Modeling of an 18 DoF Humanoid Robot Using a Recursive Analytical Method
Keywords:
Dynamics, Euler, humanoid robot, recursive method, skew-symmetric matrixAbstract
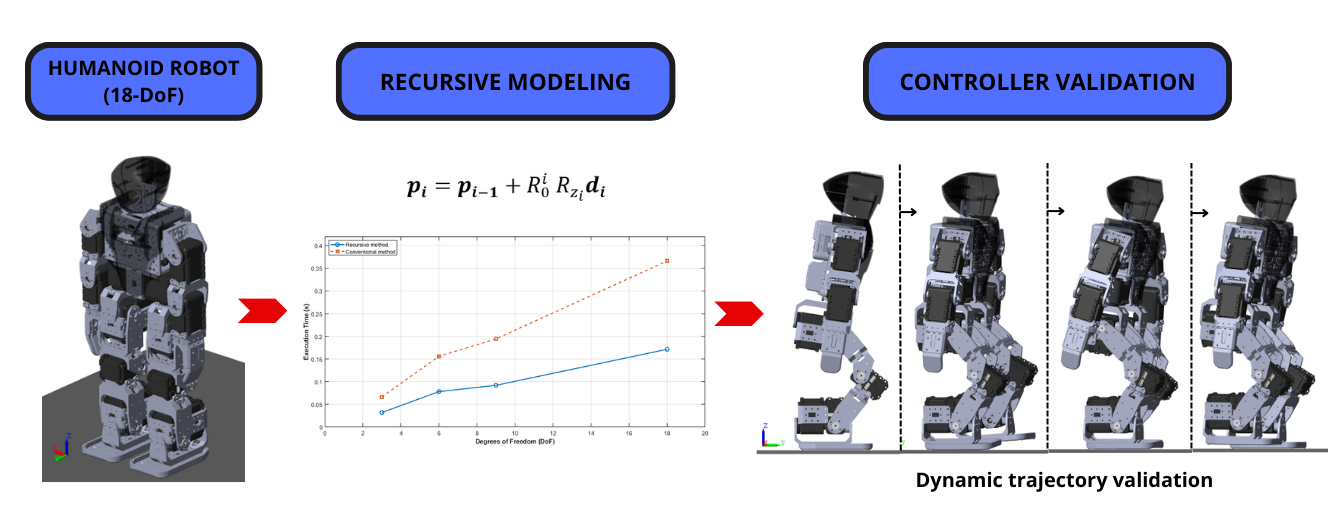
Humanoid robots have been extensively studied by the scientific community to understand and replicate human motion during specific tasks. In recent years, numerous methods and strategies have been proposed to develop mathematical models that describe humanoid dynamics. Common approaches include analytical methods, geometric modeling, and the Denavit–Hartenberg convention. In this study, we propose a recursive method based on Euler’s analytical mechanics and the use of the properties of the skew-symmetric matrix to address key modeling challenges, such as forward kinematics, differential kinematics, linear velocity, angular velocity, kinetic energy, potential energy, and the Euler–Lagrange equations of an 18 degrees of freedom (DOF) humanoid robot. A controller based on the hyperbolic tangent function is proposed to implement joint position control. Simulation results are presented using MATLAB/Simulink.
Downloads
References
X. Leng, S. Piao, L. Chang, Z. He and Z. Zhu, "Universal walking control framework of biped robot based on dynamic model and quadratic programming," Complexity, vol. 1, 2020, doi: 10.1155/2020/2789039.
D. A. Bravo M and C. F. Rengifo Rodas, "Design of a dynamic simulator for a biped robot," Modelling and Simulation in Engineering, vol. 1, 2021, doi: 10.1155/2021/5539123.
E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi and B. Morris, Feedback control of dynamic bipedal robot locomotion, CRC press, 2018, doi: 10.1201/9781420053739.
S. A. Chander, A. Mukherjee, V. D. Shivling and A. Singla, "Enhanced Euler–Lagrange Formulation for Analyzing Human Gait With Moving Base Reference," Journal of Mechanisms and Robotics, vol. 17, no. 1, 2025, doi: 10.1115/1.4065520.
R. M. Carnier and Y. Fujimoto, "Precise Optimization of Robotic Bipedal Walking Using Hamiltonian Dynamics," IEEE 29th International Symposium on Industrial Electronics (ISIE), pp. 567-572, 2020, doi: 10.1109/ISIE45063.2020.9152262.
S. Gupta and A. Kumar, "A brief review of dynamics and control of underactuated biped robots," Advanced Robotics, vol. 31, no. 12, pp. 607-623, 2017, doi: 10.1080/01691864.2017.1308270.
M. Rameez and L. A. Khan, "Modeling and dynamic analysis of the biped robot," 15th International Conference on Control, Automation and Systems (ICCAS), pp. 1149-1153, 2015, doi: 10.1109/ICCAS.2015.7364800.
J. E. Machado, H. M. Becerra and M. Moreno Rocha, "Modeling and Finite‐Time Walking Control of a Biped Robot with Feet," Mathematical Problems in Engineering, no. 1, 2015, doi: 10.1155/2015/963496.
E. Hashemi and A. Khajepour, "Kinematic and three-dimensional dynamic modeling of a biped robot," Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, vol. 231, no. 1, pp. 57-73, 2017, doi: 10.1177/1464419316645243.
A. M. Thakkar and V. J. Patel, "Dynamic Simulation of a 12 DoF Biped Robot with Newton-Euler Method using Unit Vector Approach," Procedia Computer Science, vol. 230, pp. 935-945, 2023, doi: 10.1016/j.procs.2023.12.133.
F. Gonçalves, T. Ribeiro, A. F. Ribeiro, G. Lopes and P. Flores, "Dynamic modeling of a human-inspired robot based on a Newton-Euler approach," in ROMANSY 24 - Robot Design, Dynamics and Control, CISM International Centre for Mechanical Sciences, vol 606. Springer, Cham., 2022, pp. 79-90, doi: 10.1007/978-3-031-06409-8_8.
H. F. Al-Shuka, B. Corves and W. H. Zhu, "Dynamic modeling of biped robot using Lagrangian and recursive Newton-Euler formulations," International Journal of Computer Applications, vol. 101, no. 3, pp. 1-8, 2014, doi: 10.5120/17664-8485.
X. Bajrami, A. Dermaku, A. Shala and R. Likaj, "Kinematics and dynamics modelling of the biped robot," IFAC Proceedings, vol. 46, no. 8, pp. 69-73, 2013, doi: 10.3182/20130606-3-XK-4037.00032.
X. Li, H. Imanishi, M. Minami, T. Matsuno and A. Yanou, "Dynamical model of walking transition considering nonlinear friction with floor," Journal of Advanced Computational Intelligence and Intelligent Informatics, vol. 20, no. 6, pp. 974-982, 2016, doi: 10.20965/jaciii.2016.p0974.
S. Kajita, M. Benallegue, R. Cisneros, T. Sakaguchi, S. I. Nakaoka, M. Morisawa and F. Kanehiro, "Biped gait control based on spatially quantized dynamics," 18th International Conference on Humanoid Robots, 2018, doi: 10.1109/HUMANOIDS.2018.8624942.
J. &. P. J. H. Cho, "Model predictive control of running biped robot," Applied Sciences, vol. 12, no. 21, 2022, doi: 10.3390/app122111183.
G. Reyes, J. A. Pamanes, J. E. Fierro and V. Nunez, "Optimum Walking of the Bioloid Humanoid Robot on a Rectilinear Path," In Computational Kinematics. Springer, Cham, pp. 143-151, 2018, doi: 10.1007/978-3-319-60867-9_17.
D. Kim, S. J. Jorgensen, J. Lee, J. Ahn, J. Luo and L. Sentis, "Dynamic locomotion for passive-ankle biped robots and humanoids using whole-body locomotion control," The International Journal of Robotics Research, vol. 39, no. 8, pp. 936-956, 2020, doi: 10.1177/02783649209180.
S. Kolathaya, "Local stability of PD controlled bipedal walking robots," Automatica, vol. 114, 2020, doi: 10.1016/j.automatica.2020.108841.
D. I. H. Putri and C. Machbub, "Gait controllers on humanoid robot using kalman filter and PD controller," In 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), pp. 36-41, 2018, doi: 10.1109/ICARCV.2018.8581061.
J. R. Guadarrama-Olvera, S. Kajita, F. Kanehiro and G. Cheng, "Contact Stability Control of Stepping Over Partial Footholds Using Plantar Tactile Feedback," International Conference on Intelligent Robots and Systems, 2024, doi: 10.1109/IROS58592.2024.10802686.
K. Kaneko, F. Kanehiro, M. Morisawa, K. Miura, S. I. Nakaoka and S. Kajita, "Cybernetic human HRP-4C," International Conference on Humanoid Robots, pp. 7-14, 2009, doi: 10.1109/ICHR.2009.5379537.
Z. Li, X. Cheng, X. B. Peng, P. Abbeel, S. Levine, G. Berseth and K. Sreenath, "Reinforcement learning for robust parameterized locomotion control of bipedal robots," In 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, doi: 10.1109/ICRA48506.2021.9560769.
G. Gupta and A. Dutta, "Trajectory generation and step planning of a 12 DoF biped robot on uneven surface," Robotica, vol. 36, no. 7, pp. 945-970, 2018, doi: 10.1017/S0263574718000188.
A. Sarkar and A. Dutta, "Optimal trajectory generation and design of an 8-dof compliant biped robot for walk on inclined ground," Journal of Intelligent & Robotic Systems, vol. 94, no. 3, pp. 583-602, 2019, doi: 10.1007/s10846-018-0882-9.
D. Hein, M. Hild and R. Berger, "Evolution of biped walking using neural oscillators and physical simulation," In Robot Soccer World Cup, pp. 433-440, 2007, doi: 10.1007/978-3-540-68847-1_45.
A. A. Saputra, J. Botzheim, I. A. Sulistijono and N. Kubota, "Biologically inspired control system for 3-D locomotion of a humanoid biped robot," IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 46, no. 7, pp. 898-911, 2015, doi: 10.1109/TSMC.2015.2497250.
D. I. H. Putri and C. Machbub, "Maintaining Trajectory of CoM for Stable Locomotion of Humanoid Robot Using Kalman Filter and Fuzzy Logic Controller," In 2019 IEEE International Conference on Signals and Systems (ICSigSys), pp. 97-102, 2019, doi: 10.1109/ICSIGSYS.2019.8811090.
J. R. Cerritos-Jasso, K. A. Camarillo-Gómez, J. A. Monsiváis-Medina, G. Castillo-Alfaro, G. I. Pérez-Soto and J. A. Pámanes-García, "Kinematic Modeling of a Humanoid Soccer–Player: Applied to BIOLOID Premium Type A Robot.," in In FIRA RoboWorld Congress, Berlin, Heidelberg, Springer Berlin Heidelberg, 2013, pp. 49-63, doi: 10.1007/978-3-642-40409-2_5.
J. Tacué, C. Rengifo and D. Bravo, "An experimental energy consumption comparison between trajectories generated by using the cart-table model and an optimization approach for the Bioloid robot," International Journal of Advanced Robotic Systems, vol. 17, no. 2, 202, doi: 10.1177/1729881420917808.
A. B. Krishnan, S. Aswath and G. Udupa, "Real Time Vision Based Soccer Playing Humanoid Robotic Platform," In Proceedings of the 2014 International Conference on Interdisciplinary Advances in Applied Computing, pp. 1-8, 2014, doi: 10.1145/2660859.2660966.
Y. L. Hwang, C. H. Chen, S. J. Hwang and N. Xuan Mai, "The dynamic analysis of humanoid robot system," Applied Mechanics and Materials, vol. 373, pp. 242-245, 2013, doi: 10.1007/978-3-030-01054-6_60.
J. V. Nunez, A. Briseno, D. A. Rodriguez, J. M. Ibarra and V. M. Rodriguez, "Explicit analytic solution for inverse kinematics of bioloid humanoid robot," In 2012 Brazilian Robotics Symposium and Latin American Robotics Symposium, pp. 33-38, 2012, doi: 10.1109/SBR-LARS.2012.62.
F. Gonçalves, T. Ribeiro, A. F. Ribeiro, G. Lopes and P. Flores, "A Recursive Algorithm for the Forward Kinematic Analysis of Robotic Systems Using Euler Angles," Robotics, p. 20, 2022, doi: 10.3390/robotics11010015.
B. Siciliano, L. Sciavicco, L. Villani and G. Oriolo, “Robotics: Modelling, Planning and Control”, Springer, 2009, pp. 56-109, doi: 10.1007/978-1-84628-642-1.
R. N. Jazar, “Theory of applied robotics”, Springer, 2010, pp. 71-149, doi: 10.1007/978-1-4419-1750-8.
F. R. Cortés, “Robótica: control de robots manipuladores”. Alpha Editorial, 2011, pp. 378-400.