Dual Coordination for Bilateral Teleoperation of a Mobile Robot with Time Varying Delay
Keywords:
Bilateral teleoperation, force-velocity coordination, force feedback, mobile robot, time delayAbstract
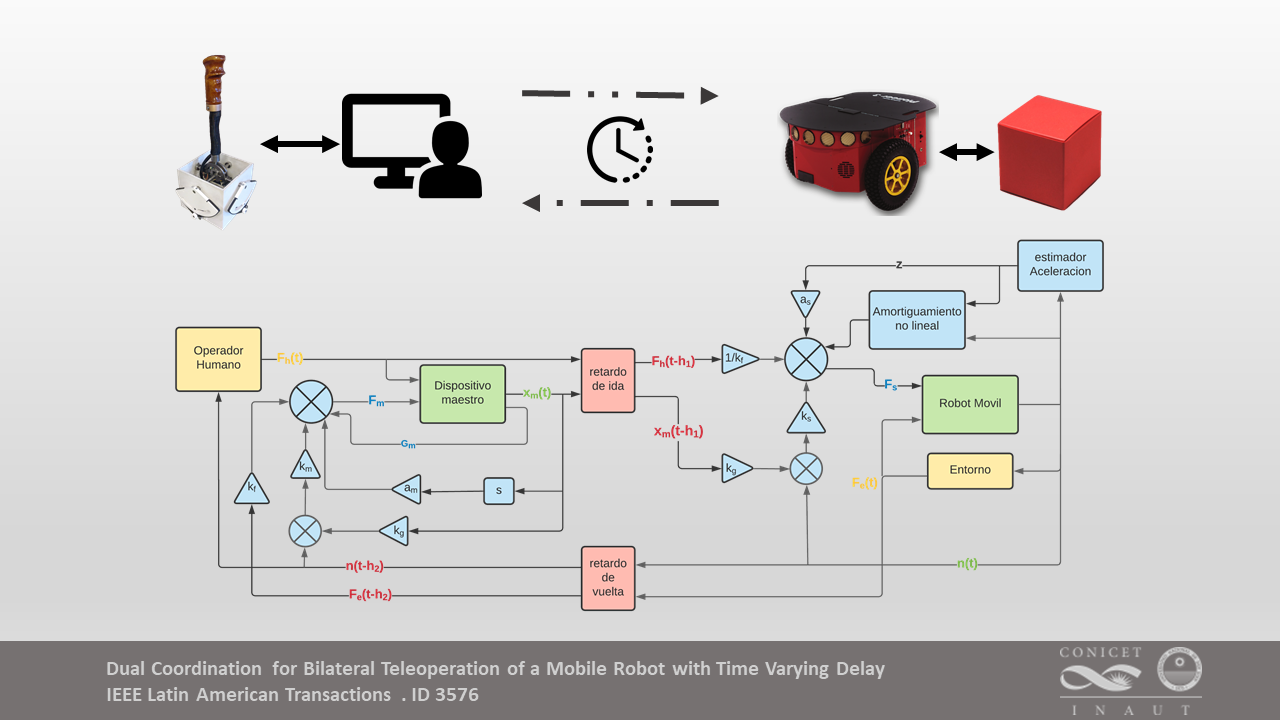
This paper proposes a P+d like control scheme and calibration guidelines addressed to achieve stable dual coordination of force and motion in a bilateral teleoperation system of a mobile robot considering time-varying delays. Different from the state of the art, the proposed scheme achieves a dual coordination combining a relation of linear and nonlinear damping and force feedback gain depending on the human operator parameters and time delays. As a theoretical result, we get that the injected linear damping strongly depends on the time delay, the nonlinear damping compensates the Coriolis forces, while the convergence state depends on the human operator and environment force, but it is independent of the time delay. Finally, a robot teleoperation experiment is carried out to evaluate the performance of force and motion errors obtained in practice.
Downloads
References
R. Sipahi, S.-I. Niculescu, C. T. Abdallah, W. Michiels, and K. Gu, “Stability and stabilization of systems with time delay,” IEEE Control Systems Magazine, vol. 31, no. 1, pp. 38–65, 2011.
E. J. Rodriguez-Seda, “Transparency compensation for bilateral teleoperators with time-varying communication delays,” in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014, pp. 4375–4380.
Y. Li, Y. Yin, and D. Zhang, “Adaptive task-space synchronization control of bilateral teleoperation systems with uncertain parameters and communication delays,” IEEE Access, vol. 6, pp. 5740–5748, 2018.
D. Lee and K. Huang, “Passive-set-position-modulation framework for interactive robotic systems,” IEEE Transactions on Robotics, vol. 26, no. 2, pp. 354–369, 2010.
C.-C. Hua and X. P. Liu, “Delay-dependent stability criteria of teleoperation systems with asymmetric time-varying delays,” IEEE Transactions on Robotics, vol. 26, no. 5, pp. 925–932, 2010.
D. Santiago, E. Slawi˜nski, and V. Mut, “Delayed trilateral teleoperation of a mobile robot,” Mathematical Problems in Engineering, vol. 2017, 2017.
H. Yang, Z. Zuo, and D. Lee, “Haptic tele-driving of wheeled mobile robot over the internet via pspm approach: theory and experiment,” Advanced Robotics, vol. 32, no. 13, pp. 683–696, 2018.
E. Nuno, I. Sarras, and L. Basanez, “Consensus in networks of nonidentical euler–lagrange systems using p+ d controllers,” IEEE Transactions on Robotics, vol. 29, no. 6, pp. 1503–1508, 2013.
D. D. Santiago, E. Slawi˜nski, and V. A. Mut, “Stable delayed bilateral teleoperation of mobile manipulators,” Asian Journal of Control, vol. 19, no. 3, pp. 1140–1152, 2017.
D. Santiago, E. Slawinski, and V. Mut, “Human-inspired stable bilateral teleoperation of mobile manipulators,” ISA transactions, vol. 95, pp. 392–404, 2019.
T. M. Lam, M. Mulder, and M. M. Van Paassen, “Haptic feedback in uninhabited aerial vehicle teleoperation with time delay,” Journal of guidance, control, and dynamics, vol. 31, no. 6, pp. 1728–1739, 2008.
E. Slawi˜nski, D. Santiago, and V. Mut, “Control for delayed bilateral teleoperation of a quadrotor,” ISA transactions, vol. 71, pp. 415–425, 2017.
M. Shahbazi, S. F. Atashzar, M. Tavakoli, and R. V. Patel, “Positionforce domain passivity of the human arm in telerobotic systems,” IEEE/ASME Transactions on Mechatronics, vol. 23, no. 2, pp. 552–562, 2018.
S. Islam, X. P. Liu, and A. El Saddik, “Teleoperation systems with symmetric and unsymmetric time varying communication delay,” IEEE Transactions on Instrumentation and Measurement, vol. 62, no. 11, pp. 2943–2953, 2013.
D. A. Lawrence, “Stability and transparency in bilateral teleoperation,” IEEE transactions on robotics and automation, vol. 9, no. 5, pp. 624– 637, 1993.
E. Slawinski, V. A. Mut, P. Fiorini, and L. R. Salinas, “Quantitative absolute transparency for bilateral teleoperation of mobile robots,” IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, vol. 42, no. 2, pp. 430–442, 2011.
M. Franken, S. Stramigioli, S. Misra, C. Secchi, and A. Macchelli, “Bilateral telemanipulation with time delays: A two-layer approach combining passivity and transparency,” IEEE transactions on robotics, vol. 27, no. 4, pp. 741–756, 2011.
F. Hashemzadeh and M. Tavakoli, “Position and force tracking in nonlinear teleoperation systems under varying delays.” Robotica, vol. 33, no. 4, pp. 1003–1016, 2015.
K. Mohammadi, H. A. Talebi, and M. Zareinejad, “A novel position and force coordination approach in four channel nonlinear teleoperation,” Computers & Electrical Engineering, vol. 56, pp. 688–699, 2016.
E. Slawi˜nski, V. Moya, D. Santiago, and V. Mut, “Force and position–velocity coordination for delayed bilateral teleoperation of a mobile robot,” Robotica, vol. 37, no. 10, pp. 1768–1784, 2019.
H. Li, L. Zhang, and K. Kawashima, “Operator dynamics for stability condition in haptic and teleoperation system: A survey,” The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 14, no. 2, p. e1881, 2018.
T. Inaba and Y. Matsuo, “Loop-shaping characteristics of a human operator in a compensatory manual control system,” in Analysis, Design and Evaluation of Man–Machine Systems 1995. Elsevier, 1995, pp. 661–665.
L. R. Salinas, D. Santiago, E. Slawi˜nski, V. A. Mut, D. Chavez, P. Leica, and O. Camacho, “P+ d plus sliding mode control for bilateral teleoperation of a mobile robot,” International Journal of Control, Automation and Systems, vol. 16, no. 4, pp. 1927–1937, 2018.
G. Temple, “Stability of motion. applications of lyapunov’s second method to differential systems and equations with delay.” The Mathematical Gazette, vol. 49, no. 367, pp. 114–114, 1965.
E. I. Verriest and W. Aggoune, “Stability of nonlinear differential delay systems,” Mathematics and computers in Simulation, vol. 45, no. 3-4, pp. 257–267, 1998.
E. Slawinski, V. Mut, and J. Postigo, “Stability of systems with timevarying delay,” Latin American applied research, vol. 36, no. 1, pp. 41–48, 2006.
Z. Wang, P. Liu, S. Ding, and Y. Liu, “A brief review on stability analysis of time delay systems based on lkf,” in 2018 13th World Congress on Intelligent Control and Automation (WCICA). IEEE, 2018, pp. 596–601.
E. Nuno, R. Ortega, N. Barabanov, and L. Basa˜nez, “A globally stable pd controller for bilateral teleoperators,” IEEE Transactions on Robotics, vol. 24, no. 3, pp. 753–758, 2008.
E. Slawi˜nski, V. Mut, and D. Santiago, “Pd-like controller for delayed bilateral teleoperation of wheeled robots,” International Journal of Control, vol. 89, no. 8, pp. 1622–1631, 2016.
R. Kelly, V. S. Davila, and J. A. L. Perez, Control of robot manipulators in joint space, S. S. . B. Media, Ed. Springer Science & Business Media, 2006.
A. Rosales, G. Scaglia, V. Mut, and F. di Sciascio, “Trajectory tracking of mobile robots in dynamic environments—a linear algebra approach,” Robotica, vol. 27, no. 7, pp. 981–997, 2009.