Average Power as an Alternative Variable for Power grip Control in Robotic Hands Without Using Force Measurements
Keywords:
Current, Grasping, PID control, Prosthetic hand, Sensorless control, Energy efficiencyAbstract
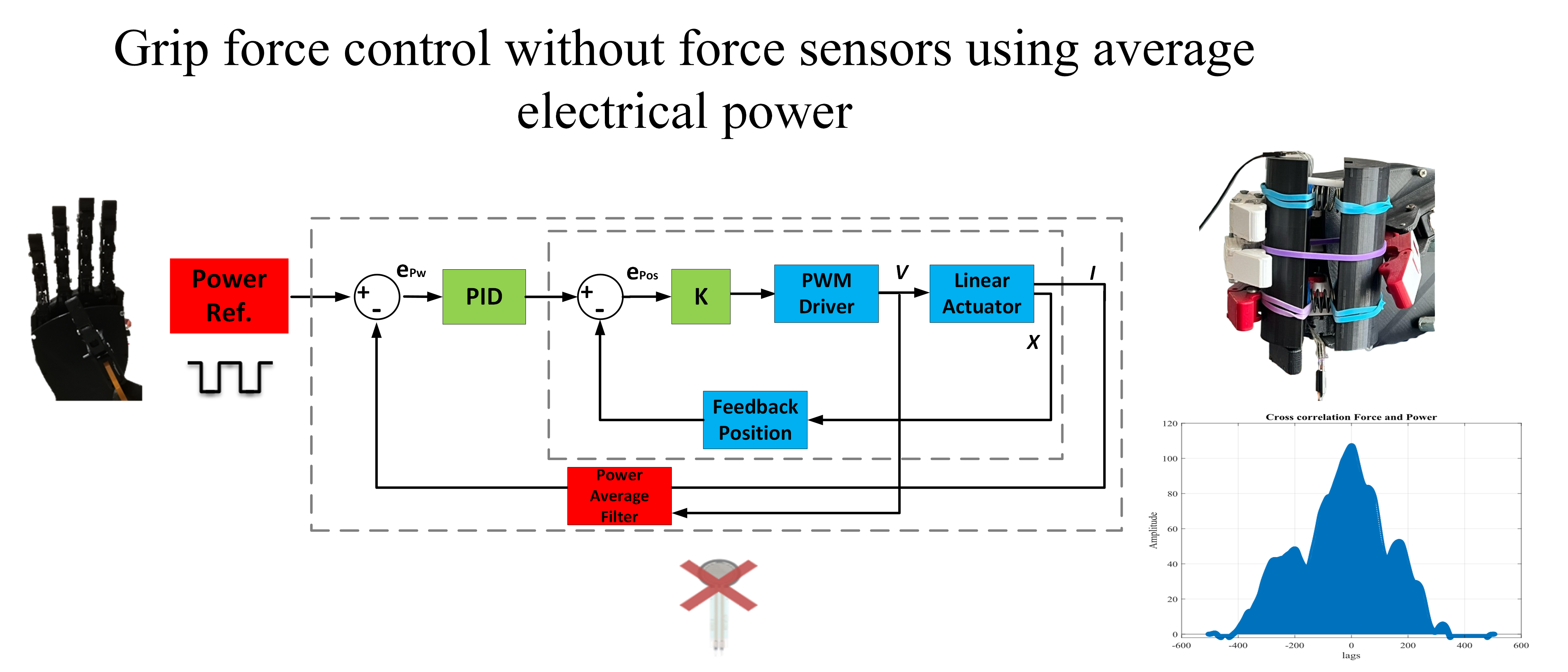
Power grip is one of the fundamental functionalities of a robotic hand prosthesis, as it is essential for performing various activities of daily living. This study proposes the use of the average electrical power consumed by the actuators as a variable correlated with grip force in mechanisms with an effective degree of freedom equal to one. This approach enables the implementation of closed-loop grip force control schemes without the need for force sensors. To evaluate the performance of the proposed method, a five-finger underactuated robotic hand prototype was developed, along with a cascade control scheme to track an average power reference. The system was implemented in the Simulink environment of Matlab, using an Arduino Mega 2560 board for signal acquisition and actuator control. The power–force relationship was validated using a variable stiffness device, in accordance with recommendations from a standardized protocol for evaluating the quality of robotic hand prostheses. The results show that average electrical power exhibits a stronger correlation with grip force than electric current, which has been used for similar purposes in previous studies. This work addresses the challenge of controlling grip force without force sensors, introducing a variable that has not been previously exploited for this purpose
Downloads
References
M. R. Cutkosky and P. K. Wright, “Modelling Manufacturing Grips and Correlations With the Design of Robotic Hands.,” pp. 1533–1539, 1986.
J. Fischer, N. W. Thompson, and J. W. K. Harrison, “The prehensile movements of the human hand,” Classic Papers in Orthopaedics, vol. 38 B, pp. 343–345, 1956, doi: 10.1007/978-1-4471-5451-8_85.
N. M. Hanafiah, R. Sam, and N. Buniyamin, “Design of an anthropomorphic robotic hand for power grip posture using SolidWorks,” Proceedings - 2014 5th IEEE Control and System Graduate Research Colloquium, ICSGRC 2014, pp. 31–36, 2014, doi: 10.1109/ICSGRC.2014.6908691.
H. M. C. M. Herath, R. A. R. C. Gopura, and T. D. Lalitharatne, “Prosthetic hand with a linkage finger mechanism for power grasping applications,” 2017 IEEE Life Sciences Conference, LSC 2017, vol. 2018-Janua, pp. 304–307, 2018, doi: 10.1109/LSC.2017.8268203.
Z. Li, Z. Hou, Y. Mao, Y. Shang, and L. Kuta, “The Development of a Two-finger Dexterous Bionic Hand with Three Grasping Patterns-NWAFU Hand,” J Bionic Eng, vol. 17, pp. 1–14, 2020, doi: 10.1007/s42235-020-0068-6.
L. E. Sánchez-Velasco, M. Arias-Montiel, E. Guzmán-Ramírez, and E. Lugo-González, “A Low-Cost EMG-Controlled Anthropomorphic Robotic Hand for Power and Precision Grasp,” Biocybern Biomed Eng, vol. 40, no. 1, pp. 221–237, 2020, doi: 10.1016/j.bbe.2019.10.002.
M. Li, “Learning partial power grasp with task-specific contact,” 2016 IEEE International Conference on Robotics and Biomimetics, ROBIO 2016, pp. 337–343, 2016, doi: 10.1109/ROBIO.2016.7866345.
K. Or, M. Tomura, A. Schmitz, S. Funabashi, and S. Sugano, “Position-force combination control with passive flexibility for versatile in-hand manipulation based on posture interpolation,” IEEE International Conference on Intelligent Robots and Systems, vol. 2016-Novem, pp. 2542–2547, 2016, doi: 10.1109/IROS.2016.7759395.
H. Moeinnia, H. Su, and W. S. Kim, “Novel Grasping Mechanisms of 3D‐Printed Prosthetic Hands,” Advanced Intelligent Systems, vol. 4, no. 11, Nov. 2022, doi: 10.1002/aisy.202200189.
H. Yang et al., “A lightweight prosthetic hand with 19-DOF dexterity and human-level functions,” Nat Commun, vol. 16, no. 1, p. 955, Dec. 2025, doi: 10.1038/s41467-025-56352-5.
P. Weiner, J. Starke, F. Hundhausen, J. Beil, and T. Asfour, “The KIT Prosthetic Hand: Design and Control,” in IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, Oct. 2018, pp. 3328–3334. doi: 10.1109/IROS.2018.8593851.
Presidencia de la República, “Estadísticas de Asistencia Integral a las Víctimas de MAP y MUSE.” Accessed: May 11, 2025. [Online]. Available: https://www.accioncontraminas.gov.co/Estadisticas/Paginas/Estadisticas-de-Victimas.aspx
Joseph T. Belte and Aaron M. Dollar, “Performance Characteristics of Anthropomorphic Prosthetic Hands,” in International Conference on Rehabilitation Robotics Rehab Week Zurich, Switzerland: IEEE, Jul. 2011.
Y. Xu, C. Jiang, and Y. Jie, “Compliance control for grasping with a bionic robot hand,” Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, pp. 5280–5285, 2016, doi: 10.1109/CCDC.2016.7531942.
A. S. Sadun, J. Jalani, J. Abdul Sukor, and F. Jamil, “Force control for a 3-Finger Adaptive Robot Gripper by using PID controller,” in 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation, ROMA 2016, Ipoh, Malaysia: IEEE, 2017, pp. 1–6. doi: 10.1109/ROMA.2016.7847807.
B. Choukri, “Hybrid control of the triple force/position/speed in one-finger joint remotely actuated,” EEA - Electrotehnica, Electronica, Automatica, vol. 64, no. 3, pp. 96–106, 2016.
S. Hernandez-mendez and A. Marin-hernandez, “A Switching Position / Force Controller for Two Independent Finger Gripper over ROS,” in 2017 International Conference on Electronics, Communications and Computers (CONIELECOMP), Cholula, Mexico: IEEE, 2017, pp. 1–6. doi: 10.1109/CONIELECOMP.2017.7891813.
T. Zhang, L. Jiang, and H. Liu, “A novel grasping force control strategy for multi-fingered prosthetic hand,” Journal of Central South University of Technology (English Edition), vol. 19, no. 6, pp. 1537–1542, Jun. 2012, doi: 10.1007/s11771-012-1173-4.
Huanxin Luo, Xiaogang Duan, and Hua Deng, “Sliding Mode Impedance Control of a Underactuated Prosthetic Hand,” in International Conference on Information and Automation, Hailar, China: IEEE, Jul. 2014, p. 1317.
X. Xu, H. Deng, Y. Zhang, and N. Yi, “Compliant Grasp Control Method for the Underactuated Prosthetic Hand Based on the Estimation of Grasping Force and Muscle Stiffness with sEMG,” Biomimetics, vol. 9, no. 11, Nov. 2024, doi: 10.3390/biomimetics9110658.
S. A. Pertuz, C. H. Llanos, and D. M. Munoz, “Development of a Robotic Hand Using Bioinspired Optimization for Mechanical and Control Design: UnB-Hand,” IEEE Access, vol. 9, pp. 61010–61023, 2021, doi: 10.1109/ACCESS.2021.3073010.
M. Pfanne, M. Chalon, F. Stulp, H. Ritter, and A. Albu-Schäffer, “Object-Level Impedance Control for Dexterous In-Hand Manipulation,” IEEE Robot Autom Lett, vol. 5, no. 2, pp. 2987–2994, Apr. 2020, doi: 10.1109/LRA.2020.2974702.
M. Aman et al., “Bionic hand as artificial organ: Current status and future perspectives,” Artif Organs, vol. 43, no. 2, pp. 109–118, 2019, doi: 10.1111/aor.13422.
H. Bayoumi, M. I. Awad, and S. A. Maged, “An Improved Approach for Grasp Force Sensing and Control of Upper Limb Soft Robotic Prosthetics,” Micromachines (Basel), vol. 14, no. 3, Mar. 2023, doi: 10.3390/mi14030596.
Y. Wang, Y. Tian, Z. Li, H. She, and Z. Jiang, “Research on Adaptive Grasping with a Prosthetic Hand Based on Perceptual Information on Hardness and Surface Roughness,” Micromachines (Basel), vol. 15, no. 6, Jun. 2024, doi: 10.3390/mi15060675.
G. Fonseca, J. Nunes-Pereira, and A. P. Silva, “3D Printed Robotic Hand with Piezoresistive Touch Capability,” Applied Sciences (Switzerland), vol. 13, no. 14, Jul. 2023, doi: 10.3390/app13148002.
L. N. Rojas-García, C. A. Chávez-Olivares, I. Bonilla-Gutiérrez, M. O. Mendoza-Gutiérrez, and F. Ramírez-Cardona, “Force/position control with bounded actions on a dexterous robotic hand with two-degree-of-freedom fingers,” Biocybern Biomed Eng, vol. 42, no. 1, pp. 233–246, Jan. 2022, doi: 10.1016/j.bbe.2021.12.006.
V. Mohammadi et al., “Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control,” Sensors, vol. 24, no. 8, Apr. 2024, doi: 10.3390/s24082585.
A. Matos et al., “Three-fingered gripper for multiform object grasping with force feedback sensing control,” in 2020 IEEE ANDESCON, ANDESCON 2020, Institute of Electrical and Electronics Engineers Inc., Oct. 2020. doi: 10.1109/ANDESCON50619.2020.9271990.
A. Prakash and S. Sharma, “A low-cost system to control prehension force of a custom-made myoelectric hand prosthesis,” Research on Biomedical Engineering, no. Muzumdar 2004, 2020, doi: 10.1007/s42600-020-00064-w.
M. Abdeetedal and M. R. Kermani, “Grasp and Stress Analysis of an Underactuated Finger for Proprioceptive Tactile Sensing,” IEEE/ASME Transactions on Mechatronics, vol. 23, no. 4, pp. 1619–1626, Aug. 2018, doi: 10.1109/TMECH.2018.2844327.
R. A. Romeo, F. Cordelia, A. Davalli, R. Sacchetti, E. Guglielmelli, and L. Zollo, “An instrumented object for studying human grasping,” IEEE International Conference on Rehabilitation Robotics, pp. 1031–1036, 2017, doi: 10.1109/ICORR.2017.8009385.
D. Esposito et al., “Evaluation of grip force and energy efficiency of the ‘federica’ hand,” Machines, vol. 9, no. 2, pp. 1–19, Feb. 2021, doi: 10.3390/machines9020025.
E. Drelich et al., “Force prediction in the cylindrical grip for a model of hand prosthesis,” Sci Rep, vol. 13, no. 1, Dec. 2023, doi: 10.1038/s41598-023-43600-1.
F. J. Ruiz-Ruiz, J. Ventura, C. Urdiales, and J. M. Gómez-de-Gabriel, “Compliant gripper with force estimation for physical human–robot interaction,” Mech Mach Theory, vol. 178, Dec. 2022, doi: 10.1016/j.mechmachtheory.2022.105062.
I. Chang, K. M. Lee, and Y. Liu, “Design concept and kinematic analysis of a compliant anatomical palm mechanism for bio-inspired robotic hand design,” Int J Intell Robot Appl, 2025, doi: 10.1007/s41315-024-00415-1.
A. Mohammadi et al., “A practical 3D-printed soft robotic prosthetic hand with multi-articulating capabilities,” PLoS One, vol. 15, no. 5, May 2020, doi: 10.1371/journal.pone.0232766.
M. B. Schäfer, J. G. Meiringer, J. Nawratil, L. Worbs, G. A. Giacoppo, and P. P. Pott, “Estimating Gripping Forces During Robot- Assisted Surgery Based on Motor Current,” Current Directions in Biomedical Engineering, vol. 8, no. 1, pp. 105–108, Jul. 2022, doi: 10.1515/cdbme-2022-0027.
Xiaoguang Zhang, Taoyuanmin Zhu, Itsui Yamayoshi, and Dennis Hong, “A Force Controlled Under Actuated Robotic Hand with Mechanical Intelligence and Proprioceptive Compliant Actuationa,” in IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China: IEEE, Nov. 2018.
D. H. Lee, J. H. Park, S. W. Park, M. H. Baeg, and J. H. Bae, “KITECH-Hand: A Highly Dexterous and Modularized Robotic Hand,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 2, pp. 876–887, Apr. 2017, doi: 10.1109/TMECH.2016.2634602.
A. Ajoudani et al., “Exploring teleimpedance and tactile feedback for intuitive control of the pisa/IIT soft hand,” IEEE Trans Haptics, vol. 7, no. 2, pp. 203–215, 2014, doi: 10.1109/TOH.2014.2309142.
Yi Zhangl, Li Chu, Wendi Zhuo, and Hua Deng, “Grasping Force Control Preventing Excessive Deformation for underactuated Prosthetic Hands,” in 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China: IEEE, Oct. 2016. doi: 10.1109/IMCEC.2016.7867518.
J. Falco, K. Van Wyk, and E. Messina, “Performance Metrics and Test Methods for Robotic Hands,” Oct. 31, 2018. doi: 10.6028/NIST.SP.1227-draft.
N. Dechev, W. L. Cleghorn, and S. Naumann, “Multiple finger, passive adaptive grasp prosthetic hand,” Mech Mach Theory, vol. 36, no. 10, pp. 1157–1173, 2001, doi: 10.1016/S0094-114X(01)00035-0.
“Actuonix L12-30-100-12-P.” Accessed: Mar. 22, 2025. [Online]. Available: https://www.actuonix.com/l12-30-100-12-p
“Actuonix PQ12-63-12-P.” Accessed: Mar. 22, 2025. [Online]. Available: https://www.actuonix.com/pq12-63-12-p
“FSR Sensor, Force Sensing Resistor | Interlink Electronics.” Accessed: Mar. 22, 2025. [Online]. Available: https://www.interlinkelectronics.com/force-sensing-resistor
“Execute Real-Time Application in Simulink External Mode by Using Step-by-Step Commands.” Accessed: Mar. 22, 2025. [Online]. Available: https://la.mathworks.com/help/slrealtime/gs/execute-real-time-application-in-external-mode-with-step-by-step.html
“SparkFun Motor Driver - Dual TB6612FNG.” Accessed: Mar. 22, 2025. [Online]. Available: https://www.sparkfun.com/sparkfun-motor-driver-dual-tb6612fng-1a.html
“Adafruit INA219 Current Sensor Breakout | Adafruit Learning System.” Accessed: Mar. 22, 2025. [Online]. Available: https://learn.adafruit.com/adafruit-ina219-current-sensor-breakout/overview
K. Watanabe, M. Kouzaki, M. Ogawa, H. Akima, and T. Moritani, “Relationships between muscle strength and multi-channel surface EMG parameters in eighty-eight elderly,” European Review of Aging and Physical Activity, vol. 15, no. 1, pp. 1–10, 2018, doi: 10.1186/s11556-018-0192-z.
E. D. Engeberg and S. G. Meek, “Adaptive sliding mode control for prosthetic hands to simultaneously prevent slip and minimize deformation of grasped objects,” IEEE/ASME Transactions on Mechatronics, vol. 18, no. 1, pp. 376–385, 2013, doi: 10.1109/TMECH.2011.2179061.
M. M. Rayguru, M. R. Elara, B. F. Gomez, and B. Ramalingam, “A Time Delay Estimation Based Adaptive Sliding Mode Strategy for Hybrid Impedance Control,” IEEE Access, vol. 8, pp. 155352–155361, 2020, doi: 10.1109/ACCESS.2020.3019429.