Mobility Deficit Identification and Compensation through an Artificial Neural Network and Adaptive Controller Design during Gait
Keywords:
Adaptive controller, Artificial neural network, Knee orthosis, Mobility deficit compensationAbstract
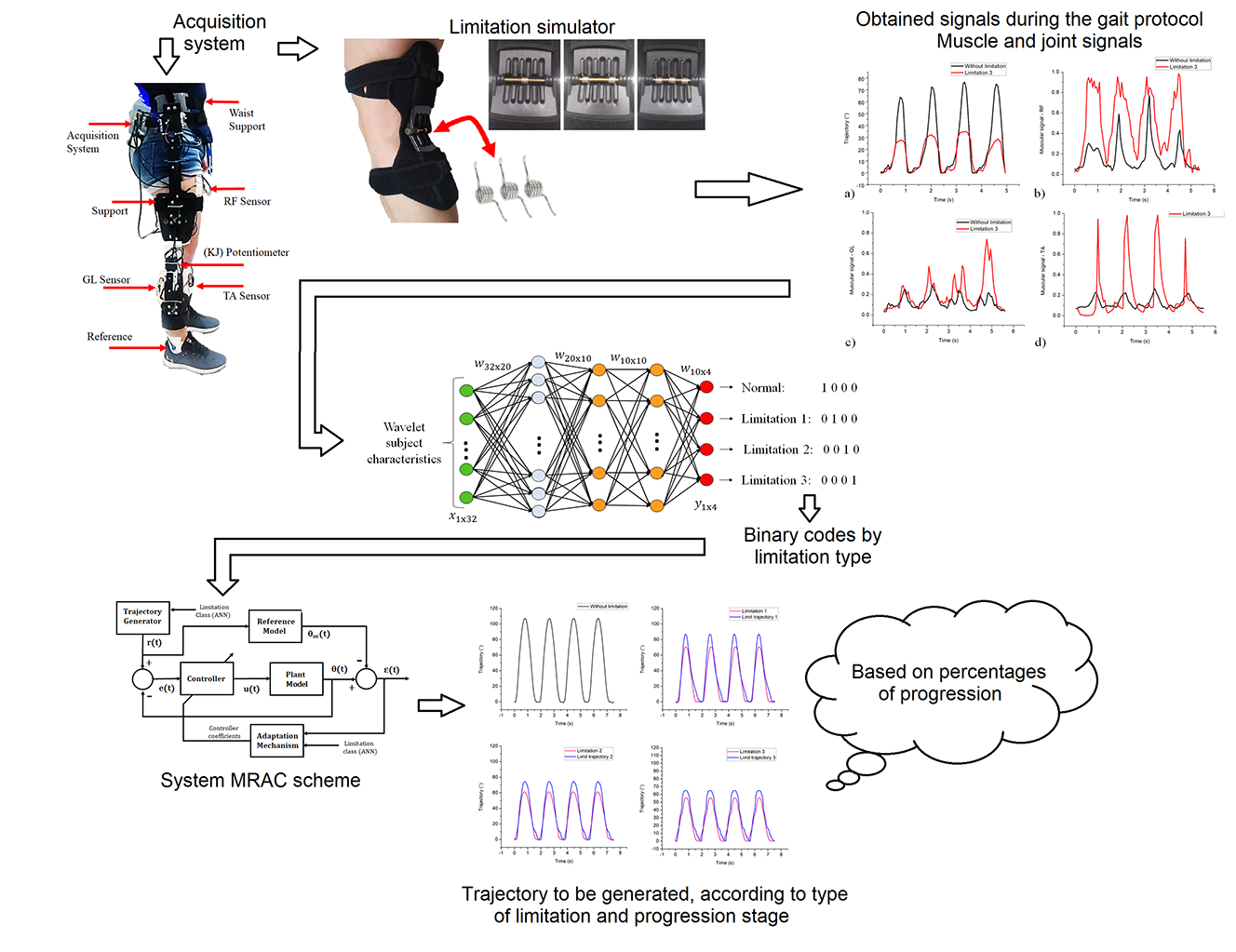
This article presents a progressive compensation strategy for gait recovery in patients with different degrees of limited knee mobility, based on angular analysis and muscle electrical activity, and artificial intelligence. Ten subjects were tested during gait on a flat surface simulating 4 conditions of limited knee mobility with an active knee brace. Data on the amplitude of the electrical signal from 3 leg muscles were analyzed: rectus femoris, tibialis anterior, and gastrocnemius. In addition to the electromyography sensors, an angular position sensor was placed on the knee joint. An artificial neural network was trained to identify the type of limitation of each patient in their muscle activity. A knee orthosis with a linear actuator was designed to compensate for the loss of force during knee flexion-extension movement, according with limiting condition. The actuator trajectory is controlled through a model reference adaptive controller with a fuzzy logic-based adaptation mechanism. The simulation demonstrates the efficiency of this strategy, despite the high-amplitude disturbances in the system.
Downloads
References
Y. H. Bae, W. H. Chang, and S. S. M. Fong, “Different effects of robot-assisted gait and independent over-ground gait on foot plantar pressure in incomplete spinal cord injury: A preliminary study,” Int. J. Environ. Res. Public Health, vol. 18, no. 22, pp. 6–13, 2021, doi: 10.3390/ijerph182212072.
H. Zhang et al., “Three-Dimensional Gait Analysis and sEMG Measures for Robotic-Assisted Gait Training in Subacute Stroke: A Randomized Controlled Trial,” Biomed Res. Int., vol. 2023, 2023, doi: 10.1155/2023/7563802.
A. M. Abdullahi and R. Chaichaowarat, “Sensorless Estimation of Human Joint Torque for Robust Tracking Control of Lower-Limb Exoskeleton Assistive Gait Rehabilitation,” J. Sens. Actuator Networks, vol. 12, no. 4, 2023, doi: 10.3390/jsan12040053.
W. Wang, T. Gong, Z. Song, Z. Wang, and J. Ji, “Simulation study on assist-as-needed control of a rehabilitation robotic walker,” Technol. Health Care, vol. 31, no. S1, pp. 293–302, 2023, doi: 10.3233/THC-236025.
J. Narayan and S. K. Dwivedy, “Towards Neuro-Fuzzy Compensated PID Control of Lower Extremity Exoskeleton System for Passive Gait Rehabilitation,” IETE J. Res., vol. 69, no. 2, pp. 778–795, 2023, doi: https://doi.org/10.1080/03772063.2020.1838346.
J. Cao, S. Q. Xie, R. Das, and G. L. Zhu, “Control strategies for effective robot assisted gait rehabilitation: The state of art and future prospects,” Medical Engineering and Physics, vol. 36, no. 12. Elsevier Ltd, pp. 1555–1566, Dec. 01, 2014, doi: 10.1016/j.medengphy.2014.08.005.
M. S. H. Bhuiyan, I. A. Choudhury, and M. Dahari, “Development of a control system for artificially rehabilitated limbs: a review,” Biol. Cybern., vol. 109, no. 2, pp. 141–162, 2015, doi: 10.1007/s00422-014-0635-1.
S. Hussain, P. K. Jamwal, and M. H. Ghayesh, “Single joint robotic orthoses for gait rehabilitation: an educational technical review,” J Rehabil Med, no. 36, pp. 333–338, 2016, doi: 10.2340/16501977-2073.
W. Meng, Q. Liu, Z. Zhou, Q. Ai, B. Sheng, and S. (Shane) Xie, “Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation,” Mechatronics, vol. 31, pp. 132–145, 2015, doi: 10.1016/j.mechatronics.2015.04.005.
J. Cao, S. Quan, R. Das, and G. L. Zhu, “Control strategies for effective robot assisted gait rehabilitation : The state of art and future prospects,” Med. Eng. Phys., vol. 36, no. 12, pp. 1555–1566, 2014, doi: 10.1016/j.medengphy.2014.08.005.
L. Marchal-crespo and R. Riener, “Technology of the Robotic Gait Orthosis Lokomat,” Neurorehabilitation Technol., pp. 665–681, 2022, doi: https://doi.org/10.1007/978.
D. Su, Z. Hu, J. Wu, P. Shang, and Z. Luo, “Review of adaptive control for stroke lower limb exoskeleton rehabilitation robot based on motion intention recognition,” Front. Neurorobot., vol. 17, 2023, doi: 10.3389/fnbot.2023.1186175.
F. Artoni, A. Cometa, S. Dalise, V. Azzollini, S. Micera, and C. Chisari, “Cortico-muscular conncectivity is modelated by passive and active Lokomat-assisted Gait,” 2023. doi: https://doi.org/10.1038/s41598-023-48072.
S. Jezernik, G. Colombo, T. Keller, H. Frueh, and M. Morari, “Robotic Orthosis Lokomat : A Rehabilitation and Research Tool,” Int. Neuromodulation Soc., vol. 6 no. 2, no. 3, pp. 108–115, 2003, doi: 1094-7159/03.
J. L. Emken, S. J. Harkema, J. A. Beres-Jones, C. K. Ferreira, and D. J. Reinkensmeyer, “Feasibility of manual teach-and-replay and continuous impedance shaping for robotic locomotor training following spinal cord injury,” IEEE Trans. Biomed. Eng., vol. 55, no. 1, pp. 322–334, 2008, doi: 10.1109/TBME.2007.910683.
S. K. Banala, A. Kulpe, and S. K. Agrawal, “A powered leg orthosis for gait rehabilitation of motor-impaired patients,” Proc. - IEEE Int. Conf. Robot. Autom., no. April, pp. 4140–4145, 2007, doi: 10.1109/ROBOT.2007.364115.
G. Kwakkel, B. J. Kollen, and R. C. Wagenaar, “Therapy Impact on Functional Recovery in Stroke Rehabilitation: A critical review of the literature,” Physiotherapy, vol. 85, no. 7, pp. 377–391, 1999, doi: 10.1016/S0031-9406(05)67198-2.
E. Akdogan and M. A. Adli, “The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot,” Mechatronics, vol. 21, no. 3, pp. 509–522, 2011, doi: 10.1016/j.mechatronics.2011.01.005.
S. L. Chaparro-Cárdenas, A. A. Lozano-Guzmán, J. A. Ramirez-Bautista, and A. Hernández-Zavala, “A review in gait rehabilitation devices and applied control techniques,” Disabil. Rehabil. Assist. Technol., vol. 13, pp. 819–834, 2018, doi: 10.1080/17483107.2018.1447611.
M. B. I. Raez, M. S. Hussain, F. Mohd-Yasin, M. Reaz, M. S. Hussain, and F. Mohd-Yasin, “Techniques of EMG signal analysis: detection, processing, classification and applications.,” Biol. Proced. Online, vol. 8, no. 1, pp. 11–35, 2006, doi: 10.1251/bpo115.
H. J. Hermens et al., European Recommendations for Surface ElectroMyoGraphy, vol. 8. Roessingh Research and Development b.v., 1999.
M. S. Hussain, M. B. I. Reaz, and M. I. Ibrahimy, “Electromyography signal analysis using wavelet transform nd higher order statistics to determnine muscle contraction,” Expert Syst., vol. 26, no. 1, pp. 35–48, 2009, doi: 10.1111/j.1468-0394.2008.00483.x.
P. Konrad, The ABC of EMG A Practical Introduction to Kinesiological Electromyography. Scottsdale, Arizona, 2006.
NASUS SPORTS, “Powerknee brace,” 2021. https://nasus-sports.com/products/powerknee-brace.
Helsinki, “Declaration of Helsinki World Medical Association Declaration of Helsinki,” World Heal. Organ., vol. 79, no. October 1975, pp. 373–374, 2001.
P. Fuangkhon, “An incremental learning preprocessor for feed-forward neural network,” Artif. Intell. Rev., vol. 41, no. 2, pp. 183–210, 2014, doi: 10.1007/s10462-011-9304-0.
Stefan Fritsch, Frauke Guenther, Marvin N. Wright, Marc Suling, and Sebastian M. Mueller, “Package ‘neuralnet’ Training of Neural Networks,” pp. 1–15, 2019, [Online]. Available: https://cran.r-project.org/web/packages/neuralnet/neuralnet.pdf.
A. Max et al., “Package ‘ caret ’ R topics documented :,” 2020.
A. Tobias, O. Sander, and N. Beerenwinkel, “Package ‘ ROCR ,’” 2020.
P. Jain and N. M.J, “Design of a Model Reference Adaptive Controller Using Modified MIT Rule for a Second Order System,” Adv. Electron. Electr. Eng., vol. 3, no. 4, pp. 477–484, 2013, doi: 2231-1297.
A. Shekhar and A. Sharma, “Review of Model Reference Adaptive Control,” in 2018 International Conference on Information , Communication, Engineering and Technology (ICICET), Aug. 2018, pp. 1–5, doi: 10.1109/ICICET.2018.8533713.