Design and Computational Modeling of a Leg-Wheel Transformable Mechanism with Decoupled Kinematics
Keywords:
Transformable mechanisms, kinematics, neural networks, mobile roboticsAbstract
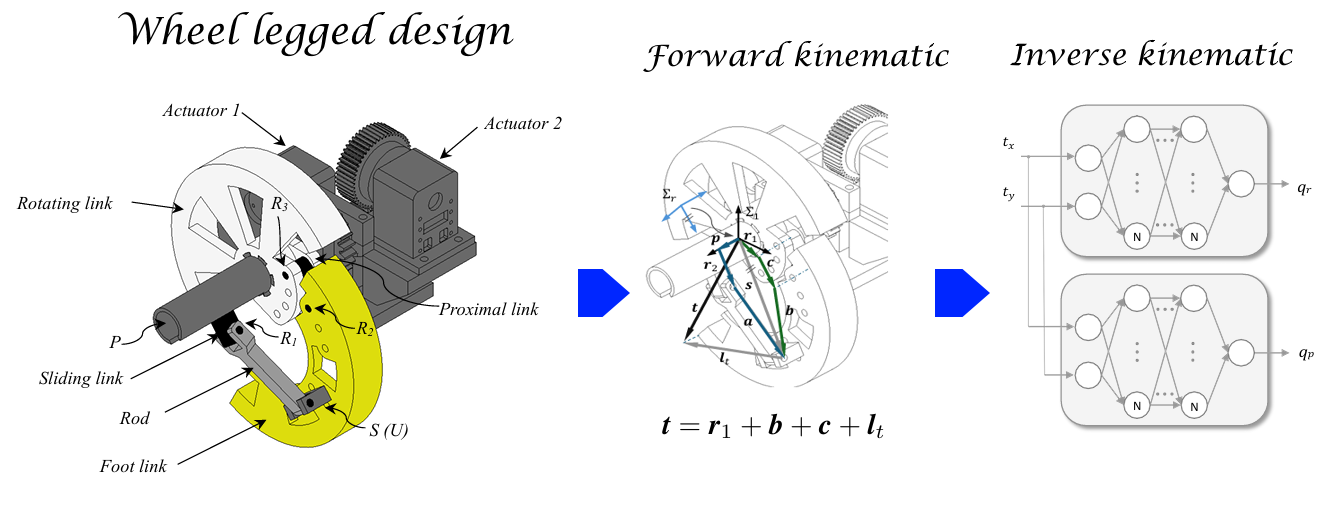
This paper presents the design of a novel leg-wheel transformable mechanism. The purpose of this mechanism is to combine the efficiency of wheeled locomotion with the ability of the legs to traverse difficult terrain. The mechanism has two degrees of freedom with decoupled kinematics. The decoupled kinematics of the mechanism allows the rotation and extension/flexion motions to be controlled independently by a pair of actuators, which provides some advantages. In this work, the direct kinematics of the mechanism is solved analytically. On the other hand, due to the complexity of the inverse kinematics, two different numerical methods were evaluated for solving this problem. A model based on neural networks was successfully implemented in a physical prototype to generate the trajectory of a gait cycle in the leg mode of the mechanism.
Downloads
References
L. Bruzzone and G. Quaglia, “Review article: locomotion systems for ground mobile robots in unstructured environments,” Mechanical Sciences, vol. 3, pp. 49–62, 07 2012, doi: https://doi.org/10.5194/ ms-3-49-2012.
R. Siegwart, I. Nourbakhsh, and D. Scaramuzza, Introduction to Au tonomous Mobile Robots 2nd Edition. MIT Press, 2011, iSBN: 9780262295093.
D. Lu, E. Dong, C. Liu, M. Xu, and J. Yang, “Design and development of a leg-wheel hybrid robot “hytro-i”,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, pp. 6031–6036, doi: https://doi.org/10.1109/IROS.2013.6697232.
G. Qiao, G. Song, Y. Zhang, J. Zhang, and Z. Li, “A wheel-legged robot with active waist joint: Design, analysis, and experimental result,” Journal of Intelligent and Robotic Systems, vol. 83, pp. 485–502, 2016, dOI: https://doi.org/10.1007/s10846-015-0303-2.
R. Siegwart, P. Lamon, T. Estier, L. Lauria, and R. Piguet, “Innova tive design for wheeled locomotion in rough terrain,” Robotics and Autonomous Systems.ISSN 0921-8890, vol. 40, pp. 151–162, 2002, doi: https://doi.org/10.1016/S0921-8890(02)00240-3.
F. Cordes, A. Dettmann, and F. Kirchner, “Locomotion modes for a hybrid wheeled-leg planetary rover,” in 2011 IEEE International Conference on Robotics and Biomimetics, 2011, pp. 2586–2592, dOI: https://doi.org/10.1109/ROBIO.2011.6181694.
R. Quinn, J. Offi, D. Kingsley, and R. Ritzmann, “Improved mobility through abstracted biological principles,” vol. 3, 02 2002, pp. 2652 2657 vol.3, doi: https://doi.org/10.1109/IRDS.2002.1041670.
M. Eich, F. Grimminger, and F. Kirchner, “A versatile stair-climbing robot for search and rescue applications,” in 2008 IEEE International Workshop on Safety, Security and Rescue Robotics, 2008, pp. 35–40, doi: https://doi.org/10.1109/SSRR.2008.4745874.
J. L. Ordo˜nez-Avila, H. A. Moreno, M. E. Perdomo, and I. G. C. Calder´ on, “Designing legged wheels for stair climbing,” Symmetry, vol. 15, no. 11, 2023, doi: https://doi.org/10.3390/sym15112071.
I. T. Burt and N. P. Papanikolopoulos, “Adjustable diameter wheel assembly, and methods and vehicles using same,” US 6860346, 2005.
Y. Lin, H. Lin, and P. Lin, “Slip-model-based dynamic gait generation in a leg-wheel transformable robot with force control,” IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 804–810, April 2017, doi: https://doi.org/10.1109/LRA.2017.2653363.
H. Moreno, I. Carrera, J. P. Garc´ ıa, and J.Baca, “Heise wheels: a family of mechanisms for implementing variable geometry hybrid wheels,” Revista Iberoamericana de Autom´atica e Inform´atica industrial, vol. 15, no. 4, 2018, dOI: https://doi.org/10.4995/riai.2017.8798.
K. Tadakuma, R. Tadakuma, A. Maruyama, E. Rohmer, K. Nagatani, K. Yoshida, A. Ming, M. Shimojo, M. Higashimori, and M. Kaneko, “Mechanical design of the wheel-leg hybrid mobile robot to realize a large wheel diameter,” in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010, pp. 3358–3365, dOI: https: //doi.org/10.1109/IROS.2010.5651912.
P. Lin and S. Shen, “Mobile platform,” US 8307923 B2, 2012.
H.-Y. Chen, T.-H. Wang, K.-C. Ho, C.-Y. Ko, P.-C. Lin, and P.-C. Lin, “Development of a novel leg-wheel module with fast transformation and leaping capability,” Mechanism and Machine Theory, vol. 163, p. 104348, 2021, doi: https://doi.org/10.1016/j.mechmachtheory.2021. 104348.
Y. Xue, X. Yuan, Y. Wang, Y. Yang, S. Lu, B. Zhang, J. Lai, J. Wang, and X. Xiao, “Lywal: a leg-wheel transformable quadruped robot with picking up and transport functions,” 05 2021, pp. 2935–2941, doi: https: //doi.org/10.1109/ICRA48506.2021.9561128.
H. A. Moreno, “Kinematic analysis of a novel leg-wheel transformable mechanism,” in Advances in Automation and Robotics Research, M. N. Cardona, J. Baca, C. Garcia, I. G. Carrera, and C. Martinez, Eds. Cham: Springer Nature Switzerland, 2024, pp. 46–55, doi: https://doi.org/10.1007/978-3-031-54763-85.
R. A. et al., “Rhex: A biologically inspired hexapod runner,” Auton. Robots, vol. 11, no. 2, pp. 207–2013, 2001, doi: https://doi.org/10.1023/A:1012426720699.
L. Puglisi, R. Saltaren, C. Garcia Cena, P.-F. Cardenas, and H. Moreno Avalos, “Implementation of a generic constraint function to solve the direct kinematics of parallel manipulators using newton raphson approach,” Control Engineering and Applied Informatics, vol. 19, pp. 71–79, 01 2017.
A.-V. Duka, “Neural network based inverse kinematics solution for trajectory tracking of a robotic arm,” 2014, dOI: https://doi.org/10.1016/j.protcy.2013.12.451.
H. Sadjadian and H. Taghirad, “Comparison of different methods for computing the forward kinematics of a redundant parallel manipulator,” Journal of Intelligent and Robotic Systems, vol. 44, pp. 225–246, 11 2005, doi: https://doi.org/10.1007/s10846-005-9006-4.
A. Zubizarreta, M. Larrea, E. Irigoyen, I. Cabanes, and E. Portillo, “Real time direct kinematic problem computation of the 3prs robot using neural networks,” Neurocomputing, vol. 271, pp. 104–114, 2018, doi: https://doi.org/10.1016/j.neucom.2017.02.098.
J. F. Flores, H. A. Moreno, I. G. Carrera, M. A. Garcia, and R. G. Adan, “Inverse kinematics of a rsrr heise wheel using neural networks,” in 2021 XXIII Robotics Mexican Congress (ComRob), 2021, pp. 19–24, doi: https://doi.org/10.1109/ComRob53312.2021.9628728.