Development of an Omnidirectional Modular Robot
Keywords:
Omnidirectional robot, Modular robot, Mobile robot, Kinematics, Mecanum wheelsAbstract
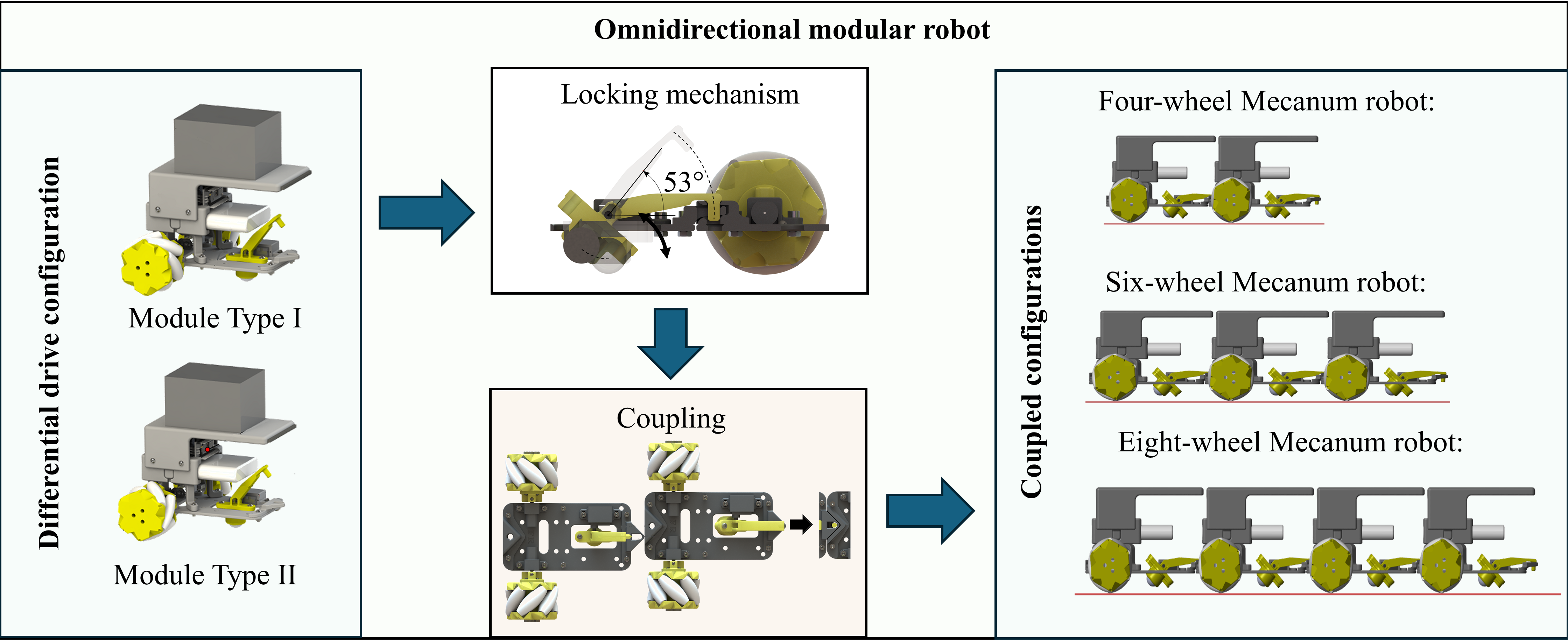
The concept of modularity in mobile robots has been aimed to enhance their capabilities, including functionality, adaptability, or robustness. However, modularity often involves the complex design of robotic modules. In this context, this paper introduces the development of a reconfigurable modular mobile robot in differential drive configuration, which main advantage is the generation of an omnidirectional mobile robot when at least two modules are coupled, in consequence, mobility and load capacity are increased. Each robotic module comprises a frame, two Mecanum wheels, a controller, and an active connection mechanism designed to simultaneously perform two functions: 1) locking a module-to-module connection, and 2) automatic reconfiguration of the robot's architecture by lifting a freely rotating spherical wheel. Owing to the integration of Mecanum wheels, the kinematic analysis of differential drive configuration considers the influence of a rollers' angles relative to the robot frame, allowing the model to be extended to a system with $n$ coupled modules. To validate the kinematic models, a multibody simulation was conducted using Simscape Multibody Link\textsuperscript{TM}. Finally, a prototype is presented to showcase the modularity capability, including the docking and undocking process, as well as the omnidirectional mobility, even in the presence of backlash.
Downloads
References
H. Ahmadzadeh, E. Masehian, and M. Asadpour, "Modular Robotic Systems: Characteristics and Applications," textit{J. Intell. Robot. Syst.}, vol. 81, pp. 317--357, 2016. doi: https://doi.org/10.1007/s10846-015-0237-8.
M. Yim, W. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, and G. S. Chirikjian, "Modular Self-Reconfigurable Robot Systems: Grand Challenges of Robotics," textit{IEEE Robot. Autom. Mag.}, vol. 14, no. 1, pp. 43--52, 2007. DOI: https://doi.org/10.1109/MRA.2007.339623.
G. Mourioux, C. Novales, G. Poisson, and P. Vieyres, "Omni-directional robot with spherical orthogonal wheels: concepts and analyses," in textit{Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006)}, Orlando, FL, USA, 2006, pp. 3374--3379. DOI: https://doi.org/10.1109/ROBOT.2006.1642217.
M. Hofbaur, M. Brandstötter, S. Jantscher, and C. Schörghuber, "Modular re-configurable robot drives," in textit{IEEE Conference on Robotics, Automation and Mechatronics}, Singapore, 2010. pp. 150--155, DOI: 10.1109/RAMECH.2010.5513196.
M. O. Tu{a}tar and C. I. Cirebea, "Modular Reconfigurable Robots," in textit{New Advances in Mechanism and Machine,} in textit{Science}, I. Doroftei, C. Oprisan, D. Pisla, and E. C. Lovasz, Eds., vol. 57. Cham, Switzerland: Springer, 2018, pp. 291--299. doi: https://doi.org/10.1007/978-3-319-79111-129.
Z. Liu, M. Yue, L. Guo, and Y. Zhang, "Trajectory planning and robust tracking control for a class of active articulated tractor-trailer vehicle with on-axle structure," textit{Eur. J. Control}, vol. 54, pp. 87--98, 2020. doi: https://doi.org/10.1016/j.ejcon.2019.12.003
J. D. Davis, Y. Sevimli, B. R. Eldridge, and G. S. Chirikjian, "Module Design and Functionally Non-Isomorphic Configurations of the Hex-DMR II System," textit{ASME J. Mech. Robot.}, vol. 8, no. 5, 2016. doi: https://doi.org/10.1115/1.4032273.
J. D. Davis, Y. Sevimli, M. Kendal Ackerman, and G. S. Chirikjian, "A Robot Capable of Autonomous Robotic Team Repair: The Hex-DMR II System," in textit{Advances in Reconfigurable Mechanisms and Robots II}, X. Ding, X. Kong, and J. S. Dai, Eds. Cham, Switzerland: Springer, 2016, pp. 619--631. doi: https://doi.org/10.1007/978-3-319-23327-7_53.
R. H. Peck, J. Timmis, and A. M. Tyrrell, "Omni-Pi-tent: An Omnidirectional Modular Robot With Genderless Docking," in textit{Towards Autonomous Robotic Systems}, K. Althoefer, J. Konstantinova, and K. Zhang, Eds. Cham, Switzerland: Springer, 2019, pp. 307--318. doi: https://doi.org/10.1007/978-3-030-25332-5_27.
Y. Li, S. Dai, L. Zhao, X. Yan, and Y. Shi, "Topological Design Methods for Mecanum Wheel Configurations of an Omnidirectional Mobile Robot," textit{Symmetry}, vol. 11, no. 10, 2019. doi: https://doi.org/10.3390/sym11101268.
Y. Li, S. Ge, S. Dai, L. Zhao, X. Yan, Y. Zheng, and Y. Shi, "Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation," textit{Sensors}, vol. 20, no. 1, 2020. doi: https://doi.org/10.3390/s20010075.
R. Pasumarthi, S.M.B.P. Samarakoon and M.R. Elara, "Determining optimum assembly zone for modular reconfigurable robots using multi-objective genetic algorithm," textit{Sci. Rep.}, vol. 15, pp. 1--12. 2025. doi: https://doi.org/10.1038/s41598-024-84637-0.
C. He, D. Wu, K. Chen, F. Liu, and N. Fan, "Analysis of the Mecanum wheel arrangement of an omnidirectional vehicle," in textit{Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science}, vol. 233, no. 15, pp. 5329--5340, 2019. doi: https://doi.org/10.1177/0954406219843568.
G.-n. Li, M. Zeng, Y. Ma, Q. Li, and W.-k. Xu, "Design of Double-Body Car-Snake Hybrid Transformable Robot," in textit{39th Chinese Control Conference (CCC)}, Shenyang, China, 2020. DOI: https://doi.org/10.23919/CCC50068.2020.9188511.
W. Cheah, K. Groves, H. Martin, H. Peel, S. Watson, O. Marjanovic, and B. Lennox, "MIRRAX: A Reconfigurable Robot for Limited Access Environments," textit{IEEE Trans. Robot.}, vol. 39, no. 2, pp. 1341--1352, 2022. doi: https://doi.org/10.1109/TRO.2022.3207095.
M. Chi, S. Chang, S. Cui, Z. Li, J. Li, Z. Xia, Q. Ren, "Deformation Mechanism and Design of an Omni-directional Mobile Reconfigurable Robot," in textit{2024 9th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS)}, Dalian, China, 2024, pp. 166-170, doi: 10.1109/ACIRS62330.2024.10684923.
D. N. Zakharov, A. M. Iaremenko, D. M. Kurovskii, A. M. Kurovskii, O. I. Borisov and B. Zhang, "Development of a Mobile Reconfigurable Mecanum Robot with a Locking Device of Rollers," in textit{2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, Abu Dhabi, United Arab Emirates, 2024, pp. 3553-3558, doi: 10.1109/IROS58592.2024.10801549.
Z. Zhao, P. Xie, J. Wang and M.Q.H. Meng, "ODD: Omni Differential Drive for Simultaneous Reconfiguration and Omnidirectional Mobility of Wheeled Robots," textit{IEEE Robot. Autom. Let.}, vol. 10, no. 6, pp. 5975-5982, 2025, doi: 10.1109/LRA.2025.3564207
R. Parween, M. Vega-Heredia, M.M. Rayguru, R.E. Abdulkader, M.R. Elara, "Autonomous Self-Reconfigurable Floor Cleaning Robot," textit{IEEE Access}, vol. 8, pp. 114433--114442. doi: https://doi.org/10.1109/ACCESS.2020.2999202.
E. Karamipour, S. F. Dehkordi, and M. H. Korayem, "Reconfigurable Mobile Robot with Adjustable Width and Length: Conceptual Design, Motion Equations and Simulation," textit{J. Intell. Robot. Syst.}, vol. 99, pp. 797--814, 2020. doi: https://doi.org/10.1007/s10846-020-01163-7.
{it{KUKA omniMove}}. KUKA® AG. [Online]. Available: https://www.kuka.com/es-mx/productos-servicios/amr-robotica-movil-autonoma/plataformas-m%C3%B3viles/kuka-omnimove
A. Rauniyar, H. C. Upreti, A. Mishra, and P. Sethuramalingam, "MeWBots: Mecanum-Wheeled Robots for Collaborative Manipulation in an Obstacle-Clustered Environment Without Communication," textit{J. Intell. Robot. Syst.}, vol. 102, no. 3, pp. 1--18, 2021. doi: https://doi.org/10.1007/s10846-021-01359-5.
E. Tuci, M. H. Alkilabi, and O. Akanyeti, "Cooperative Object Transport in Multi-Robot Systems: A Review of the State-of-the-Art," textit{Front. Robot. AI}, vol. 5, p. 59, 2018. doi: https://doi.org/10.3389/frobt.2018.00059.
Z. Wang, G. Yang, X. Su, and M. Schwager, "OuijaBots: Omnidirectional Robots for Cooperative Object Transport with Rotation Control Using No Communication," in textit{Distributed Autonomous Robotic Systems: The 13th International Symposium}, R. Gro{ss}, A. Kolling, S. Berman, E. Frazzoli, A. Martinoli, F. Matsuno, and M. Gauci, Eds. Cham, Switzerland: Springer, 2018, pp. 117--131. doi: https://doi.org/10.1007/978-3-319-73008-0_9.
P. Paniagua-Contro, E. G. Hernandez-Martinez, O. González-Medina, J. González-Sierra, J. J. Flores-Godoy, E. D. Ferreira-Vazquez, and G. Fernandez-Anaya, "Extension of Leader-Follower Behaviours for Wheeled Mobile Robots in Multirobot Coordination," textit{Math. Probl. Eng.}, vol. 2019, 2019. doi: https://doi.org/10.1155/2019/4957259
S. G. M. Hossain, C. A. Nelson, K. D. Chu, and P. Dasgupta, "Kinematics and Interfacing of ModRED: A Self-Healing Capable, 4DOF Modular Self-Reconfigurable Robot," textit{J. Mech. Robot.}, vol. 6, no. 4, 2014. doi: https://doi.org/10.1115/1.4028132
M. D. M. Kutzer, M. S. Moses, C. Y. Brown, M. Armand, D. H. Scheidt, and G. S. Chirikjian, "Design of a new independently-mobile reconfigurable modular robot," in textit{2010 IEEE International Conference on Robotics and Automation}, Anchorage, AK, USA, 2010, pp. 2758--2764. doi: 10.1109/ROBOT.2010.5509726.
A. Castano, A. Behar, and P. M. Will, "The Conro modules for reconfigurable robots," textit{IEEE-ASME Trans. Mechatron.}, vol. 7, no. 4, pp. 403--409, 2002. doi: https://doi.org/10.1109/TMECH.2002.806233.
P. M. Moubarak and P. Ben-Tzvi, "On the Dual-Rod Slider Rocker Mechanism and Its Applications to Tristate Rigid Active Docking," textit{J. Mech. Robot.}, vol. 5, no. 1, 2013. doi: https://doi.org/10.1115/1.4023178.
T. Hamid, Q. Bing, and G. Nurallah, "Kinematic model of a four Mecanum wheeled mobile robot," textit{Int. J. Comput. Appl.}, vol. 113, no. 3, 2015. doi: http://dx.doi.org/10.5120/19804-1586.