Trajectory control based on On/Off, Fuzzy Logic and Convolutional Neural Networks for an Industrial Robot Arm: an experimental comparison
Keywords:
industrial robotic arm, line following, trajectory control, fuzzy logic, convolutional neural networkAbstract
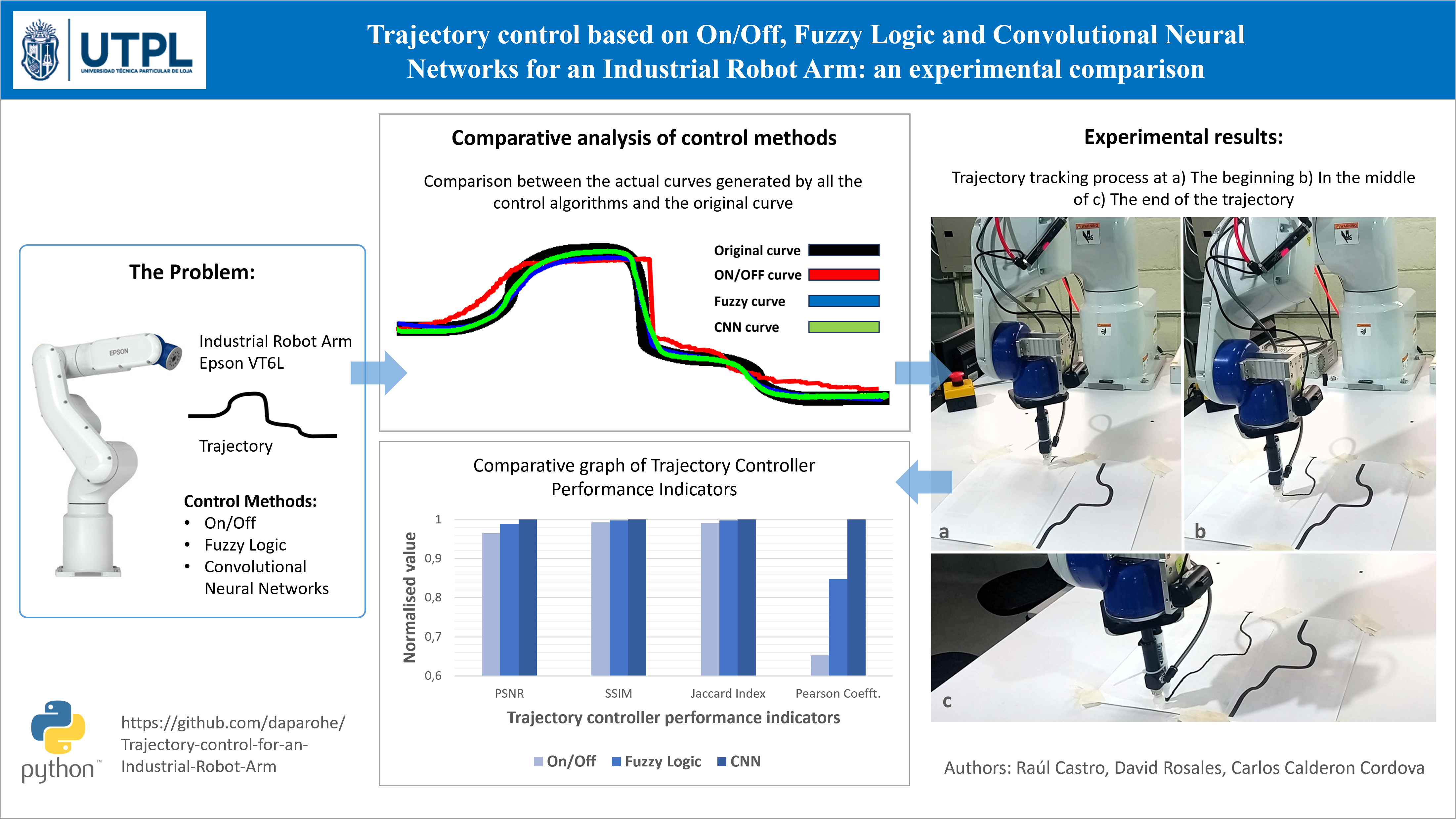
The objective of the present study is to compare three control approaches: ON/OFF control, fuzzy logic, and convolutional neural networks (CNN) implemented in Python for controlling the real-time trajectory tracking of a six-axis industrial robotic arm. This analysis has significant applications in fields that require a high level of precision, such as automated welding and surgical interventions in the medical domain. To evaluate the performance and adaptability of the control models, we will analyze the results using metrics such as Mean Squared Error (MSE), Mean Absolute Error (MAE), Root Mean Squared Error (RMSE), as well as metrics including Peak Signal-to-Noise Ratio (PSNR), Structural Similarity Index (SSIM), Jaccard Index, and Pearson's correlation coefficient. The results obtained reveal valuable information about the advantages and limitations of each control approach, highlighting the effectiveness of CNNs in visual perception and trajectory tracking. The ability of CNNs to interpret visual complexities is presented as a key factor for their success in industrial robotics and automation applications, suggesting a promising future for these technologies in dynamic environments.
Downloads
References
B. Singh and J. Sharma, “A review on distributed generation planning,” Renew. Sustain. Energy Rev., vol. 76, pp. 529–544, Sep. 2017, doi: 10.1016/J.RSER.2017.03.034.
N. Sadati and R. Ghadami, “Adaptive multi-model sliding mode control of robotic manipulators using soft computing,” Neurocomputing, vol. 71, no. 13–15, pp. 2702–2710, Aug. 2008, doi: 10.1016/j.neucom.2007.06.019.
H. Wang, “Adaptive Control of Robot Manipulators With Uncertain Kinematics and Dynamics,” IEEE Trans. Automat. Contr., vol. 62, no. 2, pp. 948–954, Feb. 2017, doi: 10.1109/TAC.2016.2575827.
A. Ashagrie, A. O. Salau, and T. Weldcherkos, “Modeling and control of a 3-DOF articulated robotic manipulator using self-tuning fuzzy sliding mode controller,” Cogent Eng., vol. 8, no. 1, Jan. 2021, doi: 10.1080/23311916.2021.1950105.
R. Kumar, S. Srivastava, and J. R. . Gupta, “Modeling and control of one-link robotic manipulator using neural network based PID controller,” in 2016 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Sep. 2016, pp. 243–249, doi: 10.1109/ICACCI.2016.7732054.
Z. Cheng and Z. Zhuo, “Adaptive Iterative Learning Trajectory Tracking Control of SCARA Robot,” in 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Jun. 2021, pp. 910–914, doi: 10.1109/IMCEC51613.2021.9482360.
J. Liang, “Research on Industrial Robot Trajectory Tracking Control System based on PID Feedforward Algorithm,” in 2022 IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI), May 2022, pp. 338–342, doi: 10.1109/ICETCI55101.2022.9832315.
T. Power and D. Berenson, “Learning a Generalizable Trajectory Sampling Distribution for Model Predictive Control,” IEEE Trans. Robot., pp. 1–18, 2024, doi: 10.1109/TRO.2024.3370026.
D. Zhang and B. Wei, “A review on model reference adaptive control of robotic manipulators,” Annu. Rev. Control, vol. 43, pp. 188–198, 2017, doi: 10.1016/j.arcontrol.2017.02.002.
L. Sciavicco and B. Siciliano, Modelling and Control of Robot Manipulators. London: Springer London, 2000.
Z. Wang and P. Keogh, “Active Vibration Control for Robotic Machining,” Nov. 2017, doi: 10.1115/IMECE2017-71670.
D. K. Thomsen, R. Søe-Knudsen, O. Balling, and X. Zhang, “Vibration control of industrial robot arms by multi-mode time-varying input shaping,” Mech. Mach. Theory, vol. 155, p. 104072, Jan. 2021, doi: 10.1016/j.mechmachtheory.2020.104072.
V. Nguyen, J. Johnson, and S. Melkote, “Active vibration suppression in robotic milling using optimal control,” Int. J. Mach. Tools Manuf., vol. 152, p. 103541, May 2020, doi: 10.1016/j.ijmachtools.2020.103541.
H. Pan and M. Xin, “Nonlinear robust and optimal control of robot manipulators,” Nonlinear Dyn., vol. 76, no. 1, pp. 237–254, Apr. 2014, doi: 10.1007/s11071-013-1123-1.
S. Islam and X. P. Liu, “Robust Sliding Mode Control for Robot Manipulators,” IEEE Trans. Ind. Electron., vol. 58, no. 6, pp. 2444–2453, Jun. 2011, doi: 10.1109/TIE.2010.2062472.
E. Olsson, P. Funk, and N. Xiong, “Fault diagnosis in industry using sensor readings and case-based reasoning,” J. Intell. Fuzzy Syst., vol. 15, pp. 41–46, 2004.
J. Hollerbach, W. Khalil, and M. Gautier, “Model Identification,” 2016, pp. 113–138.
J. Yang, D. Wang, B. Fan, D. Dong, and W. Zhou, “Online absolute pose compensation and steering control of industrial robot based on six degrees of freedom laser measurement,” Opt. Eng., vol. 56, no. 3, p. 034111, Mar. 2017, doi: 10.1117/1.OE.56.3.034111.
M. Ruderman, Analysis and Compensation of Kinetic Friction in Robotic and Mechatronic Control Systems. Boca Raton: CRC Press, 2023.
S. Zhen, Z. Zhao, X. Liu, F. Chen, H. Zhao, and Y.-H. Chen, “A Novel Practical Robust Control Inheriting PID for SCARA Robot,” IEEE Access, vol. 8, pp. 227409–227419, 2020, doi: 10.1109/ACCESS.2020.3045789.
P. Santana and L. Correia, “Swarm cognition on off-road autonomous robots,” Swarm Intell., vol. 5, no. 1, pp. 45–72, 2011, doi: 10.1007/s11721-010-0051-7.
J. N. Potter, S. A. Neild, and D. J. Wagg, “Generalisation and optimisation of semi-active, on–off switching controllers for single degree-of-freedom systems,” J. Sound Vib., vol. 329, no. 13, pp. 2450–2462, Jun. 2010, doi: 10.1016/j.jsv.2009.12.011.
T. Dewi, Y. Wijanarko, P. Risma, and Y. Oktarina, “Fuzzy Logic Controller Design for Leader-Follower Robot Navigation,” in 2018 5th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Oct. 2018, pp. 298–303, doi: 10.1109/EECSI.2018.8752696.
A. Pandey, R. K. Sonkar, K. K. Pandey, and D. R. Parhi, “Path planning navigation of mobile robot with obstacles avoidance using fuzzy logic controller,” in 2014 IEEE 8th International Conference on Intelligent Systems and Control (ISCO), Jan. 2014, pp. 39–41, doi: 10.1109/ISCO.2014.7103914.
L. Ran, Y. Zhang, Q. Zhang, and T. Yang, “Convolutional Neural Network-Based Robot Navigation Using Uncalibrated Spherical Images,” Sensors, vol. 17, no. 6, p. 1341, Jun. 2017, doi: 10.3390/s17061341.
S. Kulik and A. Shtanko, “Using convolutional neural networks for recognition of objects varied in appearance in computer vision for intellectual robots,” Procedia Comput. Sci., vol. 169, pp. 164–167, 2020, doi: 10.1016/j.procs.2020.02.129.