Nonlinear trajectory tracking with a 6DOF AUV using an MRAFC controller
Keywords:
MRAFC, AUV, Lyapunov, Takagy-Sugeno, 6- DOFAbstract
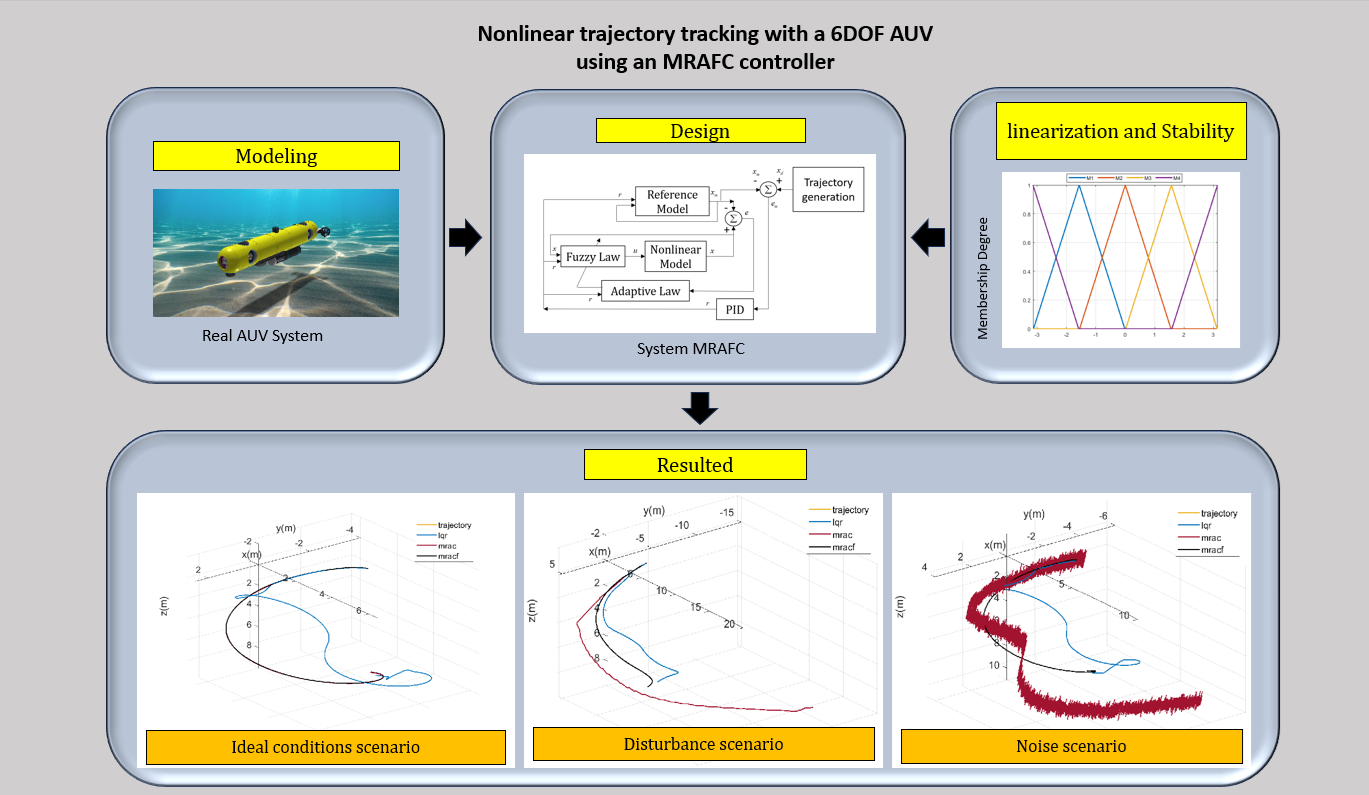
New technologies such as AUVs are used for marine exploration, considered a widespread solution in ocean monitoring, whose conventional controllers such as PID or LQR present inaccuracy in the path traversal and instability when faced with disturbances. Such that, in order to achieve sufficient precision in the path traversal and to be able to measure seabed parameters, the design of a Reference Model Adaptive Fuzzy Controller (MRAFC) is proposed. Which is a control strategy based on a combination of fuzzy systems theories using the Takagy- Sugeno model and adaptive control laws, respecting Lyapunov’s nonlinear control theories to generate a robust control against inherent disturbances of the environment. Thus, the results obtained when comparing the MRAFC controller versus LQR and MRAC test controllers show better performance in different scenarios. Where the first scenario is ideal conditions, whose result is similar when the AUV is close to the origin and unstable in the LQR controller when it moves away from the design convergence point. A second scenario is considered the disturbances, obtaining unstable behaviors from the moment of the disturbance in the LQR and MRAC controllers, observing overstresses in the control variable causing chattering effect. While the last scenario is dedicated to recreate an environment with noise affecting the reading of the vehicle variables where only the MRAFC control law is able to compensate and control in a hostile environment. Therefore, based on the results of this research it is possible to identify the MRAFC controller as suitable for AUV where precision and stability are necessary.
Downloads
References
BBC N.M.“https://www.bbc.com/mundo/articles/c16epene12jo”. 2023.
G´alvez, A, “Conservaci´on del oc´eano y las ´areas marinas protegidas del Per´u: alcances, legislaci´on y retos. Lima: Sociedad Peruana de Derecho Ambiental.,”SPDA,2022.
Neil D. Burgess and Hilary Allison and Yara Shennan-Farp´on and Ellen Shepherd. “El estado de la biodiversidad en America latina y el Caribe”. United Nations Environment Programme (UNEP). 2016.
Kingshuk Mondal, Tanumoy Banerjee, Aniruddha Panja.“ Autonomous Underwater Vehicles: Recent Developments and Future Prospects’. International Journal for Research in Applied Science and Engineering Technology (IJRASET). 2019.
Mario Balcazar, Gustavo P´erez-Zu˜niga and Francisco Cuellar. “Design and Simulation of a Model Predictive Control System Navigation of a Drone in Confined Spaces”, International Conference on Artificial Intelligence, Computer, Data Sciences and Applications (ACDSA). 2024.
Franco Hidalgo and Jose Mendoza and Francisco Cu´ellar. “ROV-based acquisition system for water quality measuring”. OCEANS 2015 - MTS/IEEE Washington. 2015.
Gianluca Antonelli, “Underwater Robots”, Springer Tracts in Advanced Robotics, Vol. 96, 2014.
Lugui Fenco,Gustavo P´erez-Zu˜niga, Diego Quiroz and Francisco Cuellar, “Model Reference Adaptive Fuzzy Controller of a 6DOF Autonomous Underwater Vehicle”, IEEE-OCEANS 2021: San Diego-Porto
Pham Van Tuan, “Maneuvering Algorithms of a Small-sized Underwater Robot,” IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), IEEE, 2020.
Joan Igual Ba˜n´o.“ Dise˜no e implementaci´on de un algoritmo de control avanzado para la estabilizaci´on de un quadrotor basado en el autopiloto pixhawk y un sistema de posicionamiento rtk - gps.”. Universitat Polit`ecnica de Val`encia. 2018.
Linkan Priyadarsini, Dr. Shubhasri Kundu, Dr. Manoj Kumar Moharana.“ Motion Control of AUV using IMC-PID Controller”. International Journal of Advanced Trends in Computer Science and Engineering. 2020.
Jasmin Velagic, Nedim Osmic, Vedin Klovo and Halil Lacevi.“Design of LQR Controller for 3D Trajectory Tracking of Octocopter Unmanned Aerial Vehicle”. International Conference on Control, Decision and Information Technologies (CoDIT). 2022.
Hubert Ventura–Hinostroza and Arturo Rojas–Moreno. “Real–Time Model Reference Adaptive Control of a 3DOF Robot Arm”, IEEE XXVI International Conference on Electronics, Electrical Engineering
and Computing,2019.
Narayan Nayak, Pranati Das and Soumya Ranjan Das, “Heading plane Control of an Autonomous Underwater Vehicle: A novel Fuzzy and Model Reference Adaptive Control Approach,” Third International Conference on Advances in Electronics, Computers and Communications (ICAECC),2020.
Zhi Liu, Xinliang Wang, Xiawei Guan, Zhesong Ma, Pingpeng Tang, Chao Zheng, “Precise Docking Control of AUV Based on Neural Network Adaptive Controller ,”IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS),2018.
Alex Huaman Loayza and Gustavo P´erez Zu˜niga. “Design of a fuzzy sliding mode controller for the autonomous path-following of a quadrotor”. IEEE Latin America Transactions. 2019.pp.962-971.
Wei Zhang, Wenhua Wu, Zixuan Li, Xue Du and Zheping Yan.“ Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control”. Journal of Marine Science and Engineering. 2023.
Y. Valeriano, A. Fern´andez, L. Hern´andez and P. J. Prieto, “Yaw Controller in Sliding Mode for Underwater Autonomous Vehicle,”IEEE LATIN AMERICA TRANSACTIONS, 2016.
Jianya Yuan, Hongjian Wang, Honghan Zhang, Changjian Lin, Dan Yu and Chengfeng Li. “AUV Obstacle Avoidance Planning Based on Deep Reinforcement Learning,”. Journal of Marine Science and Engineering. 2021.
Thor I. Fossen, Handbook of marine craft hydrodynamics and motion control, First Edition, John Wiley and Sons Ltd. Published, 2011.
Manhar R. Dhanak and Nikolaos I. Xiros. “Ocean Engineering,”. Springer Handbook. 2016.
Avilash Sahoo, Santosha K. Dwivedy and P. S. Robi, “Adaptive Fuzzy PID Controller for A Compact Autonomous Underwater Vehicle,”Global Oceans,2020.
Xin-Yu Liu, Yi-Ping Li, Shu-Xue Yan, Xi-Sheng Feng, “Adaptive attitude controller design of autonomous underwater vehicle focus on decoupling,” IEEE Underwater Technology (UT),2017.
Guanyu Lai, Yun Zhang, Zhi Liu, Junwei Wang and C. L. Philip Chen, “Direct Adaptive Fuzzy Control Scheme With Guaranteed Tracking Performances For Uncertain Canonical Nonlinear Systems,”IEEE Transactions on Fuzzy Systems, vol. 30, pp. 818–829, 2022.
Kaixin Lu, Zhi Liu, C.L.Philip Chen, Yaonan Wang and Yun Zhang, “Inverse Optimal Design of Direct Adaptive Fuzzy Controllers for Uncertain Nonlinear Systems,” IEEE Transactions on Fuzzy Systems, vol.
, pp. 1669–1682, 2022.