Trajectory planning technique based on curved-layered and parallel contours for 6-DOF deposition
Keywords:
Additive manufacturing, Curved-layered printing, Flattening, Trajectory planningAbstract
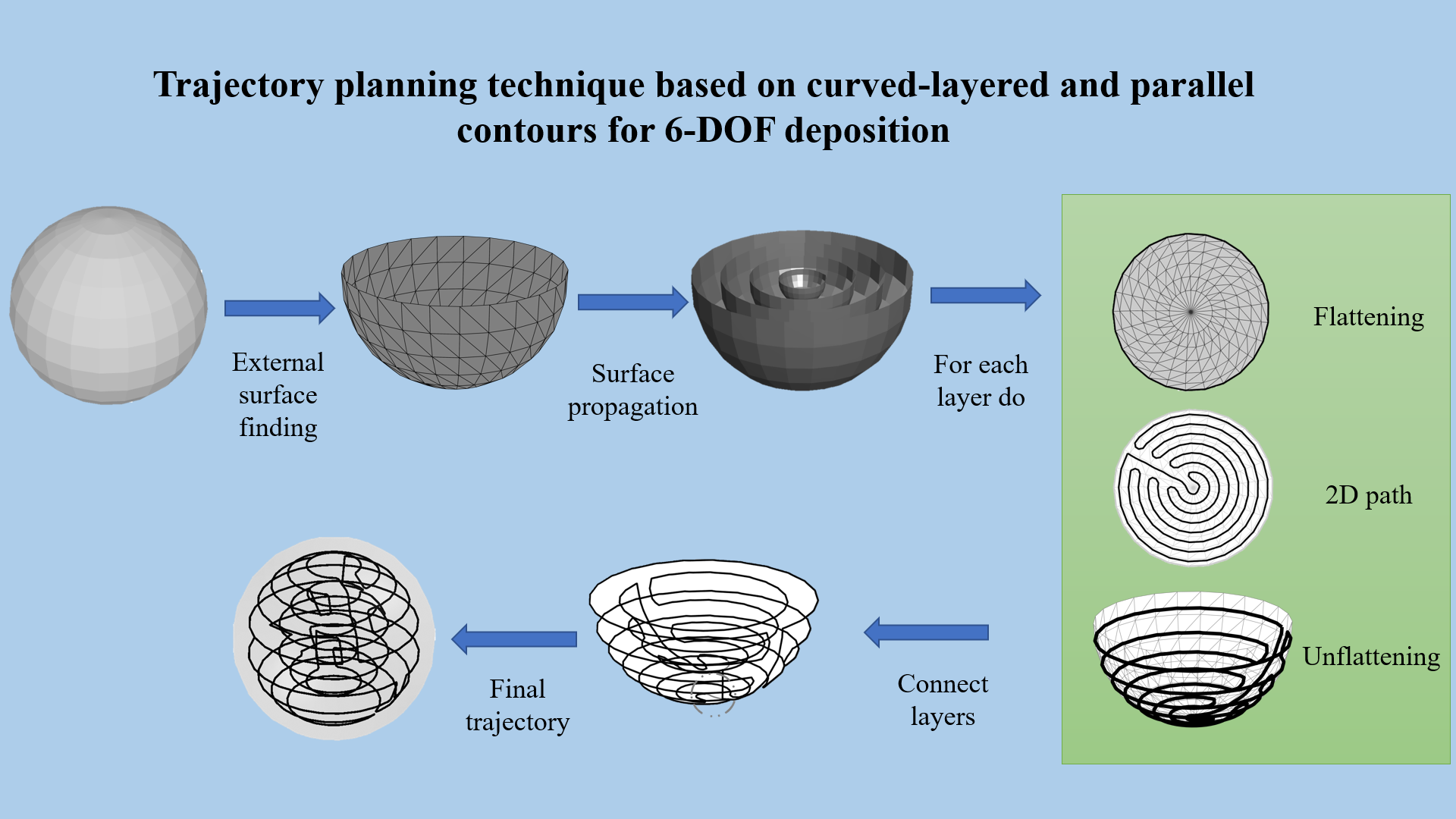
The manufacture of solids using material deposition has boomed in recent years, and its use has grown steadily, generating challenges to improve printing. In addition, new mechanisms of six degrees of freedom have been designed focused on manufacturing parts, creating problems such as their trajectory planning. Therefore, this paper presents a new path-planning methodology based on the contour-parallel pattern and, through propagation techniques and geodesic flattening, transforms curved spaces into flat contours and vice versa. Furthermore, this methodology generates continuous trajectories for manufacturing parts for mechanisms of six degrees of freedom, focused on improving the surface quality and the quantity of deposited material, eliminating unwanted effects such as ladder and stringing, which usually occur in 3D printing.
Downloads
References
T. Vaneker, A. Bernard, G. Moroni, I. Gibson, and Y. Zhang, “Design for additive manufacturing: Framework and methodology,” CIRP Annals, vol. 69, no. 2, pp. 578–599, 2020.
A. Mostafaei, A. M. Elliott, J. E. Barnes, F. Li, W. Tan, C. L. Cramer, P. Nandwana, and M. Chmielus, “Binder jet 3d printing—process parameters, materials, properties, modeling, and challenges,” Progress in Materials Science, vol. 119, p. 100707, jun 2021.
A. Nazir, K. M. Abate, A. Kumar, and J.-Y. Jeng, “A state-of-the-art review on types, design, optimization, and additive manufacturing of cellular structures,” The International Journal of Advanced Manufacturing Technology, vol. 104, pp. 3489–3510, jul 2019.
A. Gubankov and I. Gornostaev, “Comparison study of different types of setting reference movements for mechatronic objects by parametric splines,” in 2022 International Conference on Ocean Studies (ICOS), IEEE, oct 2022.
K. L. Ameta, V. S. Solanki, V. Singh, A. P. Devi, R. Chundawat, and S. Haque, “Critical appraisal and systematic review of 3d and 4d printing in sustainable and environment-friendly smart manufacturing technologies,” Sustainable Materials and Technologies, vol. 34, p. e00481, dec 2022.
D. Zhao and W. Guo, “Shape and performance controlled advanced design for additive manufacturing: A review of slicing and path planning,” Journal of Manufacturing Science and Engineering, vol. 142, nov 2019.
J. C. Guacheta-Alba, D. A. Nunez, M. Mauledoux, and O. F. Aviles, “Deposition toolpath pattern comparison: Contour-parallel and hilbert curve application,” International Journal of Mechanical Engineering and Robotics Research, pp. 542–548, 2022.
B. Zhou, T. Tian, J. Zhao, and D. Liu, “Tool-path continuity determination based on machine learning method,” The International Journal of Advanced Manufacturing Technology, vol. 119, pp. 403–420, nov 2021.
W. Xu, H. Xu, Q. Li, P. Zhang, L. Yang, and W. Wang, “Stress-based path planning on quad mesh for additive manufacturing,” SSRN Electronic Journal, 2022.
J. Xu, Y. Sun, and L. Zhang, “A mapping-based approach to eliminating self-intersection of offset paths on mesh surfaces for CNC machining,” Computer-Aided Design, vol. 62, pp. 131–142, may 2015.
H. Zhang, Y. Yao, Y. Ma, M. Lackner, and Y. Jiang, “A 3d printing toolpath generation strategy based on the partition of principal stress field for fused filament fabrication,” The International Journal of Advanced Manufacturing Technology, vol. 122, pp. 1719–1735, aug 2022.
F. Liang, C. Kang, Z. Lu, and F. Fang, “Iso-scallop tool path planning for triangular mesh surfaces in multi-axis machining,” Robotics and Computer-Integrated Manufacturing, vol. 72, p. 102206, dec 2021.
A. Bacciaglia, A. Ceruti, and A. Liverani, “A systematic review of voxelization method in additive manufacturing,” Mechanics and Industry, vol. 20, no. 6, p. 630, 2019.
C. Tomassoni, O. A. Peverini, G. Venanzoni, G. Addamo, F. Paonessa, and G. Virone, “3d printing of microwave and millimeter-wave filters: Additive manufacturing technologies applied in the development of highperformance filters with novel topologies,” IEEE Microwave Magazine, vol. 21, pp. 24–45, jun 2020.
G. Peyré, “The numerical tours of signal processing,” Computing in Science and Engineering, vol. 13, pp. 94–97, jul 2011.
M. Mehrpouya, A. Dehghanghadikolaei, B. Fotovvati, A. Vosooghnia, S. S. Emamian, and A. Gisario, “The potential of additive manufacturing in the smart factory industrial 4.0: A review,” Applied Sciences, vol. 9, p. 3865, sep 2019.
J. Jiang, X. Xu, and J. Stringer, “Optimization of process planning for reducing material waste in extrusion based additive manufacturing,” Robotics and Computer-Integrated Manufacturing, vol. 59, pp. 317–325, oct 2019.
H. Zeng, M. Feng, J. Zhuang, R. Cai, Y. Xie, and J. Li, “3d printing and free-form surface coating based on 6-DOF robot,” in 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, dec 2019.
D. Kralji´c and R. Kamnik, “Trajectory planning for additive manufacturing with a 6-DOF industrial robot,” in Advances in Service and Industrial Robotics, pp. 456–465, Springer International Publishing, sep 2018.
Y. Weng, N. A. N. Mohamed, B. J. S. Lee, N. J. H. Gan, M. Li, M. J. Tan, H. Li, and S. Qian, “Extracting BIM information for lattice toolpath planning in digital concrete printing with developed dynamo script: A case study,” Journal of Computing in Civil Engineering, vol. 35, may 2021.
Y.-L. Cheng, C.-H. Chang, and C. Kuo, “Experimental study on leveling mechanism for material-jetting-type color 3d printing,” Rapid Prototyping Journal, vol. 26, pp. 11–20, jan 2020.
S. M. Abulnaga, E. A. Turk, M. Bessmeltsev, P. E. Grant, J. Solomon, and P. Golland, “Placental flattening via volumetric parameterization,” in Lecture Notes in Computer Science, pp. 39–47, Springer International Publishing, 2019.
Y. Kita and N. Kita, “Virtual flattening of a clothing surface by integrating geodesic distances from different three-dimensional views,” in Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, SCITEPRESS - Science and Technology Publications, 2019.
M. Budninskiy, G. Yin, L. Feng, Y. Tong, and M. Desbrun, “Parallel transport unfolding: A connection-based manifold learning approach,” SIAM Journal on Applied Algebra and Geometry, vol. 3, pp. 266–291, jan 2019.
P.-F. Zheng, Q. Liu, J.-D. Zhao, D.-J. Lin, and Q. An, “An algorithm for computing geodesic curve based on digital experiment of point clouds,” in Advances in Intelligent Systems and Computing, pp. 2282– 2294, Springer International Publishing, jul 2018.
D. Sarkar and K. Deyasi, “Computing the geodesic distance between two points in a polyhedral solid,” International Journal of Advanced Science and Engineering, vol. 6, pp. 21–24, jul 2019.
K. Crane, M. Livesu, E. Puppo, and Y. Qin, “A survey of algorithms for geodesic paths and distances,” 2020.
K. Huang, H. Gong, and X. Chen, “Study of ultra-precision turning path calculation of freeform surface with free contours,” The International Journal of Advanced Manufacturing Technology, vol. 121, pp. 5451– 5462, jul 2022.
H.-Y. Ma, C.-M. Yuan, and L.-Y. Shen, “Tool path planning with confined scallop height error using optimal connected fermat spirals,” Communications in Mathematics and Statistics, nov 2022.
P. Stavropoulos, K. Tzimanis, T. Souflas, and H. Bikas, “Knowledgebased manufacturability assessment for optimization of additive manufacturing processes based on automated feature recognition from cad models,” The International Journal of Advanced Manufacturing Technology, vol. 122, pp. 993–1007, Sep 2022.