Multi-agent communication models for cooperative navigation in complex environments
Keywords:
multi agent systems, navigation, multi agent coordinationAbstract
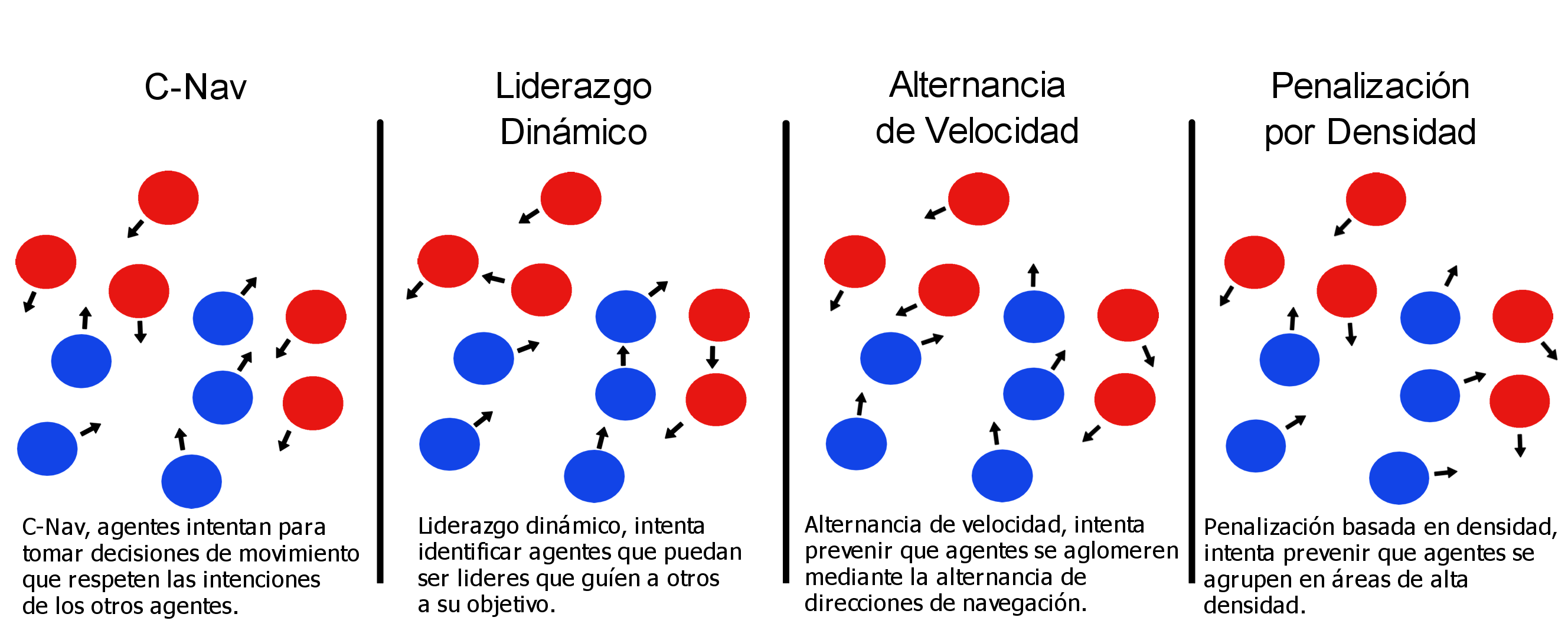
Multi-agent navigation in restricted environments presents significant challenges, since agents need to move to their goals in an efficient manner while avoiding collisions with both static and dynamic obstacles. Previously, C-Nav was proposed as a method that can effectively coordinate groups of agents in very restricted environments. In this work, we propose and evaluate three alternative communications models for C-Nav, that intend to provide more flexibility to the original method. The results of our experiments show that each of our proposed methods can lead to significant improvements over C-Nav in specific types of restricted environments.
Downloads
References
J. Yu and S. M. LaValle, “Structure and intractability of optimal multi-robot path planning on graphs,” in Twenty-Seventh AAAI Conference on Artificial Intelligence, 2013.
C. W. Reynolds, “Flocks, herds and schools: A distributed behavioral model,” in Proceedings of the 14th annual conference on Computer graphics and interactive techniques, 1987, pp. 25–34.
D. Helbing and P. Molnar, “Social force model for pedestrian dynamics”, Physical review E, vol. 51, no. 5, p. 4282, 1995.
J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body Collision Avoidance,” in Robotics Research, C. Pradalier, R. Siegwart,and G. Hirzinger, Eds. Berlin, Heidelberg, 2011, pp. 3–19.
I. Karamouzas, B. Skinner, and S. J. Guy, “Universal power law governing pedestrian interactions”, Physical review letters, vol. 113,no. 23, p. 238701, 2014.
A. Garcimart ́ın, J. M. Pastor, C. Mart ́ın-G ́omez, D. Parisi, and I. Zu-riguel, “Pedestrian collective motion in competitive room evacuation”, Scientific reports, vol. 7, no. 1, p. 10792, 2017.
J. Godoy, S. J. Guy, M. Gini, and I. Karamouzas, “C-nav: Distributed coordination in crowded multi-agent navigation”, Robotics and Autonomous Systems, p. 103631, 2020.
O. B. Bayazit, J.-M. Lien, and N. M. Amato, “Better group behaviors in complex environments using global Roadmaps”, Artificial life, vol. 8, no. 8, p.362, 2003.
J. Funge, X. Tu, and D. Terzopoulos, “Cognitive modeling: knowledge, reasoning and planning for intelligent characters,” in 26th Annual Conference on Computer Graphics and Interactive Techniques, 1999,pp. 29–38.
S. J. Guy, J. Chhugani, S. Curtis, P. Dubey, M. C. Lin, and D. Manocha, “Pledestrians: A least-effort approach to crowd simulation”, in Symposium on Computer Animation, 2010, pp. 119–128.
S. J. Guy, S. Kim, M. C. Lin, and D. Manocha, “Simulating heterogeneous crowd behaviors using personality trait theory,” in Proceedings of the 2011 ACM SIGGRAPH/Eurographics symposium on computer animation, 2011, pp. 43–52.
M. Popelov ́a, M. B ́ıda, C. Brom, J. Gemrot, and J. Tomek, “When acouple goes together: walk along steering,” in International Conference on Motion in Games. Springer, 2011, pp. 278–289.
M. Egerstedt and X. Hu, “A hybrid control approach to action coordination for mobile robots,”Automatica, vol. 38, no. 1, pp. 125–130,2002.
A. Filotheou, A. Nikou, and D. V. Dimarogonas, “Decentralized control of uncertain multi-agent systems with connectivity maintenance and collision avoidance,” in 2018 European Control Conference (ECC). IEEE, 2018, pp. 8–13.
R. Olfati-Saber and R. M. Murray, “Distributed cooperative control of multiple vehicle formations using structural potential functions,” in IFAC world congress, vol. 15, no. 1. Barcelona, Spain, 2002, pp. 242–248.
D. Cerotti, M. Gribaudo, and A. Bobbio, “Presenting dynamic markovian agents with a road tunnel application,” in 2009 IEEE International Symposium on Modeling, Analysis & Simulation of Computer and Telecommunication Systems. IEEE, 2009, pp. 1–4.
A. Bobbio, D. Cerotti, M. Gribaudo, M. Iacono, and D. Manini,“Markovian agent models: a dynamic population of interdependent markovian agents,” in Seminal Contributions to Modelling and Simulation. Springer, 2016, pp. 185–203.
J. H. Reif and H. Wang, “Social potential fields: A distributed behavioral control for autonomous robots”, Robotics and Autonomous Systems,vol. 27, no. 3, pp. 171–194, 1999.
P. Fiorini and Z. Shiller, “Motion planning in dynamic environments using velocity obstacles”, The International Journal of Robotics Re-search, vol. 17, no. 7, pp. 760–772, 1998.
S. Juniastuti, M. Fachri, S. M. S. Nugroho, and M. Hariadi, “Crowd navigation using leader-follower algorithm based reciprocal velocity obstacles,” in 2016 International Symposium on Electronics and Smart Devices (ISESD). IEEE, 2016, pp. 148–152.
F. Muhammad, S. Juniastuti, S. M. S. Nugroho, and M. Hariadi, “Crowds evacuation simulation on heterogeneous agent using agent-based reciprocal velocity obstacle”, in 2018 International Seminar on Intelligent Technology and Its Applications (ISITIA). IEEE, 2018, pp.275–280.
D. Hennes, D. Claes, W. Meeussen, and K. Tuyls, “Multi-robot collision avoidance with localization uncertainty,” 2012, pp. 147–154.
J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, and R. Sieg-wart, “Optimal reciprocal collision avoidance for multiple non-holonomic robots,” in Distributed Autonomous Robotic Systems. Springer, 2013, pp. 203–216.
A. Bojeri and G. Iacca, “Evolutionary optimization of drone trajectories based on optimal reciprocal collision avoidance,” in 2020 27th Conference of Open Innovations Association (FRUCT).IEEE, 2020, pp.18–26.
S. Curtis, S. Guy, B. Zafar, and D. Manocha, “Virtual Tawaf: A case study in simulating the behavior of dense, heterogeneous crowds,” in 2011 IEEE International Conference on Computer Vision Workshops, ICCV Workshops 2011, Dec. 2011, pp. 128–135.
R. Ostos, F. F. Ramos, B. Castillo, and V. G. Felix, “Selection of coordination mechanisms in intelligent environments,”IEEE Latin America Transactions, vol. 13, no. 9, pp. 3120–3126, 2015.
C. Yu, M. Zhang, F. Ren, and X. Luo, “Emergence of social norms through collective learning in networked agent societies,” in Proceedings of the 2013 international conference on Autonomous agents and multi-agent systems, 2013, pp. 475–482.
C. I. Mavrogiannis, W. B. Thomason, and R. A. Knepper, “Social momentum: A framework for legible navigation in dynamic multi-agent environments,” in Proceedings of the 2018 ACM/IEEE InternationalConference on Human-Robot Interaction, 2018, pp. 361–369.
C. W. Warren, “Multiple robot path coordination using artificial potential fields,” in Proceedings of the IEEE International Conference on Robotics and Automation. IEEE, 1990, pp. 500–505.
R. Gayle, W. Moss, M. C. Lin, and D. Manocha, “Multi-robot coordination using generalized social potential fields,” in 2009 IEEE International Conference on Robotics and Automation. IEEE, 2009, pp.106–113.
S. Iqbal and F. Sha, “Actor-attention-critic for multi-agent reinforcement learning,” in International Conference on Machine Learning. PMLR,2019, pp. 2961–2970.
Y. Jin, Y. Zhang, J. Yuan, and X. Zhang, “Efficient multi-agent cooperative navigation in unknown environments with interlaced deep reinforcement learning,” in ICASSP 2019-2019 IEEE International Conferenceon Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2019,pp. 2897–2901.
L. He, J. Pan, W. Wang, and D. Manocha, “Proxemic group behaviors using reciprocal multi-agent navigation,” in 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 292–297.
F. Ducatelle, G. A. Di Caro, A. F ̈orster, M. Bonani, M. Dorigo, S. Magnenat, F. Mondada, R. O’Grady, C. Pinciroli, P. R ́etornazet al.,“Cooperative navigation in robotic swarms”, Swarm Intelligence, vol. 8,no. 1, pp. 1–33, 2014.
J. Godoy, T. Chen, S. J. Guy, I. Karamouzas, and M. Gini, “ALAN: adaptive learning for multi-agent navigation”, Autonomous Robots, vol. 42,no. 8, pp. 1543–1562, 2018.
A. Vega, L. J. Manso, D. G. Macharet, P. Bustos, and P. Nunez, “Socially aware robot navigation system in human-populated and interactive environments based on an adaptive spatial density function and space affordances”, Pattern Recognition Letters, vol. 118, pp. 72–84, 2019.
P. Henry, C. Vollmer, B. Ferris, and D. Fox, “Learning to navigate through crowded environments”, in 2010 IEEE International Conference on Robotics and Automation. IEEE, 2010, pp. 981–986