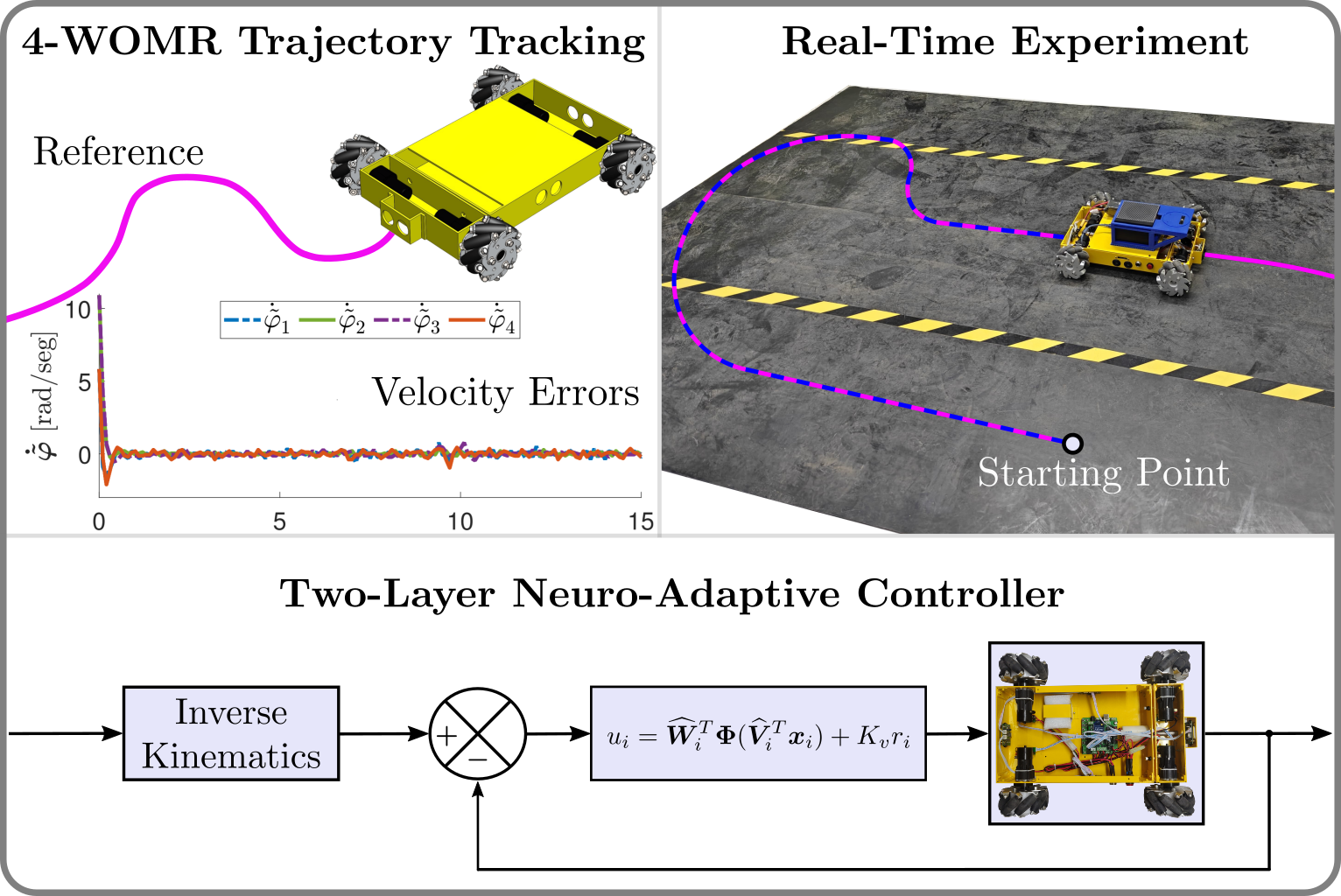
Two-Layer Neuro-Adaptive Compensation Control Applied to a 4-Wheeled Omnidirectional Mobile Robot
Keywords:
Neuro-adaptive control, Tracking control, Online weight update, Omnidirectional mobile robot, Mecanum wheelsAbstract
Thanks to recent advances in artificial intelligence, interest in autonomous mobile systems has increased, and consequently, the development and validation of advanced control schemes for them has also seen a rise. This work introduces a two-layer neuro-adaptive compensation control scheme designed to address the trajectory tracking problem for an omnidirectional wheeled mobile robot equipped with four independent Mecanum wheels. The two-layer artificial neural network is used to compensate for the unknown dynamics of the mobile robot; the filtered error technique is used to obtain the weights of the artificial neural network. This approach does not require offline training. A key contribution of this approach is the integration of a novel auxiliary signal to provide robustness, particularly in non-ideal scenarios. This robust term effectively bounds the disturbance commonly encountered in such control approaches. A significant advantage of this approach is its independence from precise knowledge of plant parameters or the overall plant dynamics. Experimental results demonstrate the effectiveness of the proposed controller in achieving desired performance for the 4-wheeled omnidirectional mobile robot.
Downloads
References
Y. Han, G. Huang, S. Song, L. Yang, H. Wang, and Y. Wang, “Dynamic neural networks: A survey,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 44, no. 11, pp. 7436–7456, 2022. DOI: 10.1109/TPAMI.2021.3117837.
F. L. Lewis, A. Yesildirak, and S. Jagannathan, Neural Network Control of Robot Manipulators and Nonlinear Systems. Bristol, PA, USA: Taylor & Francis, Inc., 1998.
J. Farrell and M. Polycarpou, Adaptive Approximation Based Control: Unifying Neural, Fuzzy and Traditional Adaptive Approximation Approaches. Adaptive and Cognitive Dynamic Systems: Signal Pro cessing, Learning, Communications and Control, Wiley, 2006. DOI: 10.1002/0471781819.
Z. Hendzel et al., “Modelling of dynamics of a wheeled mobile robot with mecanum wheels with the use of Lagrange equations of the second kind,” International Journal of Applied Mechanics and Engineering, vol. 22, no. 1, pp. 81–99, 2017. DOI: 10.1515/ijame-2017-0005.
F. Lewis, “Nonlinear network structures for feedback control,” Asian
Journal of Control, vol. 1, no. 4, pp. 205–228, 1999. DOI: 10.1111/j.1934-6093.1999.tb00021.x.
H. Wang, Y. Yang, J. Fei, and Y. Fang, “Adaptive control of micro-electro-mechanical system gyroscope using neural network compensator,” Advances in Mechanical Engineering, vol. 11, no. 12, p. 1687814019898325, 2019. DOI: 10.1177/1687814019898325.
F. Luan, J. Na, Y. Huang, and G. Gao, “Adaptive neural network control for robotic manipulators with guaranteed finite-time convergence,” Neurocomputing, vol. 337, pp. 153 – 164, 2019. DOI: 10.1016/j.neucom.2019.01.063.
Y. Wu, R. Huang, X. Li, and S. Liu, “Adaptive neural network control of uncertain robotic manipulators with external disturbance and timevarying output constraints,” Neurocomputing, vol. 323, pp. 108 – 116, 2019. DOI: 10.1016/j.neucom.2018.09.072.
F. Baghbani, M.-R. Akbarzadeh-T, M.-B. Naghibi-Sistani, and A. Akbarzadeh, “Emotional neural networks with universal approximation property for stable direct adaptive nonlinear control systems,” Engineering Applications of Artificial Intelligence, vol. 89, p. 103447, 2020. DOI: 10.1016/j.engappai.2019.103447.
X. Wang, X. Li, Q. Wu, and X. Yin, “Neural network based adaptive dynamic surface control of nonaffine nonlinear systems with time delay and input hysteresis nonlinearities,” Neurocomputing, vol. 333, pp. 53 63, 2019. DOI: 10.1016/j.neucom.2018.12.058.
V. T. Yen, W. Y. Nan, and P. Van Cuong, “Recurrent fuzzy wavelet neural networks based on robust adaptive sliding mode control for industrial robot manipulators,” Neural Computing and Applications, vol. 31, no. 11, pp. 6945–6958, 2019. DOI: 10.1007/s00521-018-3520-3.
J. Moreno–Valenzuela, J. Montoya–Chairez, and V. Santibanez, “Robust trajectory tracking control of an underactuated control moment gyroscope via neural network–based feedback linearization,” Neurocomputing, vol. 403, pp. 314 – 324, 2020. DOI: 10.1016/j.neucom.2020.04.019.
D. Xu, D. Zhao, J. Yi, and X. Tan, “Trajectory tracking control of omnidirectional wheeled mobile manipulators: robust neural networkbased sliding mode approach,” IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), vol. 39, no. 3, pp. 788–799, 2009. DOI: 10.1109/TSMCB.2008.2009464.
X. Lu, X. Zhang, G. Zhang, J. Fan, and S. Jia, “Neural network adaptive sliding mode control for omnidirectional vehicle with uncertainties,” ISA transactions, vol. 86, pp. 201–214, 2019. DOI: 10.1016/j.isatra.2018.10.043.
T. Zhao, P. Qin, and Y. Zhong, “Trajectory tracking control method for omnidirectional mobile robot based on self-organizing fuzzy neural network and preview strategy,” Entropy, vol. 25, no. 2, 2023. DOI: 10.3390/e25020248.
P. Qin, T. Zhao, N. Liu, Z. Mei, and W. Yan, “Predefined-time fuzzy neural network control for omnidirectional mobile robot,” Processes, vol. 11, no. 1, 2023. DOI: 10.3390/pr11010023.
G. Campion, G. Bastin, and B. Dandrea-Novel, “Structural properties and classification of kinematic and dynamic models of wheeled mobile robots,” IEEE Transactions on Robotics and Automation, vol. 12, pp. 4762, Feb 1996. DOI: 10.1109/70.481750.
R. Kelly and V. Santibanez, Control de movimiento de robots manipuladores. Automatica y Robotica, Pearson Educacion, 2003.
S. Haykin, Neural Networks: A Comprehensive Foundation. International edition, Prentice Hall, 1999.
H. Khalil, Nonlinear Systems. Prentice Hall, 2002.
S. Lopez, M. Llama, R. Garcia-Hernandez, and V. Santibanez, “Pd with neuro-adaptive compensation control using the signed power function,” International Journal of Control, vol. 96, no. 6, pp. 1638–1649, 2022. DOI: 10.1080/00207179.2022.2062452.