Design and Simulation of a Sliding Mode Control for Anesthesia
Keywords:
Sliding modes, Propofol, Anesthesia infusion, Infusion pumpAbstract
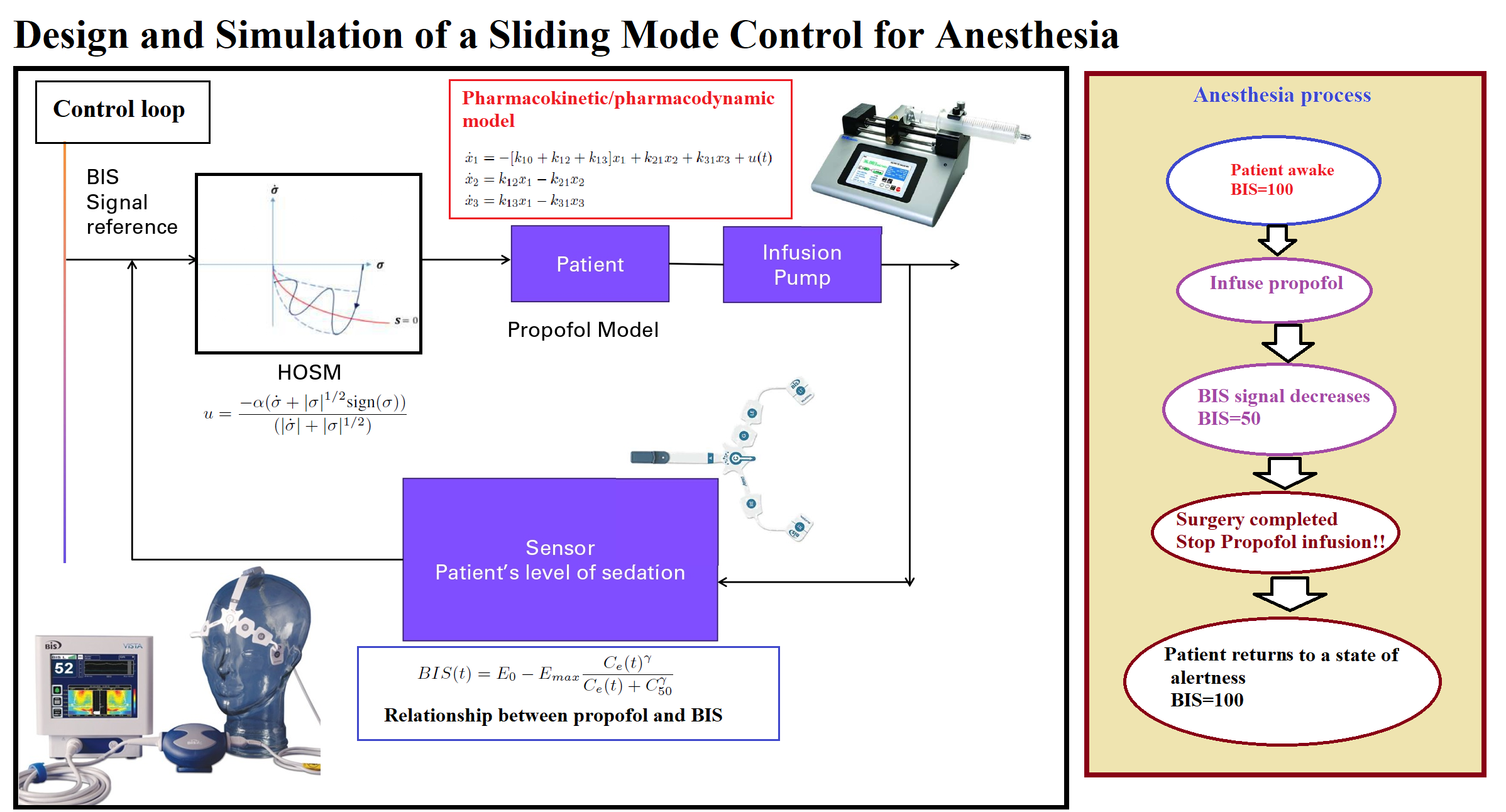
This work presents the automation of the anesthesia infusion process, which allows us to respond quickly, safely and efficiently to possible emergencies that may arise during a surgical intervention. The design of the controller is specific for the infusion of Propofol, which is one of the most used anesthetics. The Higher Order Sliding Mode Control (HOSMC) technique is used, this technique was chosen, since the controller is designed only with the relative degree of the system, its notable characteristic of being insensitive to variations Parametric means that it can have the same efficiency for any patient regardless of the patient's age, sex, weight, height, illness, hydration level, which are important parameters that anesthesiologists consider to calculate the drug dose. Due to the above, its operation is faster compared to that of an anesthesiologist when an accident occurs. HOSMC is a robust controller, since when the patient reaches the desired anesthetic depth, the controller maintains the patient within that level, or within the allowable range even in the presence of surgical perturbations. To simulate the operation of the designed controller, Simulink from Matlab was used, where the controller was programmed.
Downloads
References
A. G. Gallardo-Hernández, A. L. Hernández- Pérez, J. A. Sánchez-López, G. Ordoñez-Espinosa,
S. Islas-Andrade, and C. Revilla-Monsalve, "Monitores de profundidad anestésica," Revista
Mexicana de Anestesiología, vol. 39, no. 3, pp. 201-204, 2016.
(https://www.medigraphic.com/pdfs/rma/cma- 2016/cma163f.pdf)
K. Soltesz, J.-O. Hahn, G. A. Dumont, and J. M. Ansermino, "Individualized PID control of depth
of anesthesia based on patient model identification during the induction phase of anesthesia," in 2011 50th IEEE Conference on
Decision and Control and European Control Conference, 2011: IEEE, pp. 855-860. 10.1109/CDC.2011.6160189
A. L. Hernández Pérez, J. L. Orozco, J. A. S. López, M. G. B. Ochoa, and A. G. Gallardo Hernández,
"Dosis de propofol para sedación para colocación de marcapasos en pacientes geriátricos," Anales Médicos de la Asociación
Médica del Centro Médico ABC, vol. 66, no. 3, pp. 162-168, 2021. 10.35366/101662
C. M. Ionescu, R. De Keyser, B. C. Torrico, T. De Smet, M. M. Struys, and J. E. Normey-Rico,
"Robust predictive control strategy applied for propofol dosing using BIS as a controlled variable
during anesthesia," IEEE Transactions on biomedical engineering, vol. 55, no. 9, pp. 2161- 2170, 2008. 10.1109/TBME.2008.923142
A. Gallardo Hernández, C. R. Monsalve, L. Fridman, R. Leder, S. I. Andrade, and Y. Shtessel,
"Experimental glucose regulation with a high order sliding-mode controller," in 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2012: IEEE, pp. 2056-2059. 10.1109/EMBC.2012.6346363
F. De la Cruz and O. Camacho,
"Controlador de modos deslizantes basado en Predictor de Smith y modelo de segundo orden para procesos con
elevado retardo," Revista Politécnica, vol. 35, no. 2, pp. 18-18, 2015. (https://revistapolitecnica.epn.edu.ec/ojs2/inde x.php/revista_politecnica2/article/view/372)
A. G. Gallardo Hernández et al.,
"Robust control for propofol induced anesthesia based on second-order sliding-mode control," in 52nd IEEE
Conference on Decision and Control, 2013: IEEE, pp. 2864-2869. 10.1109/CDC.2013.6760318 [8] M. A. Gropper et al., Miller's anesthesia. 2020. 10.1097/ALN.0000000000001020
M. B. de Toro, Farmacología para fisioterapeutas. Ed. Médica Panamericana, 2008.
A. Levant, "Quasi-continuous high-order sliding mode controllers," in 42nd IEEE International
Conference on Decision and Control (IEEE Cat. No. 03CH37475), 2003, vol. 5: IEEE, pp. 4605-4610. 10.1109/CDC.2003.1272286
A. Levant and Y. Dvir, "Accelerated high-order MIMO sliding mode control," in 2014 13th International Workshop on Variable Structure Systems (VSS), 2014: IEEE, pp. 1-6. 10.1109/VSS.2014.6881095