A Multi-Objective Optimization Approach to Coverage Path Planning of Agricultural Drone
Keywords:
agricultural drones, multi- objective optimization, coverage path planning, precision agricultureAbstract
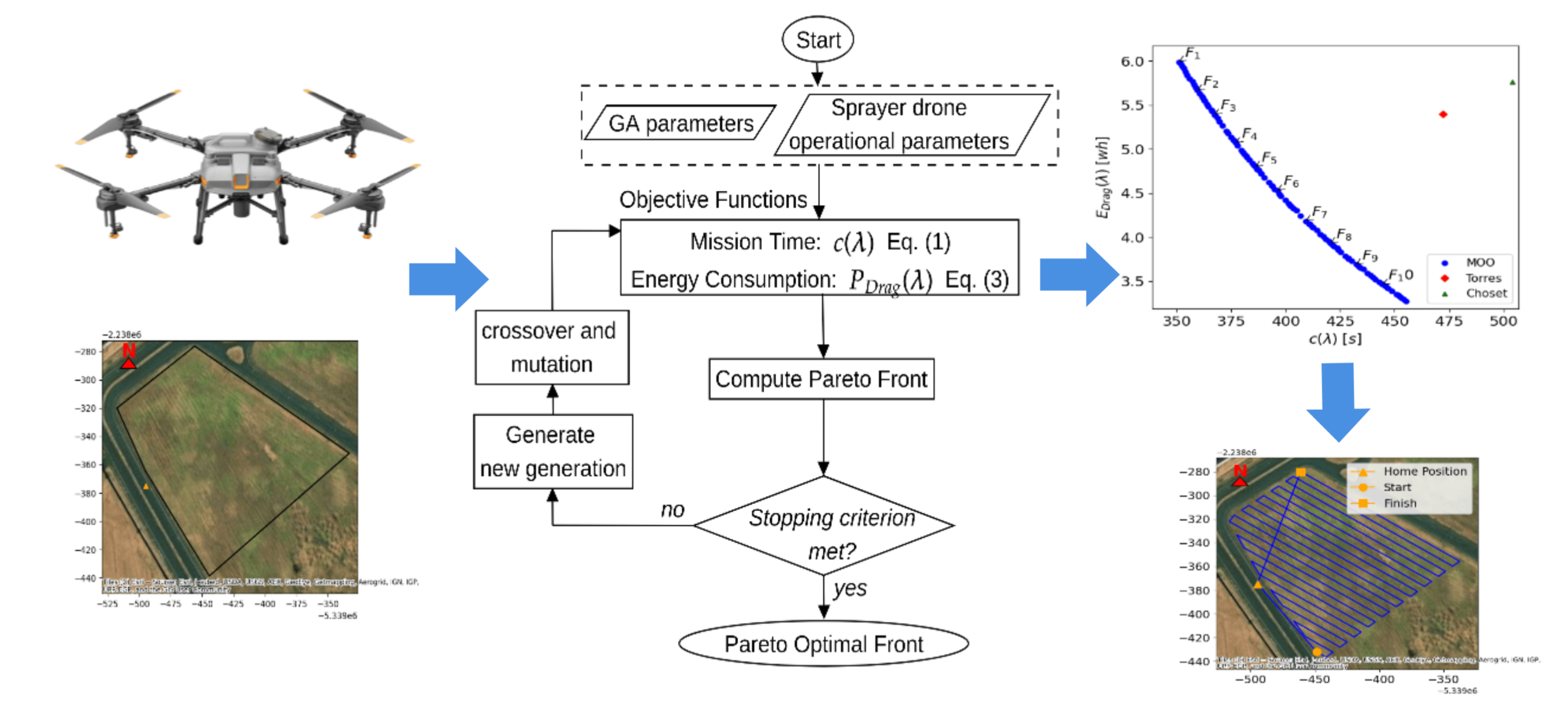
Agricultural drones have been widely used in precision agriculture operations due to their high performance and adaptability to outdoor tasks, such as spraying, mapping, and monitoring. Nevertheless, mission planning remains challenging due to the constraints imposed by operational performance under real field conditions. In this work, a novel multi-objective optimization approach for mission planning of agricultural spraying drones is proposed. This approach contemplated an off-line coverage path planning strategy that simultaneously minimizes total mission time and energy consumption. The parameters that define the coverage path are optimized while considering the operational requirements of the spraying tasks. The framework is applied to a real case study using the DJI AGRAS T10 drone in a crop field. The results obtained from the multi-objective optimization demonstrate significant performance gains in terms of reduction in battery energy consumption of up to 14.2% and a mission time decrease of 9.5% when compared to conventional geometric methods. Thus, the proposed method potentially reduces both the drag energy and the mission time. These findings highlight the potential of multi-objective optimization as a decision-support tool to improve the efficiency and sustainability of drone-based spraying operations in agriculture.
Downloads
References
S. Qazi, B. A. Khawaja, and Q. U. Farooq, “Iot-equipped and ai-
enabled next generation smart agriculture: A critical review, current
challenges and future trends,” Ieee Access, vol. 10, pp. 21 219–21 235,
, doi:10.1109/ACCESS.2022.3152544.
L. F. Oliveira, A. P. Moreira, and M. F. Silva, “Advances in agriculture
robotics: A state-of-the-art review and challenges ahead,” Robotics,
vol. 10, no. 2, p. 52, 2021, doi:10.3390/robotics10020052.
R. Guebsi, S. Mami, and K. Chokmani, “Drones in precision agriculture:
A comprehensive review of applications, technologies, and challenges,”
Drones, vol. 8, no. 11, p. 686, 2024, doi:10.3390/drones8110686.
A. Hafeez, M. A. Husain, S. Singh, A. Chauhan, M. T. Khan, N. Ku-
mar, A. Chauhan, and S. Soni, “Implementation of drone technol-
ogy for farm monitoring & pesticide spraying: A review,” Informa-
tion processing in Agriculture, vol. 10, no. 2, pp. 192–203, 2023,
doi:10.1016/j.inpa.2022.02.002.
U. R. Mogili and B. Deepak, “Review on application of drone systems
in precision agriculture,” Procedia computer science, vol. 133, pp. 502–
, 2018, doi:10.1016/j.procs.2018.07.063.
C. Di Franco and G. Buttazzo, “Coverage path planning for uavs
photogrammetry with energy and resolution constraints,” Journal of
Intelligent & Robotic Systems, vol. 83, no. 3, pp. 445–462, 2016,
doi:10.1007/s10846-016-0348-x.
F. A. Lara-Molina, “Optimization of coverage path planning for agricul-
tural drones in weed-infested fields using semantic segmentation,” Agri-
culture, vol. 15, no. 12, p. 1262, 2025, doi:10.3390/agriculture15121262.
T. M. Cabreira, L. B. Brisolara, and F. J. Paulo R, “Survey on coverage
path planning with unmanned aerial vehicles,” Drones, vol. 3, no. 1,
p. 4, 2019, doi:10.3390/drones3010004.
L. Bostelmann-Arp, C. Steup, and S. Mostaghim, “Multi-objective seed
curve optimization for coverage path planning in precision farming,” in
Proceedings of the Genetic and Evolutionary Computation Conference,
, pp. 1312–1320, doi:10.1145/3583131.3590490.
H. Tian, Z. Mo, C. Ma, J. Xiao, R. Jia, Y. Lan, and Y. Zhang,
“Design and validation of a multi-objective waypoint planning algo-
rithm for uav spraying in orchards based on improved ant colony
algorithm,” Frontiers in Plant Science, vol. 14, p. 1101828, 2023,
doi:10.3389/fpls.2023.1101828.
K. O. Ellefsen, H. A. Lepikson, and J. C. Albiez, “Planning inspection
paths through evolutionary multi-objective optimization,” in Proceedings
of the Genetic and Evolutionary Computation Conference 2016, 2016,
pp. 893–900, doi:10.1145/2908812.2908883.
L. Bostelmann-Arp, C. Steup, and S. Mostaghim, “Free-form cov-
erage path planning of quadcopter swarms for search and rescue
missions using multi-objective optimization,” in 2024 IEEE Congress
on Evolutionary Computation (CEC).
IEEE, 2024, pp. 1–8,
doi:10.1109/CEC60901.2024.10611984.
K. O. Ellefsen, H. A. Lepikson, and J. C. Albiez, “Multiobjective
coverage path planning: Enabling automated inspection of complex, real-
world structures,” Applied Soft Computing, vol. 61, pp. 264–282, 2017,
doi:10.1016/j.asoc.2017.07.051.
U. Orozco-Rosas, K. Picos, and O. Montiel, “Hybrid path planning
algorithm based on membrane pseudo-bacterial potential field for au-
tonomous mobile robots,” IEEE Access, vol. 7, pp. 156 787–156 803,
, doi:10.1109/ACCESS.2019.2949835.
U. Orozco-Rosas, O. Montiel, and R. Sepúlveda, “Mobile robot
path planning using membrane evolutionary artificial potential
field,” Applied soft computing, vol. 77, pp. 236–251, 2019,
doi:10.1016/j.asoc.2019.01.036.
U. Orozco-Rosas, K. Picos, J. J. Pantrigo, A. S. Montemayor, and
A. Cuesta-Infante, “Mobile robot path planning using a qapf learning
algorithm for known and unknown environments,” IEEE Access, vol. 10,
pp. 84 648–84 663, 2022, doi:10.1109/ACCESS.2022.3197628.
X. Xu, C. Xie, Z. Luo, C. Zhang, and T. Zhang, “A multi-objective
evolutionary algorithm based on dimension exploration and discrepancy
evolution for uav path planning problem,” Information Sciences, vol.
, p. 119977, 2024, doi:10.1016/j.ins.2023.119977.
X. Liu, L. Gao, Z. Guan, Y. Song, and R. Zhang, “A multi-objective
optimization model for planning unmanned aerial vehicle cruise route,”
International Journal of Advanced Robotic Systems, vol. 13, no. 3, p.
, 2016, doi:10.5772/64165.
X. Zhang, S. Xia, X. Li, and T. Zhang, “Multi-objective particle swarm
optimization with multi-mode collaboration based on reinforcement
learning for path planning of unmanned air vehicles,” Knowledge-Based
Systems, vol. 250, p. 109075, 2022, doi:10.1016/j.knosys.2022.109075.
V. Ajith and K. Jolly, “Hybrid optimization based multi-objective
path planning framework for unmanned aerial vehicles,” Cy-
bernetics and Systems, vol. 54, no. 8, pp. 1397–1423, 2023,
doi:10.1080/01969722.2022.2157607.
X. Zhen, Z. Enze, and C. Qingwei, “Rotary unmanned aerial vehicles
path planning in rough terrain based on multi-objective particle swarm
optimization,” Journal of Systems Engineering and Electronics, vol. 31,
no. 1, pp. 130–141, 2020, doi:10.21629/JSEE.2020.01.14.
H. Bai, T. Fan, Y. Niu, and Z. Cui, “Multi-uav cooperative trajectory
planning based on many-objective evolutionary algorithm,” Complex
System Modeling and Simulation, vol. 2, no. 2, pp. 130–141, 2022,
doi:10.23919/CSMS.2022.0006.
M. K. Singh, A. Choudhary, S. Gulia, and A. Verma, “Multi-objective
nsga-ii optimization framework for uav path planning in an uav-assisted
wsn,” The Journal of Supercomputing, vol. 79, no. 1, pp. 832–866, 2023,
doi:10.1007/s11227-022-04701-2.
Q. Zhang and H. Li, “Moea/d: A multiobjective evolutionary algorithm
based on decomposition,” IEEE Transactions on Evolutionary Computa-
tion, vol. 11, no. 6, pp. 712–731, 2007, doi:10.1109/TEVC.2007.892759.
E. Zitzler, M. Laumanns, and L. Thiele, “Spea2: Improving the strength
pareto evolutionary algorithm,” Evolutionary Methods for Design, Opti-
misation and Control with Application to Industrial Problems, pp. 95–
, 2001.
J. E. Silva, W. H. B. da Silva, M. A. J. Ferraz, E. A. S. Menezes,
O. P. da Costa, F. D. Inácio, T. O. C. Barboza, C. A. D. Melo,
G. R. Carvalho, and A. F. dos Santos, “Impact of spray volume and
flight speed on the efficiency of drone applications in coffee plants of
different ages,” Smart Agricultural Technology, vol. 9, p. 100694, 2024,
doi:10.1016/j.atech.2024.100694.
A. Thibbotuwawa, P. Nielsen, B. Zbigniew, and G. Bocewicz, “Energy
consumption in unmanned aerial vehicles: A review of energy consump-
tion models and their relation to the uav routing,” in International Con-
ference on Information Systems Architecture and Technology. Springer,
, pp. 173–184, doi:10.1007/978-3-319-99996-8 16.
V. R. Bolzon and F. A. Lara-Molina, “Optimal kinematic and elas-
todynamic design of planar parallel robot with flexible joints,” IEEE
Latin America Transactions, vol. 16, no. 5, pp. 1343–1352, 2018,
doi:10.1109/TLA.2018.8408426.
F. A. Lara-Molina, D. Dumur, and K. Assolari Takano, “Multi-objective
optimal design of flexible-joint parallel robot,” Engineering Computa-
tions, vol. 35, no. 8, pp. 2775–2801, 2018, doi:10.1108/EC-01-2018-
F. R. Moreira, F. S. Lobato, A. A. Cavalini Jr, and V. Steffen Jr, “Robust
multi-objective optimization applied to engineering systems design,”
Latin American Journal of Solids and Structures, vol. 13, no. 9, pp.
–1822, 2016, doi:10.1590/1679-78252801.
F. S. Lobato and V. Steffen Jr, Multi-objective optimization problems:
concepts and self-adaptive parameters with mathematical and engineer-
ing applications. Springer, 2017, doi:10.1007/978-3-319-58565-9.
H. Choset and P. Pignon, “Coverage path planning: The boustrophedon
cellular decomposition,” in Field and service robotics. Springer, 1998,
pp. 203–209, doi:10.1007/978-1-4471-1273-0 32.
M. Torres, D. A. Pelta, J. L. Verdegay, and J. C. Torres, “Coverage
path planning with unmanned aerial vehicles for 3d terrain reconstruc-
tion,” Expert systems with applications, vol. 55, pp. 441–451, 2016,
doi:10.1016/j.eswa.2016.02.007.
Esri, Impact Observatory, and Microsoft, “Esri 10-meter land use/land
cover (lulc) map,” https://livingatlas.arcgis.com/landcover/, 2021, ac-
cessed: August 6, 2025.