Soft Constrained Warm Start based MPC-PD Approach for Real Time Control of Underactuated Systems
Keywords:
Model predictive control, Nonlinear system, Warm startAbstract
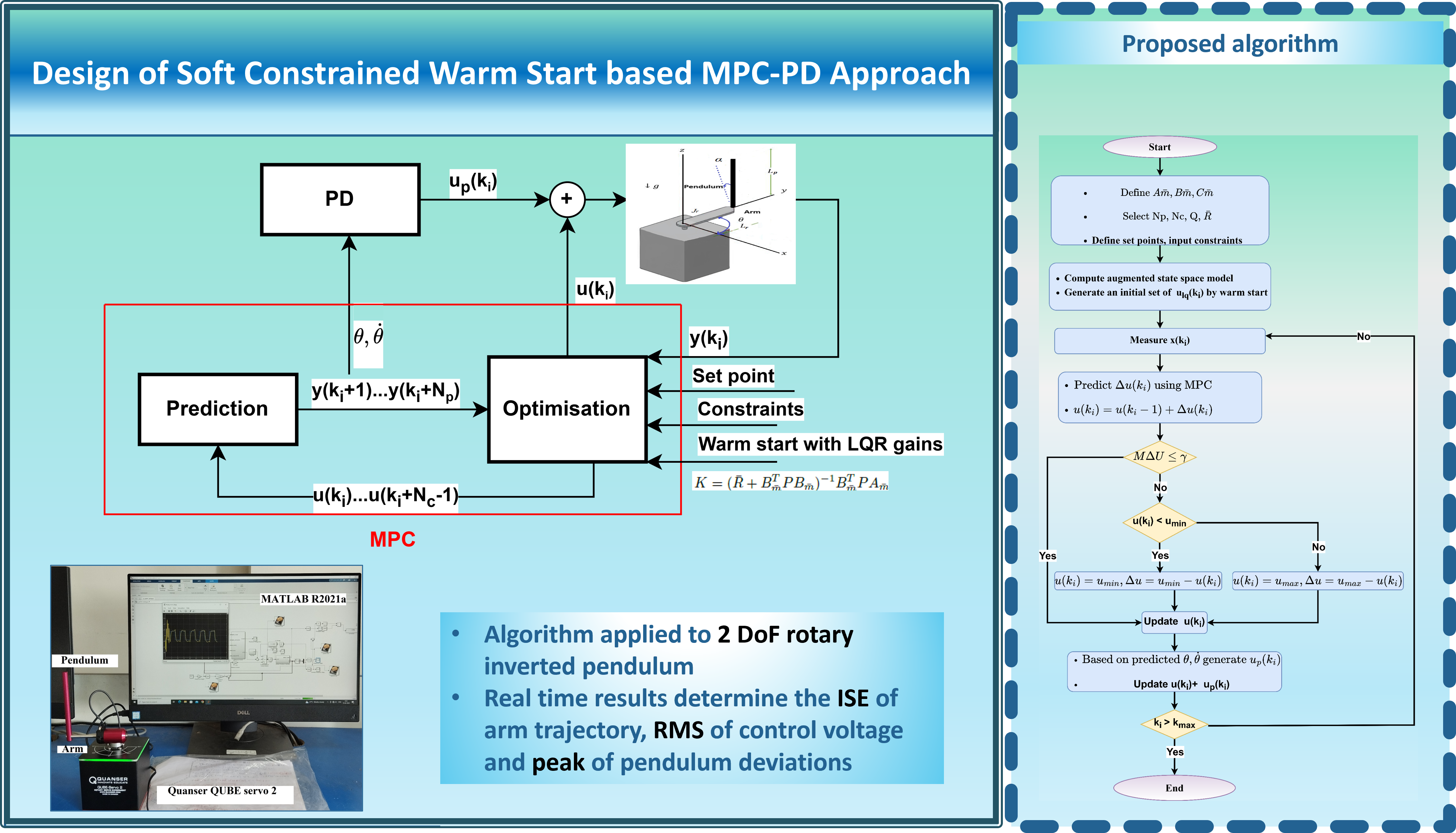
Controller design for unstable underactuated systems has predominantly focused on fixed value control strategies. However, integrating the benefits of fixed value control with predictive control approaches remains a relatively under explored area for such systems. This article introduces a real time dual control strategy that combines Proportional Derivative (PD) control and Model Predictive Control (MPC) methods. The MPC uses a warm start and anticipates the future actuator movements, without constraint violation. The PD control provides an inner velocity control loop to reduce oscillations. By state augmentation, quadratic optimisation is implemented to find the optimum solution without violating the constraints. The proposed strategy has been implemented in real time on a rotary inverted pendulum system, designed to guide the arm along a trajectory while maintaining the pendulum upright. A comparative experimental study is conducted on this benchmark system, evaluating the proposed dual controller against a conventional MPC, with the proposed controller achieving better performance.
Downloads
References
Carlos Aguilar Avelar, Javier Moreno Valenzuela, ”A composite controller for trajectory tracking applied to the Furuta pendulum”, ISA Transactions, vol. 57, pp. 286-294, 2015. DOI: 10.1016/j.isatra.2015.02.009.
M. Ramirez Neria, H.Sira Ramirez, R.Garrido Moctezuma, A.Luviano Juarez, ”Linear active disturbance rejection control of underactuated systems: The case of the Furuta pendulum”, ISA Transactions, vol. 53,no. 4, pp. 920-928, 2014. DOI: 10.1016/j.isatra.2013.09.023 .
Carlos Aguilar Avelar, Javier Moreno Valenzuela, ”New Feedback Linearization-Based Control for Arm Trajectory Tracking of the Furuta Pendulum”, IEEE/ASME Transactions on Mechatronics, vol. 21, no. 2,
pp. 638-648, 2016. DOI: 10.1109/TMECH.2015.2485942.
Shahzad A., Munshi S., Azam S. and Nasir Khan M., ”Design and implementation of a state-feedback controller using LQR Technique”, Computers, Materials & Continua, vol. 73, no. 2, pp.2897-2911, 2022.
DOI: 10.32604/cmc.2022.028441.
Waszak M. and Langowski R., ”An automatic self-tuning control system design for an inverted pendulum”, IEEE Access, vol. 8, pp.26726-26738, 2020. DOI: 10.1109/ACCESS.2020.2971788.
Ioannis Sarras, Houria B. Siguerdidjane, Romeo Ortega, ”Stabilization of the experimental cart-pendulum system with proven domain of attraction”, European Journal of Control, vol. 16, no. 4, pp.329-340, 2010. DOI:10.3166/ejc.16.329-340.
Emese Kennedy, Etan King, Hien Tran, ”Real-time implementation and analysis of a modified energy based controller for the swing-up of an inverted pendulum on a cart”, European Journal of Control, vol. 50, pp.176-187, 2019. DOI: 10.1016/j.ejcon.2019.05.002.
Sen M.A. and Kalyoncu M., ”Optimal tuning of a LQR controller for an inverted pendulum using the bees algorithm”, Journal of Automation and Control Engineering, vol. 4, no. 5, pp. 384-387, 2016. DOI:
18178/joace.4.5.384-387.
Gavtham Hari Kumar B, Vimal E, ”Adaptive Dynamic Programming Based Linear Quadratic Regulator Design for Rotary Inverted Pendulum System”, Volatiles & Essential Oils, vol. 8, no. 5, pp. 3221-3241, 2021. https://api.semanticscholar.org/CorpusID:262051062
Franklin G.F., J. David Powell and Workman M.L., Digital control of dynamic systems, Addison-Wesley, 1990. urn : lcp :digitalcontrolof0000franm9e5 : lcpdf : ac0ad1fd−90c2−489e−9f3f − 4c9f077ffb06.
Aguilar Ibanez, C. and Hebertt Sira Ram´ırez, ”A Linear Differential Flatness Approach to Controlling the Furuta Pendulum”, IMA Journal of Mathematical Control and Information, vol. 24, no. 1, pp. 31-45, 2007.
DOI: 10.1093/imamci/dnl005.
Prasad L.B., Tyagi B. and Gupta H.O., ”Optimal control of nonlinear inverted pendulum system using PID controller and LQR: Performance analysis without and with disturbance Input”, International Journal of Automation and Computing, vol. 11, no. 6, pp. 661-670, 2014. DOI:10.1007/s11633-014-0818-1.
Enrico Franco, Alessandro Astolfi, ”Energy shaping control of a class of underactuated mechanical systems with high-order actuator dynamics”, European Journal of Control, vol. 72, 2023. DOI: 10.1016/j.ejcon.2023.100828.
Dubljevic S. and Humaloja J., ”Model predictive control for regular linear systems”, Automatica, 119, 2020. DOI:10.1016/j.automatica.2020.109066.
Ding J., Han L., Ge L., Liu Y. and Pang J., ”Robust locomotion exploiting multiple balance strategies: An observer-based cascaded model predictive control approach”, IEEE-ASME Transactions on Mechatronics, vol. 27, no. 4, pp. 2089-2097, 2022. DOI:10.1109/TMECH.2022.3173805.
Messikh L., Guechi E.H. and Blazic, S., ”Stabilization of the cart inverted pendulum system using state feedback pole independent MPC controllers”, Sensors, vol. 22, no. 1, pp. 243, 2021. DOI: 10.3390/s22010243.
A. A. Adegbege, ”Constrained continuous-time dynamics for linear model predictive control”, IEEE Control Systems Letters, vol. 6, pp. 3098- 3103, 2022. DOI: 10.1109/LCSYS.2022.3180890.
A. Nazerian, F. Vides and F. Sorrentino, ”Algebraic decomposition of model predictive control problems”, IEEE Control Systems Letters, vol. 7, pp. 1441-1446, 2023. DOI: 10.1109/LCSYS.2023.3252162.
Gayathri S Menon, Vinopraba T, Lithika J, Kannan S, ”Convex optimization based real time predictive control using a novel warm start technique”, IFAC-PapersOnLine, vol. 57, no. 6, pp.71-76, 2024. DOI:
1016/j.ifacol.2024.05.013.
Lukas Schwenkel, Meriem Gharbi, Sebastian Trimpe, Christian Ebenbauer, ”Online learning with stability guarantees: A memory-based warm starting for real-time MPC”, Automatica, 2020. DOI:
1016/j.automatica.2020.109247.
Xuebo Zhang, Yongchun Fang and Ning Sun, ”Minimum-time trajectory planning for underactuated overhead crane systems with state and control constraints”, IEEE Transactions on Industrial Electronics, vol. 61, no. 12, 2014. DOI: 10.1109/TIE.2014.2320231.
Aurelio Piazzi and Antonio Visioli, ”Minimum time system inversion based motion planning for residual vibration reduction”, IEEE/ASME Transactions on Mechatronics, vol. 5, no. 1, March 2000.
DOI:10.1109/3516.828585.
William Singhose, ”Command shaping for flexible systems: A review of the first 50 years”, International Journal of Precision Engineering and Manufacturing, vol. 10, no. 4, pp. 153-168, 2009. DOI:10.1007/s12541-009-0084-2.
Ji-Hwan Shin, Dong-Han Lee and Moon K. Kwak, ”Vibration suppression of cart-pendulum system by combining the input-shaping control and the position-input position-output feedback control”, Journal of Mechanical Science and Technology, pp. 5761-5768, 2019. DOI: 10.1007/s12206- 019-1120-5.
H.M. Omar and A.H. Nayfeh, ”Anti-swing control of gantry and tower cranes using fuzzy and time-delayed feedback with friction compensation”, Shock and Vibration, pp. 73–89, 2005. DOI:10.1155/2005/890127.
Lobna T Aboserre and Ayman A El-Badawy, ”Robust integral sliding mode control of tower cranes”, Journal of Vibration and Control, pp. 1–13, 2020. DOI:10.1177/1077546320938183.
Diantong Liu, Weiping Guo, and Jianqiang Yi, ”GA-based stable control for a class of underactuated mechanical systems”, Proc. of SPIE, vol. 6042, 2005. DOI:10.1117/12.664527.
Mitsubishi Electric Research Laboratories, Inc. (Cambridge, US), ”Concurrent station keeping, attitude control, and momentum management of spacecraft”, US20170269610A, 2017.
Univ Xian Science & Technology, ”Control method of hierarchical structure MPC based multi freedom flexible joint mechanical arm system”, CN109648564A, 2019.
Ahmed Aboelhassan, M. Abdelgeliel, Ezz Eldin Zakzouk and Michael Galea, ”Design and implementation of model predictive control based PID controller for industrial applications”, Energies, vol. 13, 2020. DOI: 10.3390/en13246594.
Sait Sovukluk, Christian Ott, and M. Mert Ankaralı, ”Cascaded model predictive control of underactuated bipedal walking with impact and friction considerations”, IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), 2023. DOI: 10.1109/Humanoids57100.2023.10375153.
Tobias Gold, Andreas Volz, and Knut Graichen, ”Model predictive interaction control for robotic manipulation tasks”, IEEE Transactions on Robotics, vol. 39, no. 1, 2023. DOI:10.1109/TRO.2022.3196607.
Mori S., Nishihara H. and Furuta K., ”Control of unstable mechanical system control of pendulum”, International Journal of Control, vol. 23, no. 5, pp. 673-692, 1976. https://api.semanticscholar.org/CorpusID:119630168.
Karl Johan Astrom., ”Hybrid control of inverted pendulums” in Learning, control and hybrid systems. Lecture Notes in Control and Information Sciences, vol. 241, Springer. DOI: /10.1007/BFb0109727
Astrom K.J. and Furuta K., ”A Swinging up a pendulum by energy control”, Automatica, vol. 36, no. 2, pp.287-295, 2000. DOI:10.1016/S0005- 1098(99)00140-5.
Alamir M., ”From certification of algorithms to certified MPC: The missing links”, IFAC-PapersOnLine, vol. 48, no. 23, pp. 65-72, 2015. DOI:10.1016/J.IFACOL.2015.11.263.
Bemporad A., Bernardini D. and Panagiotis Patrinos, ”A convex feasibility approach to anytime model predictive control”, ArXiv (Cornell University), 2015. DOI: 10.48550/arXiv.1502.07974.
Gayathri S Menon, Vinopraba T, Lithika J, Kannan S, ”Comparative study of linear control strategies for regulation, tracking of unstable systems and the scope for LQR infusion in optimisation problems”,
National Academy Science Letters, 2024. DOI: 10.1007/s40009-024-01588-w.
M. Gopal, Linear quadratic optimal control, in Digital control and state variable methods, vol.222, Tata McGraw Hill Publication, 2017. DOI: 9780071333276,0071333274.
Kailath T, Linear systems, Prentice-Hall, Englewood Cliffs, 1980. DOI:10.1137/1026021.