Integral Action and Reduced-Order Observer-Based Control for a Magnetic Levitation System
Keywords:
Magnetic Levitation, Nonlinear control, Feedback Control, State ObserverAbstract
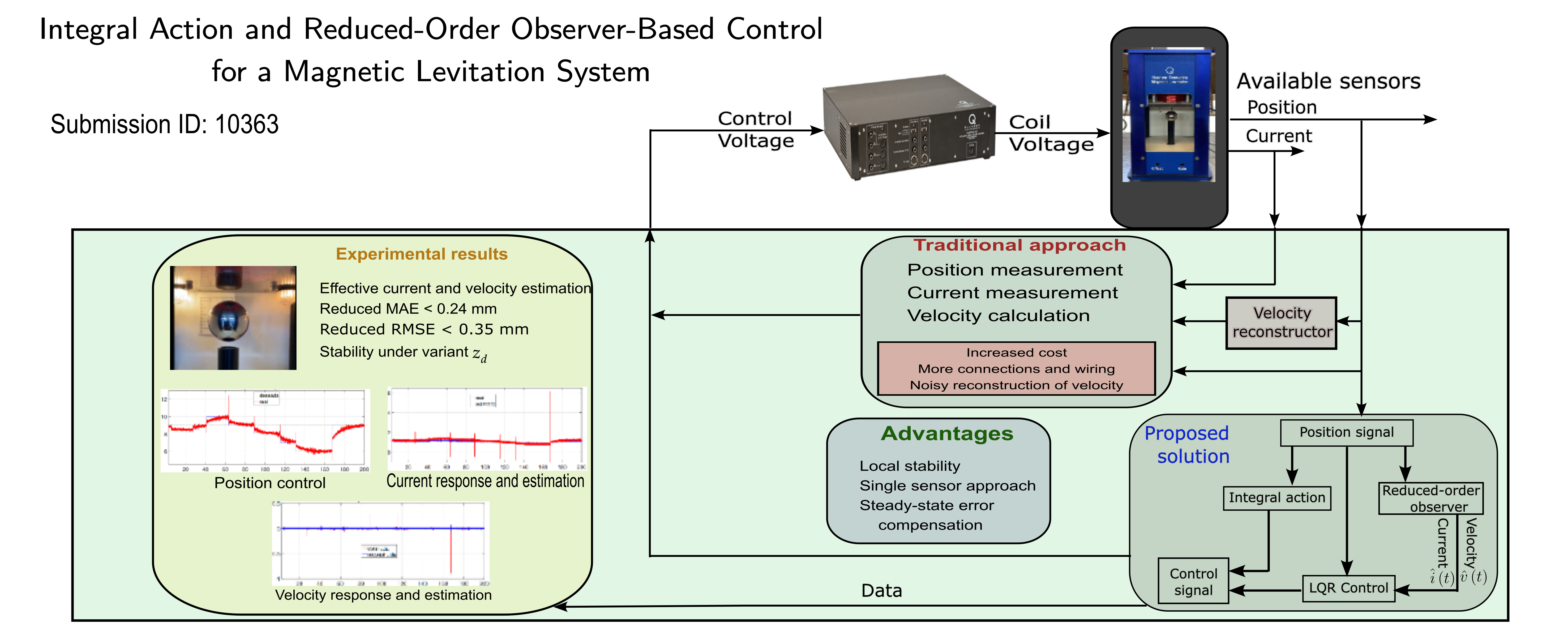
This paper presents the experimental implementation and validation of a single-sensor control architecture for a nonlinear magnetic levitation system based on well-established linear control techniques. The main contribution is the practical demonstration that accurate levitation control can be achieved using only position measurement, thereby simplifying the sensing hardware and reducing implementation costs compared to traditional multi-sensor approaches. An integral action is incorporated into the linear quadratic regulator (LQR) framework to ensure zero steady-state error under step-type reference variations. The complete closed-loop system stability is guaranteed by the separation principle between the controller and the observer dynamics. The proposed design was experimentally validated on a Quanser Magnetic Levitation platform, achieving a low steady-state position error and current estimation error. The experimental results on a Quanser platform demonstrate the practical feasibility of the single-sensor architecture, achieving position errors below 0.35 mm and confirming that classical LQR and reduced-order observer techniques can be effectively integrated for cost-effective magnetic levitation control.
Downloads
References
R. Goodall, "Dynamic characteristics in the design of maglev suspensions," Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, vol. 208, no. 1, pp. 33–41, 1994. [Online]. Available: https://doi.org/10.1243/PIME_PROC_1994_208_231_02
D. M. Rote and Y. Cai, "Review of dynamic stability of repulsive–force maglev suspension systems," IEEE Transactions on Magnetics, vol. 38, no. 2, pp. 1383–1390, 2002. [Online]. Available: https://doi.org/10.1109/20.996030
Q. Zhu, S.-M. Wang, and Y.-Q. Ni, "A review of levitation control methods for low-and medium-speed maglev systems," Buildings, vol. 14, no. 3, p. 837, 2024. [Online]. Avaliable: https://doi.org/10.3390/buildings14030837
B. Li, C. Zhao, X. Li, and Z. Long, "Dynamics modeling analysis and experiment of the guidance control system of high-speed maglev train," IEEE Access, vol. 8, pp. 206 207–206 221, 2020. [Online]. Available: https://doi.org/10.1109/ACCESS.2020.3038252
X. Jia-yang and D. Zi-gang, "Research progress of high-speed maglev rail transit," Journal of Traffic and Transportation Engineering, vol. 21, no. 1, pp. 177–198, 2021. [Online]. Available: https://doi.org/10.19818/j.cnki.1671-1637.2021.01.008
Y. Eroglu, "Sliding mode and pid based tracking control of magnetic levitation plant and hil tests," Master's thesis, Abdullah Gul Universitesi, 2016. [Online]. Available: https://hdl.handle.net/20.500.12573/305
W. Barie and J. Chiasson, "Linear and nonlinear state-space controllers for magnetic levitation," International Journal of systems science, vol. 27, no. 11, pp. 1153–1163, 1996. [Online]. Available: https://doi.org/10.1080/00207729608929322
I. Ahmad and M. A. Javaid, "Nonlinear model and controller design for magnetic levitation system," Recent Advances in Signal Processing, Robotics and Automation, pp. 324–328, 2010. [Online]. Available: https://dl.acm.org/doi/abs/10.5555/1807817.1807874
A. E. Hajjaji and M. Ouladsine, "Modeling and nonlinear control of magnetic levitation systems," IEEE Transactions on Industrial Electronics, vol. 48, no. 4, pp. 831–838, 2001. [Online]. Available: https://doi.org/10.1109/41.937416
F. J. Lin, S. Y. Chen, and P. H. Shieh, "Intelligent sliding–mode control using rbfn for magnetic levitation system," IEEE Transactions on Industrial Electronics, vol. 54, no. 3, pp. 1752–1762, 2007. [Online]. Available: https://doi.org/10.1109/TIE.2007.894710
Y. Sun, J. Xu, G. Lin, and N. Sun, "Adaptive neural network control for maglev vehicle systems with time-varying mass and external disturbance," Neural Computing and Applications, vol. 35, no. 17, pp. 12 361–12 372, 2023. [Online]. Available: https://doi.org/10.1007/s00521-021-05874-2
R. J. Wai, J. D. Lee, and K. L. Chuang, "Real–time pid control strategy for maglev transportation system via particle swarm optimization," IEEE Transactions on Industrial Electronics, vol. 58, no. 2, pp. 629–646, 2010. [Online]. Available: https://doi.org/10.1109/TIE.2010.2046004
U. Sadek, A. Sarjas, A. Chowdhury, and R. Svecko, "Improved adaptive fuzzy backstepping control of a magnetic levitation system based on symbiotic organism search," Applied Soft Computing, vol. 56, pp. 19–33, 2017. [Online]. Available: https://doi.org/10.1016/j.asoc.2017.02.032
R. Morales, V. Feliu, and H. Sira-Ramírez, "Nonlinear control for magnetic levitation systems based on fast online algebraic identification of the input gain," IEEE Transactions on Control Systems Technology, on, vol. 19, no. 4, pp. 757–771, 2011. [Online]. Available: https://doi.org/10.1109/TCST.2010.2057511
R. Ortega, Passivity-based control of Euler-Lagrange systems: mechanical, electrical and electromechanical applications. Springer, 1998. [Online]. Available: https://doi.org/10.1007/978-1-4471-3603-3
A. Atassi and H. Khalil, "Separation results for the stabilization of nonlinear systems using different high-gain observer design," Systems and Control Letters, vol. 39, pp. 183–191, 2000. [Online]. Available: https://doi.org/10.1016/S0167-6911(99)00085-7
A. Levant, "Robust exact differentiation via sliding mode technique," Automatica, vol. 34, no. 3, pp. 379–384, 1998. [Online]. Available: https://doi.org/10.1016/S0005-1098(97)00209-4
C. Guerrero Tejada, M. A. Gonzalez-Olvera, J. Dávila, and J. C. Fabián-Pliego, "Maglev tracking control by a state-feedback with integral action and robust velocity reconstruction," Memorias del XVI Congreso Latinoamericano de Control Automático, CLCA 2014, 2014. [Online]. Available: https://amca.mx/memorias/amca2014/media/files/0256.pdf
Y. Feng, C. Zhao, L. Tong, Q. Yu, and Y. Shu, "Dynamic impact analysis of the time-delay levitation control system on maglev vehicle system after adding smith predictor," ISA transactions, vol. 154, pp. 82–94, 2024. [Online]. Available: https://doi.org/10.1016/j.isatra.2024.08.025
Q. Inc., "Magnetic levitation user manual," 2012. [Online]. Available: https://www.quanser.com/products/magnetic-levitation/
J. Apkarian, H. Lecheray, and M. Levis, "Student workbook. magnetic levitation experiment for matlab/simulink users," 2012.
E. Hendricks, O. Jannerup, and P. H. Skurensen, Linear Systems Control: deterministic and stochastic methods. Springer, 2008. [Online]. Available: https://doi.org/10.1007/978-3-540-78486-9
C.-T. Chen, Linear system theory and design. Oxford University Press, Inc., 1984.