Intercontinental Bilateral-by-Phases Teleoperation of a Humanoid Robot
Keywords:
Locomotion, manipulation, intercontinental bilateral teleoperation, time delay, humanoid robotAbstract
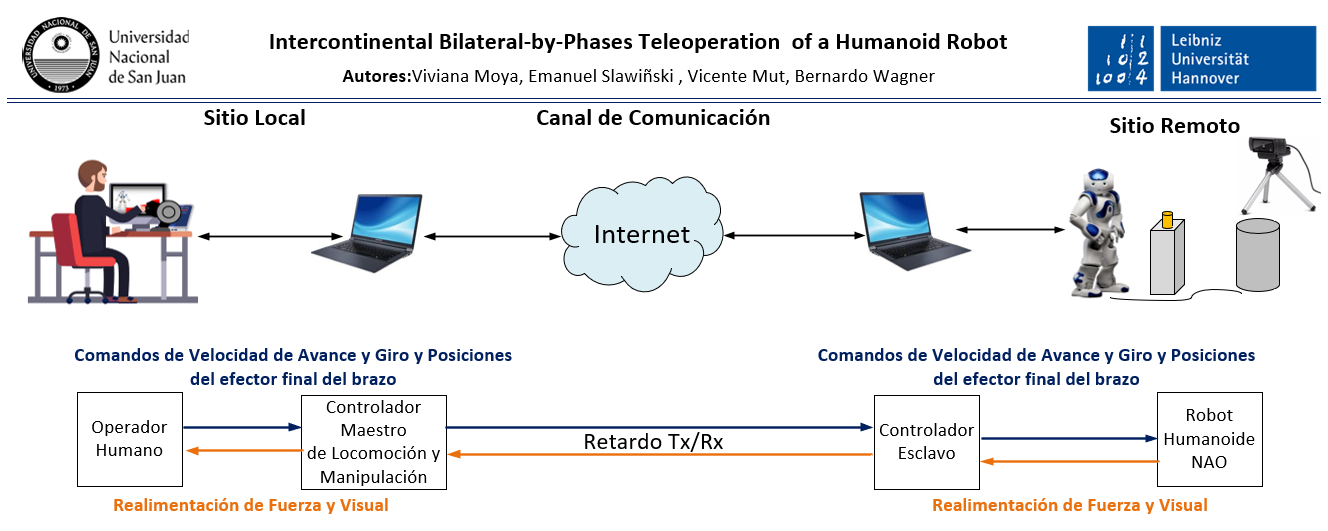
This document proposes a control scheme applied to delayed bilateral-by-phases teleoperation of the locomotion and manipulation of a humanoid robot, where each phase works depending on the decision of the human operator. Besides, balance control, adaptive controller, and force feedback are applied. The implementation is described and the results obtained from experiments of intercontinental teleoperation for a pick and place task with a NAO robot-driven at distance with a haptic device, are shown and summarized.
Downloads
References
P. Vadakkepat, and A. Goswami, emph{Humanoid Robotics: A Reference}, Springer Netherlands, 2019, pp.2676.
E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi, and B. Morris, emph{Feedback Control of Dynamic Bipedal Robot Locomotion.} Crc Press, Boca Raton, FL, 2007, pp. 528.
L. Penco, N. Scianca, V. Modugno, L. Lanari, G. Oriolo and S. Ivaldi, ``"A Multimode Teleoperation Framework for Humanoid Loco-Manipulation: An Application for the iCub Robot", emph{IEEE Robotics & Automation Magazine}, vol. 26, no. 4, pp. 73-82, Dec. 2019.
K. Harada et al., ``"A Humanoid Robot Carrying a Heavy Object", in emph{ Proceedings of the 2005 IEEE International Conference on Robotics and Automation}, Barcelona, Spain, 2005, pp. 1712-1717.
T. B. Sheridan, "``Space teleoperation through time delay: review and prognosis", emph{ IEEE Transactions on Robotics and Automation}, vol. 9, no. 5, pp. 592-606, Oct. 1993.
J. Ramos and S. Kim, ``"Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation", emph{Sci. Robot.}, vol. 4, no. 35, pp. 1--12, Oct 2019.
P. Kremer et al., ``"Multimodal telepresent control of DLR's Rollin' JUSTIN", 2009 in emph{ IEEE International Conference on Robotics and Automation}, Kobe, 2009, pp. 1601-1602.
D. Kim, B.-J. You, and S.-R. Oh, ``"Whole Body Motion Control Framework for Arbitrarily and Simultaneously Assigned Upper-Body Tasks and Walking Motion", in Modeling, Simulation and Optimization of Bipedal Walking, K. Mombaur and K. Berns, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2013, pp. 87–98.
T. Ando, T. Watari and R. Kikuuwe, "``Master-Slave Bipedal Walking and Semi-Automatic Standing Up of Humanoid Robots", in emph{2020 IEEE/SICE International Symposium on System Integration (SII),} Honolulu, HI, USA, 2020, pp. 360--365.
J. J. O. Barros, V. M. F. d. Santos and F. M. T. P. d. Silvao, ``"Bimanual Haptics for Humanoid Robot Teleoperation Using ROS and V-REP", in emph{2015 IEEE International Conference on Autonomous Robot Systems and Competitions,} Vila Real, Portugal, 2015, pp. 174--179.
A. D. Ames, `"`Human-inspired control of Bipedal walking robots", emph{IEEE Trans. Automat. Contr.}, vol. 59, no. 5, pp. 1115--1130, May 2014.
A. D. Ames, K. Galloway, K. Sreenath, and J. W. Grizzle, `"`Rapidly exponentially stabilizing control lyapunov functions and hybrid zero dynamics", emph{IEEE Trans. Automat. Contr.}, vol. 59, no. 4, pp. 876--891, April 2014.
M. S. Motahar, S. Veer, and I. Poulakakis, ``"Composing limit cycles for motion planning of 3D bipedal walkers", in emph{IEEE 55th Conf. Decis. Control. CDC 2016,} Las Vegas, NV, 2016, pp. 6368-6374.
C. L. Shih, J. W. Grizzle, and C. Chevallereau, ``"From stable walking to steering of a 3D bipedal robot with passive point feet", emph{Robotica}, vol. 30, no. 7, pp. 1119--1130, Dec. 2012.
T. Yang, W. Zhang, X. Chen, Z. Yu, L. Meng, and Q. Huang, ``"Turning gait planning method for humanoid robots", emph{Appl. Sci.}, vol. 8, no. 8, pp. 1--16, July 2018.
Q. Nguyen and K. Sreenath,``"L1 adaptive control for bipedal robots with control Lyapunov function based quadratic programs", emph{ 2015 American Control Conference (ACC)}, Chicago, IL, pp. 862-867, 2015.
E. Lavretsky, T. E. Gibson, and A. M. ``Annaswamy. "Projection operator in adaptive systems", [Online]. Available: http://arxiv.org/abs/1112.4232.
V. Moya, E. Slawinski, and V. Mut, "``Delayed Bilateral Teleoperation of the Speed and Turn Angle of a Bipedal Robot", emph{Robotica}, pp. 1--19, July 2020.
V. Moya, E. Slawi˜nski, V. Mut, V, “Delayed Teleoperation with Force
Feedback of a Humanoid Robot”, emph{International Journal of Automation and
Computing}, pp 1--14, March 2021.
C. C. Hua and X. P. Liu, ``"Delay-dependent stability criteria of teleoperation systems with asymmetric time-varying delays", emph{IEEE Trans. Robot.}, vol. 26, no. 5, pp. 925--932, Oct. 2010.
E. Nu˜no, R. Ortega, N. Barabanov, L. Basa˜nez. "A Globally Stable PD Controller for Bilateral Teleoperators". emph{IEEE Transactions on Robotics},vol. 24, no. 3, pp. 753–758, 2008.