Robust Control Using a H∞ Mixed Sensitivity Approach for an UAV with a Suspended Payload
Keywords:
robust control, UAV, Unmanned aerial vehicle, multibody dynamics, H infinityAbstract
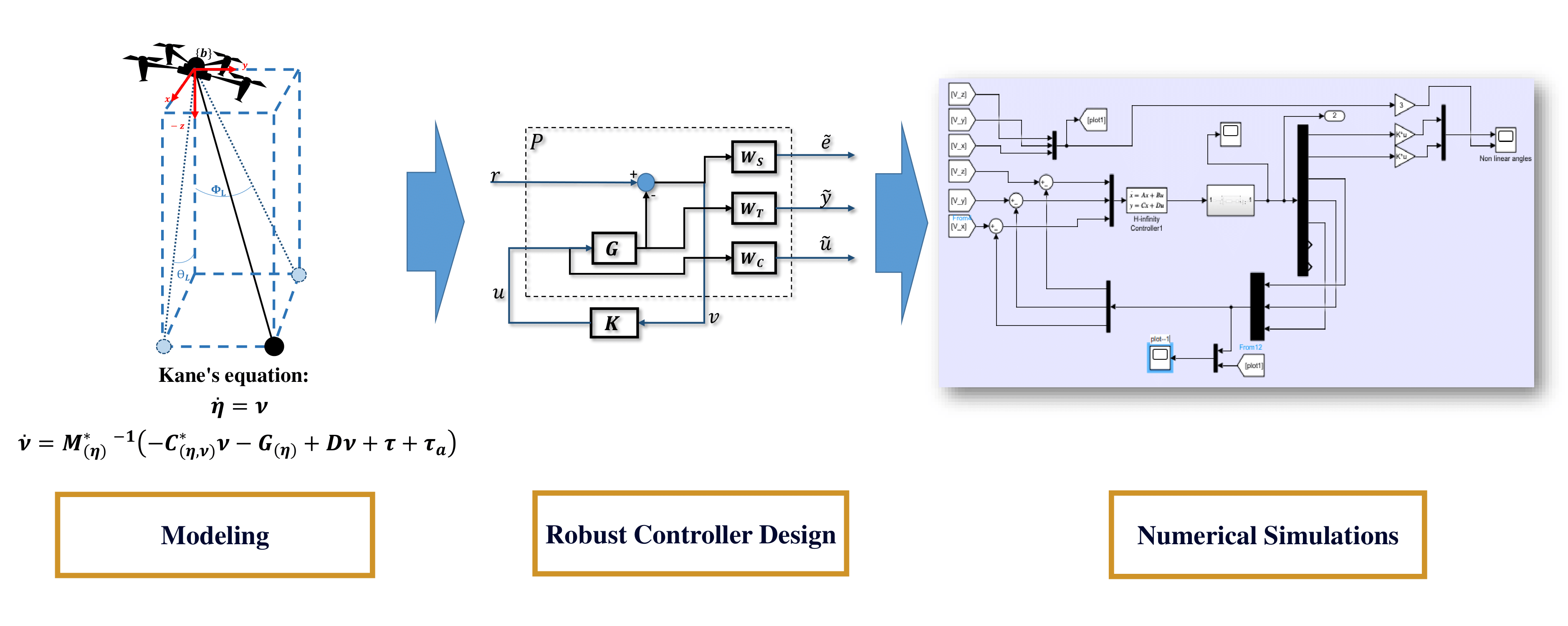
Unmanned aerial vehicles (UAVs) are increasingly being utilized in a wide range of applications, including military operations, agronomy, and delivery services, among others. These applications often require load transportation missions which are executed by the UAV, that can be executed by the UAV, a link, and its payload. The UAV with its suspended load is a kind of highly coupled system where good performance and stability are required despite disturbances and model uncertainties. In this work, we present an H∞ robust control design for this system. The desired controller is synthesized to achieve suboptimal robustness in terms of performance and stability. Simulation results demonstrate robustness against disturbances and model uncertainties. In terms of performance, this control system shows up to a 50% reduction in load oscillations compared to alternative controllers, such as the Linear Quadratic Regulator (LQR).
Downloads
References
V. San Juan, M. Santos, J. Andújar. "Intelligent UAV Map Generation and Discrete Path Planning for Search and Rescue Operations," in Complexity, vol. 2018, no. 1, 2018.
Madridano, Á., et al. "Vehículo aéreo no tripulado para vigilancia y monitorización de incendios.," in Revista Iberoamericana de Automática e Informática industrial, vol. 17, no. 3, pp. 254, 2020.
Moore, A., et al. "Inspection of electrical transmission structures with UAV path conformance and lidar-based geofences," in , vol. 52 1, pp. 1–5, 2018.
J. Sierra-García, M. Santos. "Intelligent control of an UAV with a cable-suspended load using a neural network estimator," in Expert Systems with Applications, vol. 183, pp. 115380, 2021.
Shi, Q., et al. "Wind-induced response of rice under the action of the downwash flow field of a multi-rotor UAV," in Biosystems Engineering, vol. 203, pp. 60–69, 2021.
J. Potter, C. Adams, W. Singhose. "A Planar Experimental Remote-Controlled Helicopter With a Suspended Load," in IEEE/ASME Transactions on Mechatronics, vol. 20, no. 5, pp. 2496–2503, 2015.
K. Klausen, T. Fossen, T. Johansen. "Nonlinear Control with Swing Damping of a Multirotor UAV with Suspended Load," in Journal of Intelligent amp; Robotic Systems, vol. 88, no. 2–4, pp. 379–394, 2017.
Bernard, M., et al. "Autonomous transportation and deployment with aerial robots for search and rescue missions," in Journal of Field Robotics, vol. 28, no. 6, pp. 914–931, 2011.
K. Klausen, T. Fossen, T. Johansen. "Nonlinear control of a multirotor UAV with suspended load," in , 2015.
Us, K., et al. "On the Effect of Slung Load on Quadrotor Performance," in Procedia Computer Science, vol. 158, pp. 346–354, 2019.
W. Eikyu, K. Sekiguchi, K. Nonaka. "Nonlinear control for the extended model of the load-suspended UAV based on the experiments," in IFAC-PapersOnLine, vol. 54, no. 14, pp. 90–95, 2021.
Barrón-Gómez, R., et al. "Wavelet neural network PID controller for a UAS transporting a cable-suspended load," in IFAC-PapersOnLine, vol. 50, no. 1, pp. 2335–2340, 2017.
A. Erasmus, H. Jordaan. "Robust Adaptive Control of a Multirotor with an Unknown Suspended Payload," in IFAC-PapersOnLine, vol. 53, no. 2, pp. 9432–9439, 2020.
Wang, H., et al. "Robust $H_inf$ attitude tracking control of a quadrotor UAV on SO(3) via variation-based linearization and interval matrix approach," in ISA Transactions, vol. 87, pp. 10–16, 2019.
R. Mahony, V. Kumar, P. Corke. "Multirotor Aerial Vehicles: Modeling, Estimation, and Control of Quadrotor," in IEEE Robotics amp; Automation Magazine, vol. 19, no. 3, pp. 20–32, 2012.
M. Bernard, K. Kondak. "Generic slung load transportation system using small size helicopters," in , 2009.
K. Zhou, J. Doyle, Essentials of robust control. , 1998.
Cutipa-Luque, J., et al. "Robust control of an underactuated AUV," in IFAC Proceedings Volumes, vol. 45, no. 27, pp. 138–143, 2012.
Doyle, J., et al. "State-space solutions to standard H/sub 2/ and H/sub infinity / control problems," in IEEE Transactions on Automatic Control, vol. 34, no. 8, pp. 831–847, 1989.
S. Skogestad, I. Postlethwaite, Multivariable feedback control. Wiley, 2010.
G. Raffo, M. Almeida. "A Load Transportation Nonlinear Control Strategy Using a Tilt-Rotor UAV," in Journal of Advanced Transportation, vol. 2018, pp. 1–20, 2018.
M. Guo, Y. Su, D. Gu. "Mixed H 2 / H infinite Tracking Control with Constraints for Single Quadcopter Carrying a Cable-suspended Payload," in IFAC-PapersOnLine, vol. 50, no. 1, pp. 4869–4874, 2017.
Omar, H., et al. "Recent advances and challenges in controlling quadrotors with suspended loads," in Alexandria Engineering Journal, vol. 63, pp. 253–270, 2023.
Li, B., et al. "Adaptive Neural Network-Based Fault-Tolerant Control for Quadrotor-Slung-Load System Under Marine Scene," in IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 681–691, 2024.
C. Peris, M. Norton, S. Khoo. "Adaptive Multi Surface Sliding Mode Control of a Quadrotor Slung Load System," in 2024 10th International Conference on Automation, Robotics and Applications (ICARA), 2024.
Alves Fagundes-Junior, L., et al. "Communication Delay in UAV Missions: A Controller Gain Analysis to Improve Flight Stability," in IEEE Latin America Transactions, vol. 21, no. 1, pp. 7–15, 2023.
Yang, S., et al. "Finite-Time Convergence Control for a Quadrotor Unmanned Aerial Vehicle With a Slung Load," in IEEE Transactions on Industrial Informatics, vol. 20, no. 1, pp. 605–614, 2024.
Lan, X., et al. "Anti-Swing Strategy of a Quadrotor with Suspended Payload Based on Model Predictive Control," in 2023 9th International Conference on Control Science and Systems Engineering (ICCSSE), 2023.
F. Panetsos, G. Karras, K. Kyriakopoulos. "An NMPC Framework for Tracking and Releasing a Cable-suspended Load to a Ground Target Using a Multirotor UAV," in 2024 IEEE International Conference on Robotics and Automation (ICRA), vol. 50, pp. 10057–10063, 2024.
Nogueira, E., et al. "A Systematic Review of the Literature on Machine Learning Methods Applied to High Throughput Phenotyping in Agricultural Production," in IEEE Latin America Transactions, vol. 21, no. 7, pp. 783–796, 2023.
Enriquez, J., et al. "Robust Control of an Rotary-wing UAV with Suspended Load," in Journal is required!, 2023.
Hernández-González, O., et al. "Robust cascade observer for a disturbance unmanned aerial vehicle carrying a load under multiple time-varying delays and uncertainties," in International Journal of Systems Science, vol. 55, no. 5, pp. 1056–1072, 2024.
Guerrero-Sánchez, M., et al. "Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload," in Mathematics, vol. 7, no. 11, pp. 1090, 2019.
Guerrero-Sánchez, M., et al. "Robust IDA-PBC for under-actuated systems with inertia matrix dependent of the unactuated coordinates: application to a UAV carrying a load," in Nonlinear Dynamics, vol. 105, no. 4, pp. 3225–3238, 2021.
M. Huayna-Aguilar, J. C., P. Raul. "Robust Control and Fuzzy Logic Guidance for an Unmanned Surface Vehicle," in International Journal of Advanced Computer Science and Applications, vol. 11, no. 8, 2020.
Urbina-Brito, N., et al. "A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle," in Mathematics, vol. 9, no. 15, pp. 1822, 2021.