Modelling pedestrian behaviour using swarm techniques
Keywords:
Swarm algorithms, Crowd simulation, Pathfinding, Pedestrian modeling, NPCs, Obstacle avoidance, Crowd dynamics, Flocking, Environment modeling, Autonomous agents, Path planning.Abstract
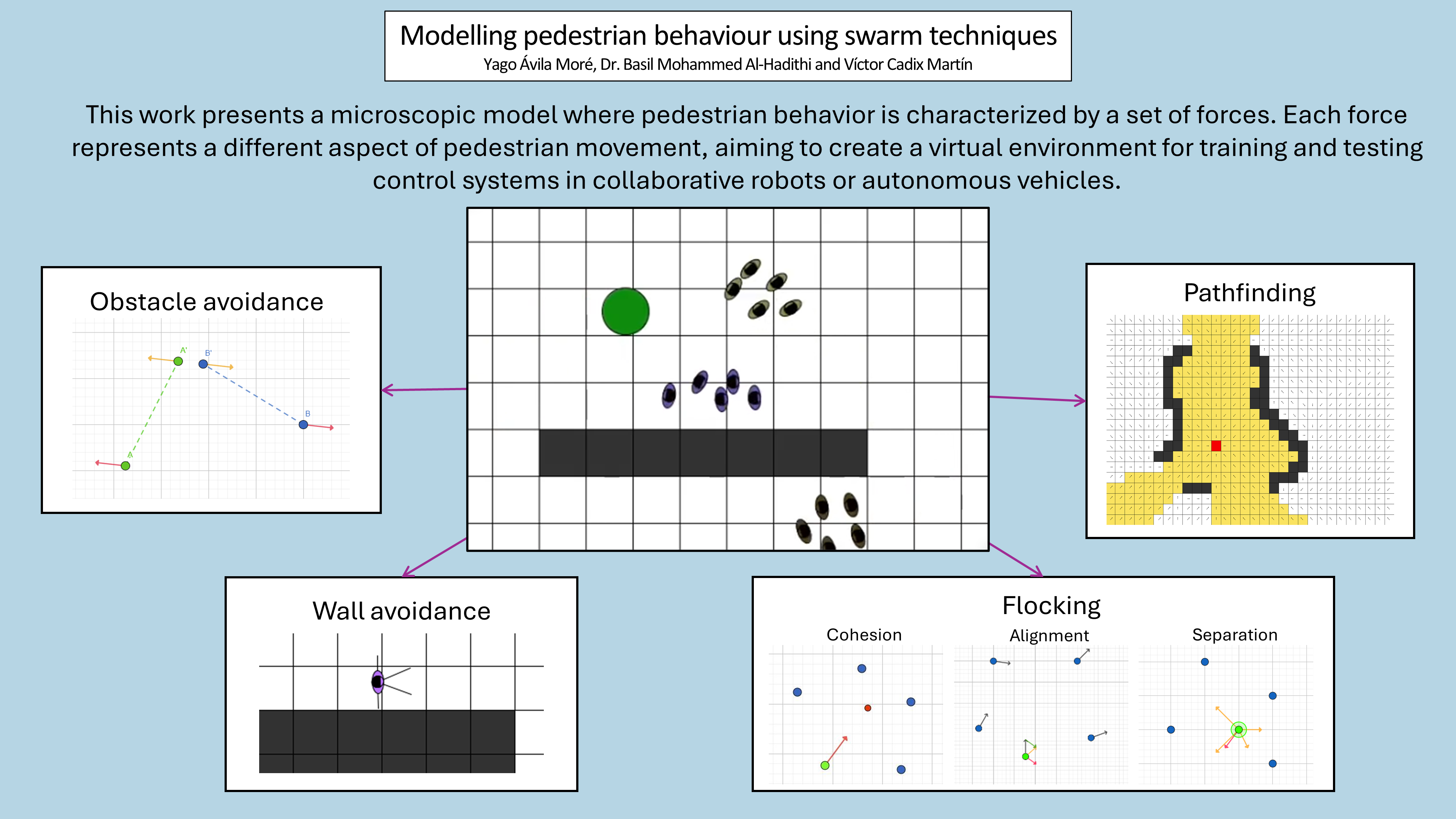
Modelling pedestrians and groups of people is a highly multidisciplinary technique, given the significant interest it attracts from various branches of science and engineering. This results in many different methodologies that may arise from diverse objectives. The model developed in this work is an agent-based model, in which pedestrian behaviour is defined by a set of forces. Each force models an aspect of pedestrian gait, with the objective of creating a virtual environment to train and test control systems for collaborative robots or autonomous vehicles. To meet the modelling requirements, the system employs various algorithms, such as "flocking"\, which simulates the coordination and formation of groups, "pathfinding", which enables agents to discover optimal routes within a given space, and algorithms specialized in avoiding walls and dynamic obstacles. These components collaborate to accurately depict how crowds move and react in different environments and situations. Thanks to the modularity of this approach, which facilitates the adjustment and expansion of the components, the developed system can be integrated into various applications, such as simulating non-playable characters (NPCs) in video games or modelling the evacuation of a building.
Downloads
References
J. Toner and Y. Tu, “Flocks, herds, and schools: A quantitative theory
of flocking,” Physical review E, vol. 58, no. 4, p. 4828, 1998. DOI:
1103/PhysRevE.58.4828.
A. Aroor, S. L. Esptein, and R. Korpan, “Mengeros: A crowd simulation
tool for autonomous robot navigation,” in 2017 AAAI Fall Symposium
Series, 2017. DOI:10.48550/arXiv.1801.08823.
T. Camp, J. Boleng, and V. Davies, “A survey of mobility models for ad
hoc network research,” Wireless communications and mobile computing,
vol. 2, no. 5, pp. 483–502, 2002. DOI:10.1002/wcm.72.
R. L. Hughes, “A continuum theory for the flow of pedestrians,”
Transportation Research Part B: Methodological, vol. 36, no. 6, pp. 507–
, 2002. DOI:10.1016/S0191-2615(01)00015-7.
R.-Y. Guo, H.-J. Huang, and S. Wong, “Collection, spillback, and
dissipation in pedestrian evacuation: A network-based method,” Trans-
portation Research Part B: Methodological, vol. 45, no. 3, pp. 490–506,
DOI:10.1016/j.trb.2010.09.009.
R. L. Hughes, “The flow of human crowds,” Annual review
of fluid mechanics, vol. 35, no. 1, pp. 169–182, 2003.
DOI:10.1146/annurev.fluid.35.101101.161136.
D. Helbing and P. Molnar, “Social force model for pedestrian
dynamics,” Physical review E, vol. 51, no. 5, p. 4282, 1995.
DOI:10.1103/PhysRevE.51.4282.
N. Bellomo, A. Bellouquid, and D. Knopoff, “From the microscale to
collective crowd dynamics,” Multiscale Modeling & Simulation, vol. 11,
no. 3, pp. 943–963, 2013. DOI:10.1137/130904569.
C. W. Reynolds, “Flocks, herds and schools: A distributed beha-
vioral model,” in Proceedings of the 14th annual conference on
Computer graphics and interactive techniques, pp. 25–34, 1987.
DOI:10.1145/37402.37406.
C.-T. Li and S.-D. Lin, “Evaplanner: an evacuation planner with social-
based flocking kinetics,” in Proceedings of the 18th ACM SIGKDD
international conference on Knowledge discovery and data mining,
pp. 1568–1571, 2012. DOI:10.1145/2339530.2339782.
M. Dewi, M. Hariadi, and M. H. Purnomo, “Simulating the movement
of the crowd in an environment using flocking,” in 2011 2nd Inter-
national Conference on Instrumentation, Communications, Information
Technology, and Biomedical Engineering, pp. 186–191, IEEE, 2011.
DOI:10.1109/ICICI-BME.2011.6108638.
Y. Feng, J. Dong, J. Wang, and H. Zhu, “Distributed flocking algorithm
for multi-uav system based on behavior method and topological com-
munication,” Journal of Bionic Engineering, vol. 20, no. 2, pp. 782–796,
DOI:10.1007/s42235-022-00287-w.
C. W. Reynolds et al., “Steering behaviors for autonomous characters,”
in Game developers conference, vol. 1999, pp. 763–782, Citeseer, 1999.
DOI:not available.
E. Soria, F. Schiano, and D. Floreano, “The influence of limited
visual sensing on the reynolds flocking algorithm,” in 2019 Third IEEE
International Conference on Robotic Computing (IRC), pp. 138–145,
IEEE, 2019. DOI:10.1109/IRC.2019.00028.
M. Sabbagh, M. H. Tanveer, A. Thomas, J. Faile, and M. Salman,
“Real time voronoi-like path planning using flow field and a,” in 2020
IEEE 17th International Conference on Smart Communities: Improving
Quality of Life Using ICT, IoT and AI (HONET), pp. 103–107, 2020.
DOI:10.1109/HONET50430.2020.932283.
G. Pentheny, “Advanced techniques for robust, efficient crowds,”
in Game AI Pro 360, pp. 137–146, CRC Press, 2019.
DOI:10.1201/9780429055096.
E. Emerson, “Crowd pathfinding and steering using flow field tiles,” in
Game AI Pro 360: Guide to Movement and Pathfinding, pp. 67–76, CRC
Press, 2019. DOI:10.1201/9780429055096.
J. Van den Berg, M. Lin, and D. Manocha, “Reciprocal velocity obsta-
cles for real-time multi-agent navigation,” in 2008 IEEE international
conference on robotics and automation, pp. 1928–1935, Ieee, 2008.
DOI:10.1109/ROBOT.2008.4543489.
S. J. Guy, J. Chhugani, C. Kim, N. Satish, M. Lin, D. Mano-
cha, and P. Dubey, “Clearpath: highly parallel collision avoidance
for multi-agent simulation,” in Proceedings of the 2009 ACM SIG-
GRAPH/Eurographics Symposium on Computer Animation, pp. 177–
, 2009. DOI:10.1145/1599470.1599494.