Design and Validation of an ABS and TCS Control Strategy Applied in an Automotive Simulator Using Model-Based Design Methodology
Keywords:
Automotive Control Systems, Automotive Simulator, ABS, TCS, Model-Based DesignAbstract
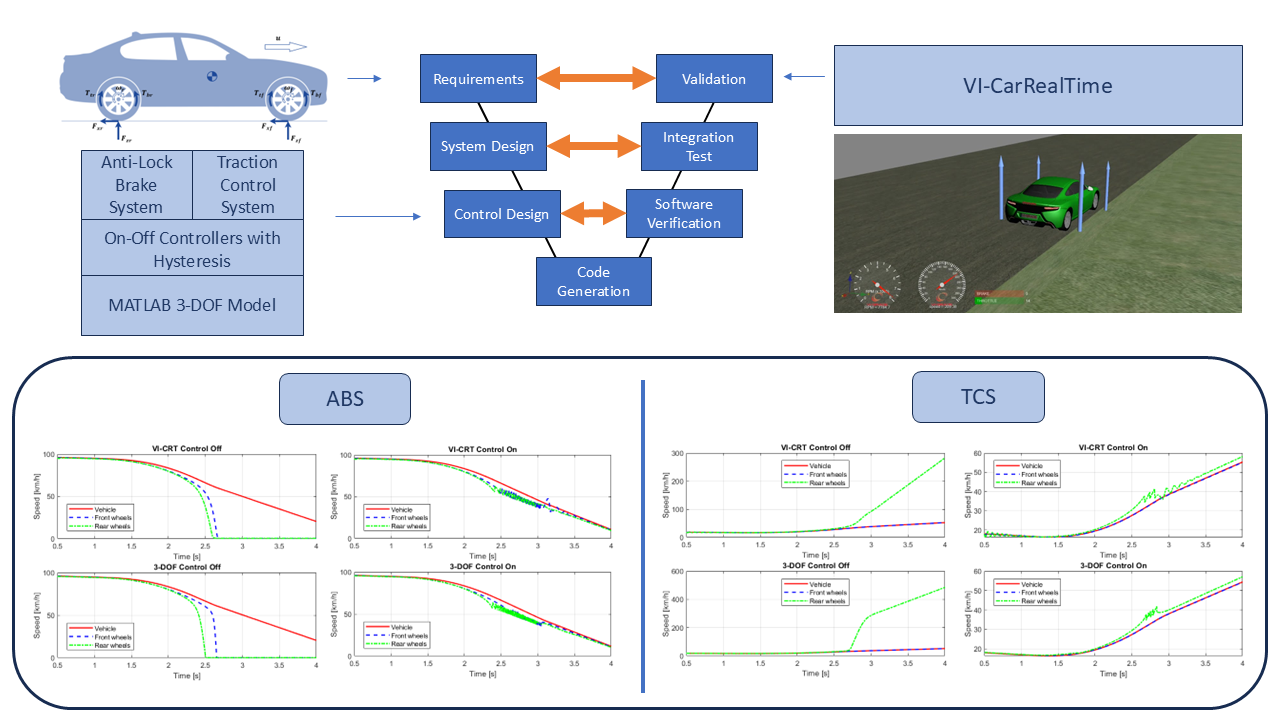
Automotive simulation tools have been employed in various areas of knowledge, especially in the production chain of the automotive industry. The main benefit of these tools consists of reducing the time and product development loops, which directly implies a reduced production cost and improved quality. Thus, the present study aims to use the VI-CarRealTime software widely used in the automotive industry to design and validate ABS and TCS automotive control systems using the ModelBased Design methodology. The simulation results show that the controllers meet the operating requirements well, showing a high correlation when compared to models of a complete vehicle for application in automotive simulators.
Downloads
References
A. Ulsoy, H. Peng, and M. Cakmakci, Automotive Control Systems,
, DOI: 10.1017/CBO9780511844577.
W. F. Milliken and D. L. Milliken, Race Car Vehicle Dynamics, 1st ed.
Commonwealth Drive Warrendale, PA 15096-0001 U.S.A.: SAE
International, 1995.
T. Kelemenova, M. Kelemen, Mikov ´ a, V. Maxim, E. Prada, T. Lipt ´ ak, ´
and F. Menda, “Model based design and hil simulations,” American
Journal of Mechanical Engineering, vol. 1, pp. 276–281, 11 2013, DOI:
12691/ajme-1-7-25.
A. Forrai, Embedded Control System Design: A Model Based Approach,
ser. SpringerLink : Bucher. Springer Berlin Heidelberg, 2012, DOI: ¨
1007/978-3-642-28595-0.
V. grade GmbH, VI - CarRealTime 2021.3 Documentation, 2021.
Z. Wei and G. Xuexun, “An abs control strategy for commercial vehicle,”
IEEE ASME Transactions on Mechatronics, vol. 20, no. 1, pp. 384 –
, February 2015, DOI: 10.1109/TMECH.2014.2322629.
T. Sardarmehni, H. Rahmani, and M. Menhaj, “Robust control of wheel
slip in anti-lock brake system of automobiles,” Nonlinear Dyn, vol. 76,
pp. 125–139, november 2013, DOI: 10.1007/s11071-013-1115-1.
Y. Ma, J. Zhao, H. Zhao, C. Lu, and H. Chen, “Mpc-based slip ratio
control for electric vehicle considering road roughness,” IEEE Access,
April 2019, DOI: 10.1109/ACCESS.2019.2910891.
G. Liu and L. Jin, “A study of coordinated vehicle traction control
system based on optimal slip ratio algorithm,” Mathematical Problems
in Engineering, vol. 2016, June 2016, DOI: 10.1155/2016/3413624.
S. Rajendran, S. Spurgeon, G. Tsampardoukas, and R. Hampson, “Estimation of road frictional force and wheel slip for effective antilock
braking system (abs) control,” Int J Robust Nonlinear Control, vol. 29,
no. 1, pp. 736 – 765, September 2018, DOI: 10.1002/rnc.4366.
S. Saha and S. M. Amrr, “Design of slip-based traction control
system for ev and validation using co-simulation between adams
and matlab/simulink,” Simulation, vol. 96, no. 6, pp. 537–549, 2020.
[Online]. Available: https://doi.org/10.1177/0037549719897834
A. Shaout and S. Pattela, “Model based approach for automotive
embedded systems,” in 2021 22nd International Arab Conference on
Information Technology (ACIT), 2021, pp. 1–7.
B. R. Mudhivarthi, V. Saini, A. Dodia, P. Shah, and R. Sekhar, “Model
based design in automotive open system architecture,” in 2023 7th
International Conference on Intelligent Computing and Control Systems
(ICICCS), 2023, pp. 1211–1216.
A. S. Roque, D. F. Pohren, E. P. Freitas, and C. Pereira, “An approach
to address safety as non-functional requirements in distributed vehicular
control systems,” Journal of Control, Automation and Electrical Systems,
vol. 30, no. 5, pp. 700 – 715, 2019.
M. F. Abdullah, G. A. A. Qasem, M. F. Ramadhan, H. S.
Lim, C. P. Lee, and N. Alsakkaf, “Adaptive control techniques
for improving anti-lock braking system performance in diverse
friction scenarios,” International Journal of Electrical and Computer
Engineering, vol. 15, no. 1, pp. 260–279, 2025. [Online]. Available:
https://ijece.iaescore.com/index.php/IJECE/article/view/36455
Y. Zhang, Y. Wang, Y. Zhang, and Y. Wang, “A wheel slip
ratio constraint control for antilock braking system with external
interferences and state constraints,” Measurement and Control,
vol. 55, no. 9-10, pp. 1202–1210, 2022. [Online]. Available:
https://doi.org/10.1177/00202940221126177
S. Biju, A. Chammam, S. Askar, P. Rodrigues, and M. Jalalnezhad,
“Prediction-based controller radial neural network for the traction
control system,” Journal of Vibration and Control, 2024. [Online].
Available: https://doi.org/10.1177/10775463241296911
S. S. Vaezzadeh, M. M. Rahman, A. G. Chafjiri, and R. K.
Bradley, “A discrete event simulation model of compressive creep
for ldpe,” Results in Engineering, 2025. [Online]. Available: https:
//doi.org/10.1016/j.rineng.2025.103921
H. B. Pacejka, Tyre and Vehicle Dynamics, 2nd ed. Linacre House,
Jordan Hill, Oxford OX2 8DP: Butterworth-Heinemann, 2006, DOI:
1016/C2010-0-68548-8.
Adams, “Using the PAC2002 Tire Model,” online,
accessed 2/22/7, Feb 2022. [Online]. Available: https:
//help.hexagonmi.com/bundle/adams 2021.2/page/adams help/Adams
Car Package/tire/tire models pac2002/tire.models.pac2002.xhtml