Three-Dimensional Reconstruction of Enclosed Environments Based on Two-Dimensional LiDAR: Starting Point and Future Challenges
Keywords:
Tridimentional reconstruction, LiDAR, robot operating system, mapping, mobile robotsAbstract
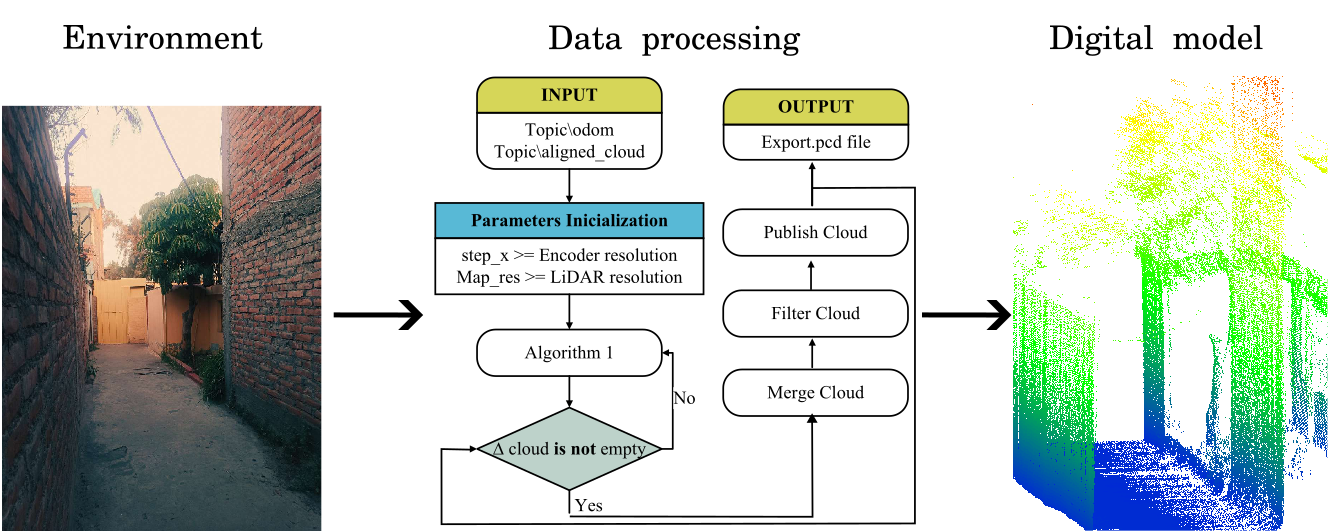
Robotics and LiDAR technology stand as a crucial cornerstone for the development of cutting-edge three-dimensional mapping systems. This study represents a significant advancement by addressing the development of an initial approach for a three-dimensional mapping system, utilizing a unique LiDAR translational mechanism. In pursuit of this objective, a comprehensive review of works exclusively dedicated to mechanisms employing two-dimensional LiDAR has been conducted. This selective approach results in a comprehensive understanding of the mechanism used for three-dimensional reconstruction and lays the groundwork for future endeavors. Furthermore, a robotic prototype has been implemented using the Robot Operating System (ROS), serving as an accessible tool for implementing our initial approach and engaging new researchers from our university in the application of robotics for three-dimensional reconstruction through LiDAR technology. The validation of our study is conducted through tests in both open and closed environments, revealing high data resolution and a correlation of over 98% with the real environment. The study suggests further research based on the identified errors and introduces new challenges for developing robust prototypes capable of handling changes in a robot's attitude.
Downloads
References
F. Inostroza, I. Parra-Tsunekawa, and J. Ruiz-del Solar, “Robust local-
ization for underground mining vehicles: An application in a room and
pillar mine,” Sensors, vol. 23, no. 19, 2023.
L. Yan, J. Dai, Y. Zhao, and C. Chen, “Real-time 3d mapping in complex
environments using a spinning actuated lidar system,” Remote Sensing,
vol. 15, no. 4, 2023.
S. W. Zheng Fang, Shibo Zhao and Y. Zhang, “A real-time 3d perception
and reconstruction system based on a 2d laser scanner,” Journal of
Sensors, vol. 2018, p. 14, 2018.
M. Chen, S. Yang, X. Yi, and D. Wu, “Real-time 3d mapping using a 2d
laser scanner and imu-aided visual slam,” in 2017 IEEE International
Conference on Real-time Computing and Robotics (RCAR), pp. 297–302,
S. Zheng, J. Wang, C. Rizos, W. Ding, and A. El-Mowafy, “Simultaneous
localization and mapping (slam) for autonomous driving: Concept and
analysis,” Remote Sensing, vol. 15, no. 4, 2023.
X. Zhou, G. Zhao, R. Zhao, Y. Cheng, and Y. Wang, “Mechanism design
of a small mobile robot for inspection of underground cables-in-pipe,”
Journal of Physics: Conference Series, vol. 1639, p. 012033, oct 2020.
J. Martz, W. Al-Sabban, and R. N. Smith, “Survey of unmanned sub-
terranean exploration, navigation, and localisation,” IET Cyber-systems
and Robotics, vol. 2, no. 1, p. 1 – 13, 2020.
B. Zhou, M. Du, Z. Chen, Y. Liu, Y. Zhang, and Y. Wang, “Design and
implementation of intelligent security robot based on lidar and vision
fusion*,” Journal of Physics: Conference Series, vol. 2216, p. 012013,
mar 2022.
Y.-k. Wang, J. Huo, and X.-s. Wang, “A real-time robotic indoor 3d
mapping system using duel 2d laser range finders,” in Proceedings of
the 33rd Chinese Control Conference, pp. 8542–8546, 2014.
P. Prempraneerach and T. Usupan, “Stablizied and rotating mechanism of
d laser scanner for 3d point cloud reconstruction,” in 2018 International
Electrical Engineering Congress (iEECON), pp. 1–4, 2018.
X. Xu, L. Zhang, J. Yang, C. Cao, W. Wang, Y. Ran, Z. Tan, and
M. Luo, “A review of multi-sensor fusion slam systems based on 3d
lidar,” Remote Sensing, vol. 14, no. 12, 2022.
L. Yang, H. Ma, Z. Nie, H. Zhang, Z. Wang, and C. Wang, “3d lidar point
cloud registration based on imu preintegration in coal mine roadways,”
Sensors, vol. 23, no. 7, 2023.
Y. Chen, J. Tang, C. Jiang, L. Zhu, M. Lehtomäki, H. Kaartinen,
R. Kaijaluoto, Y. Wang, J. Hyyppä, H. Hyyppä, H. Zhou, L. Pei, and
R. Chen, “The accuracy comparison of three simultaneous localiza-
tion and mapping (slam)-based indoor mapping technologies,” Sensors,
vol. 18, no. 10, 2018.
J. Mendoza-Chok, J. C. C. Luque, N. F. Salas-Cueva, D. Yanyachi, and
P. R. Yanyachi, “Hybrid control architecture of an unmanned surface
vehicle used for water quality monitoring,” IEEE Access, vol. 10,
pp. 112789–112798, 2022.
A. Mamani-Saico and P. R. Yanyachi, “Implementation and performance
study of the micro-ros/ros2 framework to algorithm design for attitude
determination and control system,” IEEE Access, vol. 11, pp. 128451–
, 2023.
M. Garrido, D. S. Paraforos, D. Reiser, M. Vázquez Arellano, H. W.
Griepentrog, and C. Valero, “3d maize plant reconstruction based on
georeferenced overlapping lidar point clouds,” Remote Sensing, vol. 7,
no. 12, pp. 17077–17096, 2015.
M. G. Ocando, N. Certad, S. Alvarado, and A. Terrones, “Autonomous
d slam and 3d mapping of an environment using a single 2d lidar and
ros,” in 2017 Latin American Robotics Symposium (LARS) and 2017
Brazilian Symposium on Robotics (SBR), pp. 1–6, 2017.
D.-G. Choi, Y. Bok, J.-S. Kim, I. Shim, and I. S. Kweon, “Structure-
from-motion in 3d space using 2d lidars,” Sensors, vol. 17, no. 2, 2017.
H. F. Murcia, M. F. Monroy, and L. F. Mora, “3d scene reconstruction
based on a 2d moving lidar,” in Applied Informatics, (Cham), pp. 295–
, Springer International Publishing, 2018.
X. Kang, S. Yin, and Y. Fen, “3d reconstruction & assessment frame-
work based on affordable 2d lidar,” in 2018 IEEE/ASME International
Conference on Advanced Intelligent Mechatronics (AIM), pp. 292–297,
H. Zhu, H. Wang, and S. Sun, “Research on dem reconstruction based
on airborne 2d laser radar,” in 2018 37th Chinese Control Conference
(CCC), pp. 8435–8440, 2018.
P. Prempraneerach and T. Usupan, “Stablizied and rotating mechanism of
d laser scanner for 3d point cloud reconstruction,” in 2018 International
Electrical Engineering Congress (iEECON), pp. 1–4, 2018.
Z. Fang, S. Zhao, S. Wen, and Y. Zhang, “A real-time 3d perception and
reconstruction system based on a 2d laser scanner,” Journal of Sensors,
vol. 2018, p. 14, 2018. Article ID 2937694.
W. Zhen and S. Scherer, “A unified 3d mapping framework using a 3d
or 2d lidar,” arXiv e-prints, p. arXiv:1810.12515, Oct. 2018.
J. Baek, “Two-dimensional lidar sensor-based three-dimensional point
cloud modeling method for identification of anomalies inside tube
structures for future hypersonic transportation,” Sensors, vol. 20, no. 24,
H. F. Murcia, D. A. Sanabria, Dehyro-Méndez, and M. G. Forero,
“Development of a simulation tool for 3d plant modeling based on
d lidar sensor,” in 2020 Virtual Symposium in Plant Omics Sciences
(OMICAS), pp. 1–6, 2020.
S. Oh and S.-Y. Park, “High-density 3d reconstruction in a large space
using single camera and 2d lidar,” in 2021 International Conference
on Computational Science and Computational Intelligence (CSCI),
pp. 1748–1749, 2021.
K. K. Saha, C. Weltzien, and M. Zude-Sasse, “Non-destructive leaf
area estimation of tomato using mobile lidar laser scanner,” in 2021
IEEE International Workshop on Metrology for Agriculture and Forestry
(MetroAgriFor), pp. 187–191, 2021.
C. Hu, C. Yang, K. Li, and J. Zhang, “A forest point cloud real-time
reconstruction method with single-line lidar based on visual-imu fusion,”
Applied Sciences, vol. 12, no. 9, 2022.
E. A. A. Memon, S. R. U. N. Jafri, and S. M. U. Ali, “A rover team
based 3d map building using low cost 2d laser scanners,” IEEE Access,
vol. 10, pp. 1790–1801, 2022.
G. Ligorio and A. M. Sabatini, “Extended kalman filter-based methods
for pose estimation using visual, inertial and magnetic sensors: Com-
parative analysis and performance evaluation,” Sensors, vol. 13, no. 2,
pp. 1919–1941, 2013.
M. Li, K. Hu, Y. Liu, E. Hu, C. Tang, H. Zhu, and G. Zhou, “A
multimodal robust simultaneous localization and mapping approach
driven by geodesic coordinates for coal mine mobile robots,” Remote
Sensing, vol. 15, no. 21, 2023