOI: 10.1115/1.3143871.
P. J. Gawthrop and G. P. Bevan, “Bond-graph modeling,” IEEE Control Systems Magazine, vol. 27, no. 2, pp. 24–45, 2007, DOI: 10.1109/MCS.2007.338279.
S. K. Charles and N. Hogan, “Stiffness, not inertial coupling, determines path curvature of wrist motions,” Journal of neurophysiology, vol. 107, no. 4, pp. 1230–1240, 2012, DOI: 10.1152/jn.00428.2011.
Z. Ranko, Angel Valera Fern ´ andez, and P. J. G. Gil, “Impact and force control with switching between mechanical impedance parameters,” IFAC Proceedings Volumes, vol. 38, no. 1, pp. 169–174, 2005, DOI: 10.3182/20050703-6-CZ-1902.01298.
H. Khalil, Nonlinear Systems, ser. Pearson Education. Prentice Hall, 2002, ISBN: 9780130673893.
F. Verhulst, Nonlinear Differential Equations and Dynamical Systems, ser. Universitext. Springer Berlin Heidelberg, 2006, ISBN:9783540609346.
J. Stewart, “Vector functions: arc lenth and curvature,” in Calculus: Early Transcendentals, 6th ed. Belmont, CA: Thomson Brooks/Cole, 2008, pp. 830–838, ISBN: 9780495382737.
E. G. Vergamini, L. Felipe dos Santos, C. L. A. Zanette, Y. Moreno, F. M. Escalante Ortega, and T. Boaventura, “Construction of an impedance control test bench,” in Proceedings of the 27th International Congress of Mechanical Engineering, ser. COB2023. ABCM, 2023, DOI: 10.26678/abcm.cobem2023.cob2023-0847. [Online]. Available: https://www.researchgate.net/publication/378419899.
E. Vergamini, L. F. Santos, and C. Zanette, “Ic2d project,” https://github.com/leggedrobotics-usp/ic2d, 2023.
E. Dimo and A. Calanca, “Environment aware friction observer with applications to force control benchmarking,” Actuators, vol. 13, no. 2, 2024, DOI: 10.3390/act13020053. [Online]. Available: https://www.mdpi.com/2076-0825/13/2/53
T. Boaventura, M. Focchi, M. Frigerio, J. Buchli, C. Semini, G. A. Medrano-Cerda, and D. G. Caldwell, “On the role of load motion compensation in high-performance force control,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp. 4066–4071, DOI: 10.1109/IROS.2012.6385953.
R. Halır and J. Flusser, “Numerically stable direct least squares fitting of ellipses,” in Proc. 6th International Conference in Central Europe on Computer Graphics and Visualization. WSCG, vol. 98. Citeseer, 1998, pp. 125–132, ISSN: 1213-6972. [Online]. Available: https://api.semanticscholar.org/CorpusID:15772208
C. Ott, Cartesian Impedance Control of Redundant and Flexible-Joint Robots, ser. Springer Tracts in Advanced Robotics. Springer, 2008, ISBN: 9783540692553.