Communication Delay in UAV Missions: A Controller Gain Analysis to Improve Flight Stability
Keywords:
Time-Delayed Control, Gain-schedule Analysis, Performance Indexes, Communication Delay, Aerial roboticsAbstract
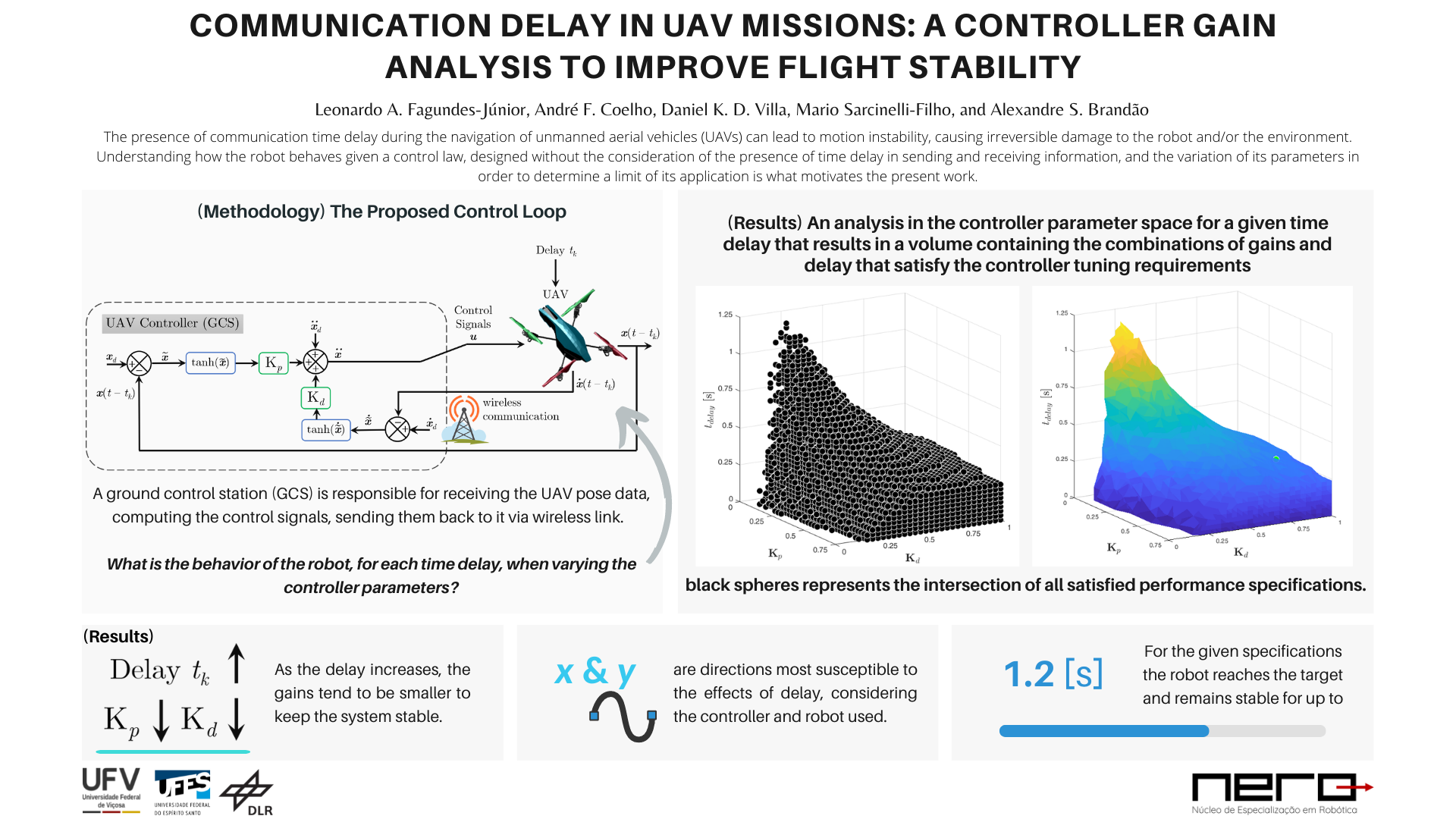
In real-world applications involving unmanned aerial vehicles (UAVs) the presence of communication delays can deteriorate the performance of flight control system or even cause instabilities. However, it is possible to improve the performance and ensure flight stability in the task execution by properly controlling the UAV considering the transport delay. This work analyzes the asymptotic convergence of a quadrotor, under time-delay in the communication with a ground control station. The effects of the communication delay, as well as the response-signal behavior of the quadrotors in the accomplishment of positioning missions are presented and analyzed by numerical simulations. The performance indexes (IAE and ITAE) assist the estimation of the acceptable time-delay limit. The results show that the adopted controller, without any adaptive tuning, can handle a delay of up to 1.2 seconds, which means a blind time of 40 packets of information. As expected, the longer the delay, the lower the gains. Consequently, as the delay increases, the quadrotor takes longer to accomplish the mission carefully and successfully.
Downloads
References
S. Al Issa and I. Kar, “Design and implementation of event-triggered adaptive controller for commercial mobile robots subject to input delays and limited communications,” Control Engineering Practice, vol. 114, p. 104865, 2021.
Z. Qiao, J. Zhang, X. Qu, and J. Xiong, “Dynamic self-organizing leader-follower control in a swarm mobile robots system under limited communication,” IEEE Access, vol. 8, pp. 53 850–53 856, 2020.
Z. Wang, H.-K. Lam, B. Xiao, Z. Chen, B. Liang, and T. Zhang, “Event- triggered prescribed-time fuzzy control for space teleoperation systems subject to multiple constraints and uncertainties,” IEEE Transactions on Fuzzy Systems, 2020.
Y. Ji and Y. Gong, “Adaptive control for dual-master/single-slave non-linear teleoperation systems with time-varying communication delays,” IEEE Transactions on Instrumentation and Measurement, 2021.
T. Muskardin, A. Coelho, E. R. Della Noce, A. Ollero, and K. Kon-dak, “Energy-based cooperative control for landing fixed-wing uavs on mobile platforms under communication delays,” IEEE Robotics and
Automation Letters, vol. 5, no. 4, pp. 5081–5088, 2020.
H. Singh, M. Panzirsch, A. Coelho, and C. Ott, “Proxy-based approach for position synchronization of delayed robot coupling without sacrificing performance,” IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6599–6606, 2020.
S. Roy, I. N. Kar, and J. Lee, “Toward position-only time-delayed control for uncertain euler–lagrange systems: Experiments on wheeled mobile robots,” IEEE Robotics and Automation Letters, vol. 2, no. 4, pp. 1925–1932, 2017.
Y. Xu, D. Li, D. Luo, and Y. You, “Affine formation maneuver tracking control of multiple second-order agents with time-varying delays,” Science China Technological Sciences, vol. 62, no. 4, pp. 665–676, 2019.
A. Zhang, D. Zhou, M. Yang, and P. Yang, “Finite-time formation control for unmanned aerial vehicle swarm system with time-delay and input saturation,” IEEE Access, vol. 7, pp. 5853–5864, 2018.
Y. Kali, J. Rodas, R. Gregor, M. Saad, and K. Benjelloun, “Attitude tracking of a tri-rotor uav based on robust sliding mode with time delay estimation,” in 2018 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2018, pp. 346–351.
Y. Kartal, K. Subbarao, N. R. Gans, A. Dogan, and F. Lewis, “Distributed backstepping based control of multiple uav formation flight subject to time delays,” IET Control Theory & Applications, vol. 14, no. 12, pp. 1628–1638, 2020.
J. Zhang, X. Zhu, and Z. Zhou, “Design of time delayed control systems in uav using model based predictive algorithm,” in 2010 2nd International Asia Conference on Informatics in Control, Automation
and Robotics (CAR 2010), vol. 1. IEEE, 2010, pp. 269–272.
J. M. Hansen, T. I. Fossen, and T. A. Johansen, “Nonlinear observer for ins aided by time-delayed gnss measurements: Implementation and uav experiments,” in 2015 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2015, pp. 157–166.
L. Han, X. Dong, Q. Li, and Z. Ren, “Formation tracking control for time-delayed multi-agent systems with second-order dynamics,” Chinese journal of aeronautics, vol. 30, no. 1, pp. 348–357, 2017.
Fialho Coelho, Andre, “System Identification and Parameter Space Con- trol Design for a Small Unmanned Aircraft,” https://elib.dlr.de/114216/, 2017, online; accessed 10 January 2022.
L. V. Santana, A. S. Brandao, and M. Sarcinelli-Filho, “Outdoor way- point navigation with the ar. drone quadrotor,” in 2015 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2015, pp.
–311.
A. S. Brandão, M. Sarcinelli-Filho, and R. Carelli, “High-level un- deractuated nonlinear control for rotorcraft machines,” in 2013 IEEE International Conference on Mechatronics (ICM). IEEE, 2013, pp.
–285.
A. Hernandez, H. Murcia, C. Copot, and R. De Keyser, “Model predictive path-following control of an ar. drone quadrotor,” in Memorias del XVI Congreso Latinoamericano de Control Automatico, Proceedings,
, pp. 618–23.
A.-R. Merheb, H. Noura, and F. Bateman, “Emergency control of ar drone quadrotor uav suffering a total loss of one rotor,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 2, pp. 961–971, 2017.
S. Piskorski and N. Brulez, “Ar. drone developer guide parrot. sdk version 2.0,” tech. rep., 2012.
L. V. Santana, A. S. Brandão, and M. Sarcinelli-Filho, “Navigation and cooperative control using the ar. drone quadrotor,” Journal of Intelligent & Robotic Systems, vol. 84, no. 1, pp. 327–350, 2016.
M. F. S. Rabelo, A. S. Brandão, and M. Sarcinelli-Filho, “Centralized control for an heterogeneous line formation using virtual structure approach,” in 2018 Latin American Robotic Symposium, 2018 Brazilian
Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE). IEEE, 2018, pp. 135–140.
L. Fagundes-Junior, M. Canesche, R. Ferreira, and A. Brandão, “A nonlinear uav control tuning under communication delay using hpc strategies in parameters space,” in Anais do XXII Simpósio em Sistemas Computacionais de Alto Desempenho. SBC, 2021, pp. 228–239.
D. D. Siljak, “Parameter space methods for robust control design: a guided tour,” in 1988 American Control Conference. IEEE, 1988, pp. 783–783.
J. Geromel, P. D. Peres, and J. Bernussou, “On a convex parameter space method for linear control design of uncertain systems,” SIAM Journal on Control and Optimization, vol. 29, no. 2, pp. 381–402, 1991.
S. Zhu, S. Y. Gelbal, X. Li, M. R. Cantas, B. Aksun-Guvenc, and L. Guvenc, “Parameter space and model regulation based robust, scalable and replicable lateral control design for autonomous vehicles,” in 2018 IEEE conference on decision and control (CDC). IEEE, 2018, pp. 6963–6969.
F. Ma, J. Wang, Y. Yu, L. Wu, Z. Liu, B. Aksun-Guvenc, and L. Guvenc, “Parameter-space-based robust control of event-triggered heterogene-ous platoon,” IET Intelligent Transport Systems, 2021.
T. Krajník, V. Vonásek, D. Fišer, and J. Faigl, “Ar-drone as a platform for robotic research and education,” in International conference on research and education in robotics. Springer, 2011, pp. 172–186.