A Cooperative Control Approach for Multi-quadrotor Formation in Agricultural Scenarios with Obstacles and External Disturbances
Keywords:
quadrotor, Multi-UAV, Formation control, Adaptive controlAbstract
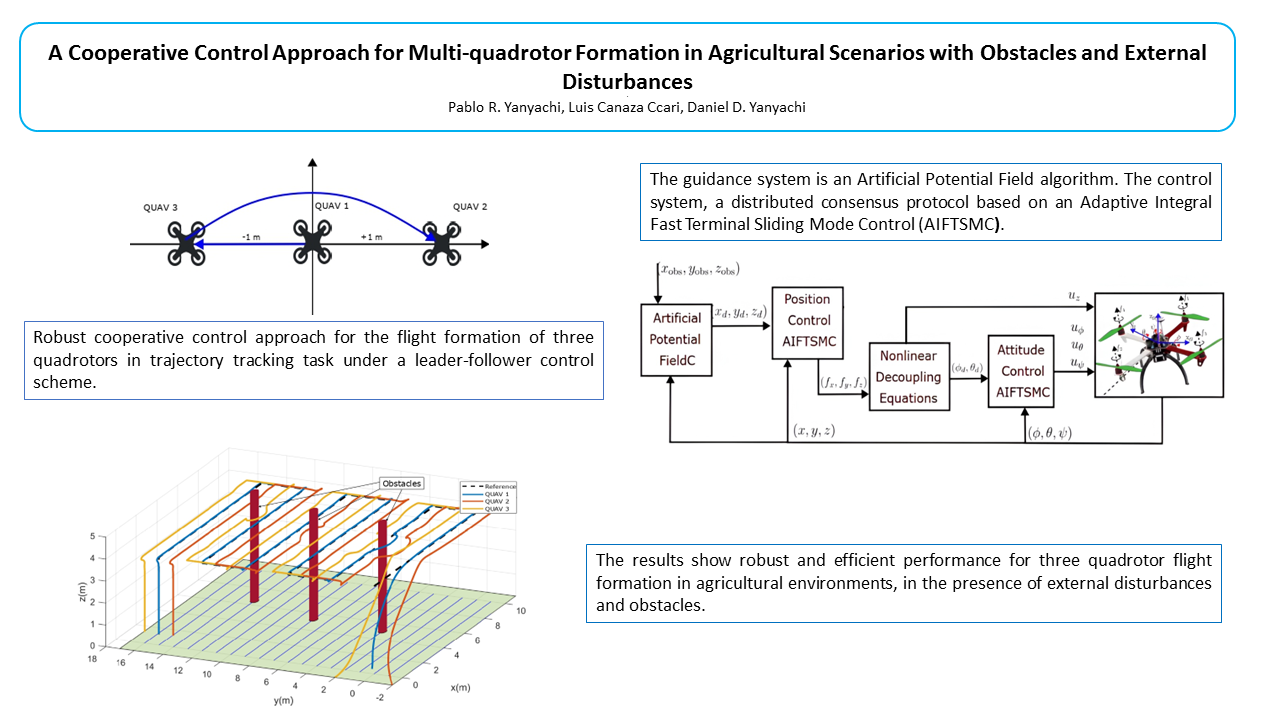
This research aims to develop a robust cooperative control approach for the flight formation of multiple quadrotors in trajectory tracking tasks in agricultural scenarios with obstacles and external disturbances. For this purpose, a distributed autonomous control framework is proposed that integrates a guidance system and an advanced control system for each quadrotor under a leader-follower control scheme. The guidance system employs the Artificial Potential Field (APF) algorithm, which guarantees attraction to the target while avoiding obstacles. For the control system, a distributed consensus protocol based on an Adaptive Integral Fast Terminal Sliding Mode Control (AIFTSMC) is implemented, ensuring fast convergence and robust tracking of the reference trajectory, maintaining the alignment of the quadrotors throughout the entire flight mission. The validity of the proposed approach has been demonstrated through numerical simulations performed in Matlab/Simulink, implementing a representative agricultural scenario. The results show that the approach offers robust and efficient performance for multiple quadrotor flight formation in agricultural environments, even in the presence of external disturbances and obstacles.
Downloads
References
REFERENCES
Santos, S., Givigi, S., Nascimento, C., Fernandes, J., Buonocore, L.
and Almeida Neto, A. “Iterative decentralized planning for collective
construction tasks with quadrotors,” J. Intell. Robot. Syst., vol. 90, pp.
-234, Oct. 2017, doi: 10.1007/s10846-017-0659-6.
Khalil, H., Rahman, S., Ullah, I., Khan, I., Alghadhban, A., Al-Adhaileh,
M., Ali, G. and ElAffendi, M. “A uav-swarm-communication model using
a machine-learning approach for search-and-rescue applications,” Drones,
vol. 6, pp. 12, Nov. 2022, doi: 10.3390/drones6120372.
Chin, R., Catal, C. and Kassahun, A. “Plant disease detection using drones
in precision agriculture,” Precision Agric., vol. 24, pp. 1663-1682, Mar.
, doi: 10.1007/s11119-023-10014-y.
Mogili, U. and Deepak, B. “Review on application of drone systems
in precision agriculture,” Procedia Comput. Sci., vol. 133, pp. 502-509,
, doi: 10.1016/j.procs.2018.07.063.
Rahman, M., Fan, S., Zhang, Y. and Chen, L. “A comparative study on
application of unmanned aerial vehicle systems in agriculture,” Agriculture,
vol. 11, pp. 22, Jan. 2021, doi: 10.3390/agriculture11010022.
Kim, J., Kim, S., Ju, C. and Son, H. “Unmanned aerial vehicles
in agriculture: A review of perspective of platform, control, and applications,”
IEEE Access, vol. 7, pp. 105100-105115, Jul. 2019, doi:
1109/ACCESS.2019.2932119.
Huang, J., Luo, Y., Quan, Q., Wang, B., Xue, X. and Zhang, Y. “An autonomous
task assignment and decision-making method for coverage path
planning of multiple pesticide spraying UAVs,” Comput. Electron. Agric.,
vol. 212 pp. 108128, Sep. 2023, doi: 10.1016/j.compag.2023.108128.
Emran, B. and Najjaran, H. “A review of quadrotor: An underactuated
mechanical system,” Annu. Rev. Control. vol. 46, pp. 165-180, 2018, doi:
1016/j.arcontrol.2018.10.009.
Yang, S., Han, J., Xia, L. and Chen, Y. “Adaptive robust servo constraint
tracking control for an underactuated quadrotor UAV with mismatched
uncertainties,” ISA Trans., vol. 106, pp. 12-30, Nov, 2020, doi:
1016/j.isatra.2020.07.007.
Amin, R., Aijun, L. and Shamshirband, S. “A review of quadrotor UAV:
control methodologies and performance evaluation,” Int. J. Autom. Control,
vol. 10, pp. 87-103, May. 2016, doi: 10.1504/IJAAC.2016.076453.
Zhao, Z. and Jin, X. “Adaptive neural network-based sliding
mode tracking control for agricultural quadrotor with variable payload,”
Comput. Electr. Eng., vol. 103, pp. 108336, Oct. 2022, doi:
1016/j.compeleceng.2022.108336.
Camci, E., Kripalani, D., Ma, L., Kayacan, E. and Khanesar, M. “An
aerial robot for rice farm quality inspection with type-2 fuzzy neural
networks tuned by particle swarm optimization-sliding mode control
hybrid algorithm,” Swarm Evol. Comput., vol. 41, pp. 1-8, Aug. 2018,
doi: 10.1016/j.swevo.2017.10.003.
Weng, F., Wei, H., Huang, Y. and Hou, L. “Trajectory tracking control
for uncertain agricultural quadrotor based on combining ASMC and
NFTSMC,” Int. J. Autom. Control, vol. 17, pp. 635-656, Aug. 2023, doi:
1504/IJAAC.2023.134559.
Abdelkader, M., G¨uler, S., Jaleel, H. and Shamma, J. “Aerial swarms:
Recent applications and challenges,” Curr. Robot. Rep., vol. 2, pp. 309-
, Jul. 2021, doi: 10.1007/s43154-021-00063-4.
L. F. C. Ccari, P. R. Yanyachi, “A novel neural network-based robust
adaptive formation control for cooperative transport of a payload using
two underactuated quadrotors,” IEEE Access, vol. 11, pp. 36015-36028,
Apr. 2023, doi: 10.1109/ACCESS.2023.3265957.
Su, Y., Bhowmick, P. and Lanzon, A. “A robust adaptive formation
control methodology for networked multi-UAV systems with applications
to cooperative payload transportation,” Control Eng. Pract., vol. 138, pp.
, Sep. 2023, doi: 10.1016/j.conengprac.2023.105608.
Miao, Q., Zhang, K. and Jiang, B. “Fixed-Time Collision-Free Fault-
Tolerant Formation Control of Multi-UAVs Under Actuator Faults,”
IEEE Trans. Cybern, vol. 54, pp. 3679-3691, Jun. 2024, doi:
1109/TCYB.2024.3352251.
Elmokadem, T. “Distributed coverage control of quadrotor multi-UAV
systems for precision agriculture,” IFAC-PapersOnLine, vol. 52, pp. 251-
, 2019, doi: 10.1016/j.ifacol.2019.12.530.
Hegde, A. and Ghose, D. “Multi-UAV distributed control for load
transportation in precision agriculture,” AIAA Scitech 2020 Forum, pp.
, Jan 2020, doi: 10.2514/6.2020-2068.
Ju, C. and Son, H. “Multiple UAV systems for agricultural applications:
Control, implementation, and evaluation,” Electronics, vol. 7, pp. 162,
Aug. 2018, doi: 10.3390/electronics7090162.
L. F. C. Ccari, W. Aguilar, E. Supo, E. S. Espinoza, Y. S. Vidal,
N. Medina, and L. Pari, “Robust finite-time adaptive nonlinear control
system for an EOD robotic manipulator: Design, implementation, and
experimental validation,” IEEE Access, vol. 12, pp. 93859-93875, Jul.
, doi: 10.1109/ACCESS.2024.3424463.
L. F. C. Ccari, P. R. Yanyachi, J. C. Cutipa Luque, and D.
Yanyachi, “Distributed robust adaptive control for finite-time flight
formation of multi-quadrotor systems with large lumped uncertainties,”
IEEE Access, vol. 12, pp. 113384-113405, Aug. 2024, doi:
1109/ACCESS.2024.3439414.
Wu, J., Peng, H., Chen, Q. and Peng, X. “Modeling and control approach
to a distinctive quadrotor helicopter,” ISA Trans., vol. 53, pp. 173-185,
Jan. 2014, doi: 10.1016/j.isatra.2013.08.010.
Huang, Y., Liu, W., Li, B., Yang, Y. and Xiao, B. “Finite-time
formation tracking control with collision avoidance for quadrotor
UAVs,” J. Frankl. Inst., vol. 357, pp. 4034-4058, May. 2020 doi:
1016/j.jfranklin.2020.01.014.
Tripathi, V., Kamath, A., Behera, L., Verma, N. and Nahavandi, S. “An
Adaptive Fast Terminal Sliding-Mode Controller With Power Rate Proportional
Reaching Law for Quadrotor Position and Altitude Tracking,”
IEEE Trans. Syst., Man, Cybern.: Syst., vol 52, pp. 3612-3625, Apr. 2021,
doi: 10.1109/TSMC.2021.3072099.
Yanyachi, P. and Espinoza-Garc´ıa, B. “UAV’s Applications for row
and field crop Phenotyping and Mapping in Majes-Arequipa,” 2021
IEEE Int. Conf. Aerosp. Signal Process. (INCAS), pp. 1-4, 2021, doi:
1109/INCAS53599.2021.9666918.