UAV Flight Comparison Using Backstepping: On-board Data and Observers
Keywords:
Unmanned Aerial Vehicles, Backstepping Control, State Observer, Trajectory Tracking, AR.Drone 2.0Abstract
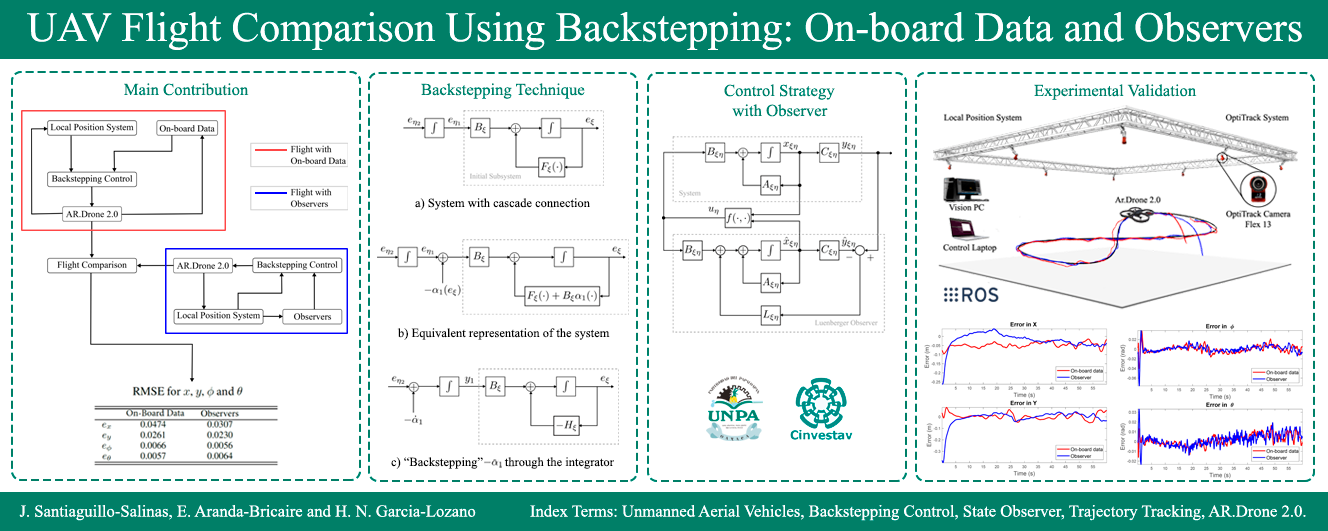
This paper presents the comparison of performance in flight trajectory tracking for a commercial UAV AR.Drone 2.0, using state observers and on board data. This work seeks to establish that state observers are an alternative to close the control loop in this type of applications. The control strategy proposed for the flight is designed using the Backstepping technique. For the implementation of the control law, knowledge of the position and orientation of the UAV is assumed, therefore, its longitudinal and rotational velocities are estimated either by using observers or data from the combination of inertial and visual measurement of the on-board sensors. In both cases, the designed control strategy makes the UAV converge to the preestablished flight trajectory. However, an analysis of the mean square error between the UAV trajectory with respect to the desired trajectory, gives as a result that, in three of the four compared states, the error obtained with the observer is lower. The theoretical results presented are validated experimentally.
Downloads
References
H. González-Jorge, J. Martínez-Sánchez, M. Bueno, and P. Arias, “Unmanned aerial systems for civil applications: A review,” Drones, vol. 1, p. 2, jul 2017. DOI: https://doi.org/10.3390/drones1010002.
D. Mellinger, N. Michael, and V. Kumar, “Trajectory generation and control for precise aggressive manuevers with quadrotors,” International Journal of Robotics Research, 2012. DOI: https://doi.org/10.1177/0278364911434236.
M. Blondsch, S. Weiss, D. Scaramuzza, and R. Siegwart, “Vision based mav navigation in unknown and unstructured environments,” 2010 IEEE International Conference on Robotics and Automation (ICRA), pp. 21–28, 2010. DOI: https://doi.org/10.1109/ROBOT.2010.5509920.
N. Michael, J. Fink, and V. Kumar, “Cooperative manipulation and transportation with aerial robots,” Autonomous Robots, vol. 30, pp. 73–86, 2010. DOI: https://doi.org/10.1007/s10514-010-9205-0.
S. N. Ghazbi, Y. Aghli, M. Alimohammadi, and A. A. Akbari, “Quadrotors unmanned aerial vehicles: A review,” International Journal on Smart Sensing and Intelligent Systems, vol. 9, pp. 309–333, jan 2016. DOI: https://doi.org/10.21307/ijssis-2017-872.
P. Falcón, A. Barreiro, and M. D. Cacho, “Modeling of parrot ardrone and passivity-based reset control,” 2013 9th Asian Control Conference (ASCC), pp. 1–6, 2013. DOI: https://doi.org/10.1109/ASCC.2013.6606362.
A. Hernandez, C. Copot, R. De keyser, T. Vlas, and I. Nascu, “Identification and path following control of an ar.drone quadrotor,” 2013 17th International Conference on System Theory, Control and Computing (ICSTCC), pp. 583–588, 2013. DOI: https://doi.org/10.1109/ICSTCC.2013.6689022.
R. M. Criado and F. R. Rubio, “Autonomous path tracking control design for a comercial quadcopter,” IFAC-PapersOnLine, vol. 48, no. 9, pp. 73–78, 2015. DOI: https://doi.org/10.1016/j.ifacol.2015.08.062.
R. Cajo, C. Copot, C. M. Ionescu, R. De Keyser, and D. Plaza, “Fractional order pd path-following control of an ar. drone quadrotor,” 2018 IEEE 12th International Symposium on Applied Computational Intelligence and Informatics (SACI), pp. 291–296, 2018. DOI: https://doi.org/10.1109/SACI.2018.8440944.
T. Zhao and H. Jiang, “Landing system for ar.drone 2.0 using onboard camera and ros,” 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), pp. 1098–1102, 2016. DOI: https://doi.org/10.1109/CGNCC.2016.7828941.
V. Babu, K. Das, and S. Kumar, “Designing of self tuning pid controller for ar drone quadrotor,” 18th International Conference on Advanced Robotics (ICAR), pp. 167–172, 2017. DOI: https://doi.org/10.1109/ICAR.2017.8023513.
A. Prayitno, V. Indrawati, and I. I. Trusulaw, “Fuzzy gain scheduling pid control for position of the ar.drone,” International Journal of Electrical and Computer Engineering (IJECE), vol. 8, no. 4, pp. 1939–1946, 2018. DOI: https://doi.org/10.11591/ijece.v8i4.pp1939-1946.
A. Merheb, H. Noura, and F. Bateman, “Emergency control of ar drone quadrotor uav suffering a total loss of one rotor,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 2, pp. 961–971, 2017. DOI: https://doi.org/10.1109/TMECH.2017.2652399.
P. J. Bristeau, F. Callou, D. Vissiére, and N. Petit, “The navigation and control technology inside the ar.drone micro uav,” 18th IFAC World Congress, 2011. DOI: https://doi.org/10.3182/20110828-6-IT-1002.02327.
A. Mokhtari, N. K. M’Sirdi, K. Meghriche, and K. Belaidi, “Feedback linearization and linear observer for a quadrotor unmanned aerial vehicle,” Advanced Robotics, vol. 20, no. 1, pp. 71–91, 2012. DOI: https://doi.org/10.1163/156855306775275495.
X. Wang and B. Shirinzadeh, “Nonlinear augmented observer design and application to quadrotor aircraft,” Nonlinear Dynamics, vol. 80, no. 3, pp. 1463–1481, 2015. DOI: https://doi.org/10.1007/s11071-015-1955-y.
L. Vago-Santana, A. Santos-Brandão, M. Sarcinelli-Filho, and R. Carelli, “A trajectory tracking and 3d positioning control for the ar.drone quadrotor,” 2014 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 756–767, 2014. DOI: https://doi.org/10.1109/ICUAS.2014.6842321.
M. F. Sani and G. Karimian, “Automatic navigation and landing of an indoor ar. drone quadrotor using aruco marker and inertial sensors,” 2017 International Conference on Computer and Drone Applications (IConDA), pp. 102–107, 2017. DOI: https://doi.org/10.1109/ICONDA.2017.8270408.
S. Ponte, G. Ariante, U. Papa, and G. D. Core, “An embedded platform for positioning and obstacle detection for small unmanned aerial vehicles,” Electronics, vol. 9, p. 1175, jul 2020. DOI: https://doi.org/10.3390/electronics9071175.
M. Kazim, A. T. Azar, A. Koubaa, and A. Zaidi, “Disturbance-rejectionbased optimized robust adaptive controllers for uavs,” IEEE Systems Journal, vol. 15, pp. 3097–3108, June 2021. DOI: https://doi.org/10.1109/jsyst.2020.3006059.
J. Montoya-Morales, M. Guerrero-Sánchez, G. Valencia-Palomo, O. Hernández-González, F. López-Estrada, and J. Hoyo-Montaño, “Realtime robust tracking control for a quadrotor using monocular vision,” Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, vol. 237, pp. 2729–2741, Feb. 2023. DOI: https://doi.org/10.1177/09544100231158265.
O. Hernández-González, M.-E. Guerrero-Sánchez, M. Farza, T. Ménard, M. M’Saad, and R. Lozano, “High gain observer for a class of nonlinear systems with coupled structure and sampled output measurements: application to a quadrotor,” International Journal of Systems Science, vol. 50, pp. 1089–1105, Mar. 2019. DOI: https://doi.org/10.1080/00207721.2019.1589596.
M.-E. Guerrero-Sanchez, O. Hernandez-Gonzalez, G. Valencia-Palomo, F.-R. Lopez-Estrada, A.-E. Rodriguez-Mata, and J. Garrido, “Filtered observer-based ida-pbc control for trajectory tracking of a quadrotor,” IEEE Access, vol. 9, pp. 114821–114835, 2021. DOI: https://doi.org/10.1109/access.2021.3104798.
J. Xiao, “Trajectory planning of quadrotor using sliding mode control with extended state observer,” Measurement and Control, vol. 53, pp. 1300–1308, June 2020. DOI: https://doi.org/10.1177/0020294020927419.
K. P. Valavanis and G. J. Vachtsevanos, eds., Handbook of Unmanned Aerial Vehicles. Springer Netherlands, 2015. DOI: https://doi.org/10.1007/978-90-481-9707-1.
L. R. García-Carrillo, A. E. Dzul-López, R. Lozano, and C. Pégard, “Modeling the quad-rotor mini-rotorcraft,” in Quad Rotorcraft Control, Advances in Industrial Control, ch. 2, pp. 23–34, Springer London, 2013. DOI: https://doi.org/10.1007/978-1-4471-4399-4_2.
P. Castillo, R. Lozano, and A. E. Dzul, “The quad-rotor rotorcraft,” in Modelling and Control of Mini-Flying Machines, Advances in Industrial Control, ch. 3, Springer London, 2005. DOI: https://doi.org/10.1007/1-84628-179-2_3.
P. V. Kokotovic, “The joy of feedback: nonlinear and adaptive,” IEEE Control Systems Magazine, vol. 12, no. 3, pp. 7–17, 1992. DOI: https://doi.org/10.1109/37.165507.
D. Luenberger, “An introduction to observers,” IEEE Transactions on Automatic Control, pp. 751–752, 1971. DOI: https://doi.org/10.1109/TAC.1971.1099826.
S. Choi, S. Huh, S. Lee, H. Kim, S. Woo and S. Ahn, “Drone wireless charging station using multiple transmitter coils of different sizes with degrees of freedom in the air gap,” 2021 24th International Conference on Electrical Machines and Systems (ICEMS), pp. 722–726, 2021. DOI: https://doi.org/10.23919/icems52562.2021.9634472.