Optimal Control and Grasping for a Robotic Hand with a Non-linked Double Tendon Arrangement
Keywords:
control theory, robotic hand, optimal PI, Web applicationAbstract
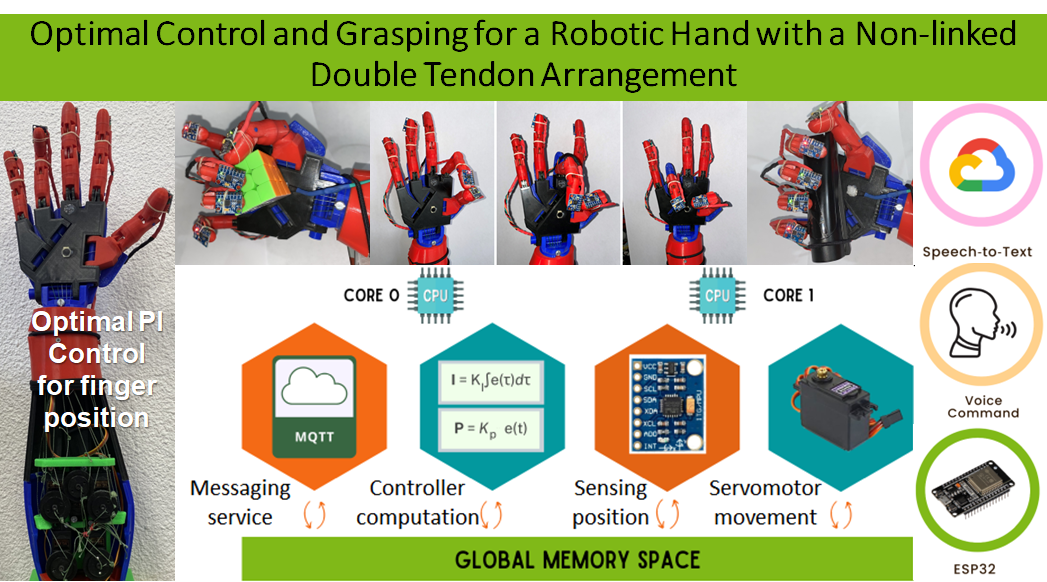
After comparing different robotic hand projects, a problem is identified: when a finger has a degree of freedom, the hand is unable to grasp irregularly shaped objects. This article proposes a solution. The use of a non-linked doubletendon arrangement in the fingers allows them to have free movement; coupled with the use of Inertial Measurement Units to determine its position, ensures that, despite having one degree of freedom per finger, the hand can effectively grasp irregular objects. Additionally, a web application is developed to control hand movements through voice commands. Finally, due to the necessity for these types of devices to be mobile, an optimal control law is used to minimize energy consumption, thereby increasing autonomy when the hand is powered by batteries. As an additional note, the conducted experiments reveal that the movement of all fingers occurs simultaneously, demonstrating that parallel multitasking programming techniques effectively fulfill that purpose.
Downloads
References
A. J. Berger and R. A. Meals, “Management of osteoarthrosis of the thumb joints,” The Journal of hand surgery, vol. 40, no. 4, pp. 843–850, 2015. doi: https://doi.org/10.1016/j.jhsa.2014.11.026.
C. Piazza, G. Grioli, M. G. Catalano, and A. Bicchi, “A century of robotic hands,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 2, pp. 1–32, 2019. doi: https://doi.org/10.1146/annurev-control-060117-105003.
Robotis, “Robotis.” http://en.robotis.com/. consulted in 2023.
Shadow Robot Company, “Shadow robot company.” https://www.shadowrobot.com/. consulted in 2023.
Barrett Technology, “Barrett technology.” https://advanced.barrett.com/. consulted in 2023.
Robotiq, “Robotiq.” https://robotiq.com/. consulted in 2023.
Yujin Robot, “Yujin robot.” YujinRobot. consulted in 2023.
O. Bionics, “Ada robotic hand.” https://www.thingiverse.com/thing:1294517. consulted in 2023.
D. Burton, “Robotic or prosthetic hand.” https://www.thingiverse.com/thing:1830958. consulted in 2023.
R. Gross, “Humanoid robotic hand.” https://www.thingiverse.com/thing:2269115. consulted in 2023.
L. Duran, “Prototype for the lad robotic hand- finger.” https://www.thingiverse.com/thing:3742369. consulted in 2023.
L. Riaud, “Robotic hand.” https://www.thingiverse.com/thing:2926729. consulted in 2023.
Thingiverse, “Prosthetic hand designs.” https://bit.ly/3LOGUZ5. consulted in 2023.
Q. Zhou, N. Jiang, and B. Hudgins, “Improved phoneme-based myoelectric speech recognition,” IEEE Transactions on Biomedical Engineering, vol. 56, no. 8, pp. 2016–2023, 2009. doi: https://doi.org/10.1109/TBME.2009.2024079.
E. Gruppioni, B. Saldutto, A. Cutti, E. Mainardi, and A. Davalli, “A voice-controlled prosthesis: test of a vocabulary and development of the prototype,” Myoelectric Symposium, 2008.
R. Ortega-Palacios, J. Bueno-Lamas, J. Vázquez-López, J. Salgado-Ramírez, I. Ortiz-Hernández, A. Vera, and L. Leija, “Low-cost upper limb prosthesis, based on opensource projects with voice-myoelectric hybrid control,” in 2018 Global Medical Engineering Physics Exchanges/Pan American Health Care Exchanges (GMEPE/PAHCE),pp. 1–5, IEEE, 2018. doi: https://doi.org/10.1109/GMEPE-PAHCE.2018.8400727.
Q. K. Pham, T. V. Vo, and P. T. Tran, “On the implementation of a low-cost mind-voice-and-gesture-controlled humanoid robotic arm using leap motion and neurosky sensor,” Journal of Electrical Engineering & Technology, pp. 1–19, 2022. doi: https://doi.org/10.1007/s42835-021-00903-5.
G. Jang, C. Lee, H. Lee, and Y. Choi, “Robotic index finger prosthesis using stackable double 4-bar mechanisms,” Mechatronics, vol. 23, no. 3, pp. 318–325, 2013. doi: https://doi.org/10.1016/j.mechatronics.2013.01.006.
X. Li, Q. Huang, X. Chen, Z. Yu, J. Zhu, and J. Han, “A novel underactuated bionic hand and its grasping stability analysis,” Advances in Mechanical Engineering, vol. 9, no. 2, 2017. doi: https://doi.org/10.1177/1687814016688859.
H. Deng, H. Luo, R. Wang, and Y. Zhang, “Grasping Force Planning and Control for Tendon-driven Anthropomorphic Prosthetic Hands,” Journal of Bionic Engineering, vol. 15, no. 5, pp. 795–804, 2018. doi: https://doi.org/10.1007/s42235-018-0067-z.
Y.-w. Liu, F. Feng, and Y.-f. Gao, “HIT prosthetic hand based on tendondriven mechanism,” Journal of Central South University, vol. 21, no. 5, pp. 1778–1791, 2014. doi: https://doi.org/10.1007/s11771-014-2124-z.
H. Luo, X. Duan, and H. Deng, “Sliding mode impedance control of a underactuated prosthetic hand,” in 2014 IEEE International Conference on Information and Automation (ICIA), pp. 726–729, IEEE, 2014. doi:https://doi.org/10.1109/ICInfA.2014.6932747.
R. Wang, X. Duan, and H. Deng, “Grasping position estimation for prosthetic hand,” in 2015 International Conference on Test, Measurement and Computational Methods, Atlantis Press, 2015. doi:doi.org/10.2991/tmcm-15.2015.16.
G. Langevin, “Inmoov project.” http://inmoov.fr/. consulted in 2023.
S. R. Kashef, S. Amini, and A. Akbarzadeh, “Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria,” Mechanism and Machine Theory, vol. 145, p. 103677, 2020. doi: https://doi.org/10.1016/j.mechmachtheory.2019.103677.
J. A. Lealndash, C. R. Torres-San Miguel, M. F. Carbajalndash, L. Martinez-Saez, et al., “Structural numerical analysis of a three fingers prosthetic hand prototype,” International Journal of Physical Sciences, vol. 8, no. 13, pp. 526–536, 2013. doi: https://doi.org/10.5897/IJPS2013.3824.
A. A. M. Faudzi, J. Ooga, T. Goto, M. Takeichi, and K. Suzumori, “Index finger of a human-like robotic hand using thin soft muscles,” IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 92–99, 2017. doi: https://doi.org/10.1109/LRA.2017.2732059.
T. Ko, H. Kaminaga, and Y. Nakamura, “Underactuated four-fingered hand with five electro hydrostatic actuators in cluster,” in 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 620–625, IEEE, 2017. doi: doi.org/10.1109/icra.2017.7989077.
N. Omarkulov, K. Telegenov, M. Zeinullin, A. Begalinova, and A. Shintemirov, “Design and analysis of an underactuated anthropomorphic finger for upper limb prosthetics,” in 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), pp. 2474–2477, IEEE, 2015. doi: doi.org/10.1109/embc.2015.7318895.
D. Yoon and Y. Choi, “Underactuated finger mechanism using contractible slider-cranks and stackable four-bar linkages,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 5, pp. 2046–2057, 2017. doi: doi.org/10.1109/tmech.2017.2723718.
M. Cheng, L. Jiang, F. Ni, S. Fan, Y. Liu, and H. Liu, “Design of a highly integrated underactuated finger towards prosthetic hand,” in 2017 IEEEInternational Conference on Advanced Intelligent Mechatronics (AIM), pp. 1035–1040, IEEE, 2017. doi: doi.org/10.1109/aim.2017.8014155.
Z. Xu and E. Todorov, “Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration,” in 2016 IEEE International Conference on Robotics and Automation (ICRA), pp. 3485–3492, IEEE, 2016. doi: doi.org/10.1109/icra.2016.7487528.
M. S. Bahari, A. Jaffar, C. Y. Low, R. Jaafar, K. Roese, and H. Yussof, “Design and development of a multifingered prosthetic hand,” International Journal of Social Robotics, vol. 4, no. 1, pp. 59–66, 2012. doi: https://doi.org/10.1007/s12369-011-0133-8.
J.-B. He, Q.-G. Wang, and T.-H. Lee, “PI/PID controller tuning via LQR approach,” Chemical Engineering Science, vol. 55, no. 13, pp. 2429–2439, 2000. doi: https://doi.org/10.1016/S0009-2509(99)00512-6.
S. I. Yaniger, “Force sensing resistors: A review of the technology,” in Electro International, 1991, pp. 666–668, IEEE, 1991. doi: doi.org/10.1109/electr.1991.718294.
M. Ceccarelli, N. E. N. Rodriguez, and G. Carbone, “Design and tests of a three finger hand with 1-dof articulated fingers,” Robotica, vol. 24, no. 2, pp. 183–196, 2006. doi: https://doi.org/10.1017/S0263574705002018.
ETC2. https://www.alldatasheet.com/datasheet-pdf/pdf/1132435/ETC2/MG995.html. consulted in 2023.
InvenSense, “MPU-6050 Product specification.” https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf. consulted in 2023.
M. R. Cutkosky et al., “On grasp choice, grasp models, and the design of hands for manufacturing tasks.,” IEEE Transactions on robotics and automation, vol. 5, no. 3, pp. 269–279, 1989. doi: http://dx.doi.org/10.1109/70.34763.
G. C. Hillar, MQTT Essentials-A lightweight IoT protocol. Birmingham, UK: Packt Publishing Ltd, 2017.
J. Mankar, C. Darode, K. Trivedi, M. Kanoje, and P. Shahare, “Review of I2C protocol,” International Journal of Research in Advent Technology, vol. 2, no. 1, 2014.
Google, “Speech-to-text.” https://cloud.google.com/speech-to-text. consulted in 2023.
Kirk, Donald E., Optimal control theory: an introduction. Courier Corporation, 2004.
Athans, Michael and Falb, Peter L., Optimal control: an introduction to the theory and its applications. North Chelmsford, Massachusetts: Courier Corporation, 2013.
Rodríguez-Guerrero, Liliam and Santos-Sánchez, Omar J. and Velasco-Rebollo, Rodrigo E. and García-Samperio, César A., “Network-based control system to compensate the input delay and minimize energy expenditure of a cooling plant,” in 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), pp. 1–6, IEEE, 2018.
W. Bolton, Instrumentation and control systems. 8–11 Southampton Street, London: Newnes, 2021.
K. J. Åström, T. Hägglund, and K. J. Astrom, Advanced PID control, vol. 461. Research Triangle Park, NC 27709: ISA-The Instrumentation, Systems, and Automation Society, 2006.
B. Beauregard, “Arduino pid library - version 1.2.1.” https://github.com/br3ttb/Arduino-PID-Library. consulted in 2023.
T. Asfour and R. Dillmann, “Design of the tuat/karlsruhe humanoid hand,” in Proceedings of the Second International Symposium Humanoid Robots, Japan, 2000. doi: https://doi.org/10.1109/IROS.2000.895225.
H. Khakpour and L. Birglen, “Numerical analysis of the grasp configuration of a planar 3-dof linkage-driven underactuated finger,” Journal of Computational and Nonlinear Dynamics, vol. 8, no. 2, 2013. doi: https://doi.org/10.1115/1.4007359.
T. Laliberté and C. M. Gosselin, “Underactuation in space robotic hands,” in Proceeding of the Sixth International Symposium on Artificial Intelligence, Robotics and Automation in Space ISAIRAS: A New Space Odyssey, 2001.
D. Mu and Z. Huang, “A new type of parallel finger mechanism,” in 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 584–588, IEEE, 2007. doi: doi.org/10.1109/robio.2007.4522227.
K. Tae-Uk and O. Yonghwan, “Design of spatial adaptive fingered gripper using spherical five-bar mechanism,” in Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, pp. 145–150, IEEE, 2014. doi: doi.org/10.1109/icamechs.2014.6911640.
J. Jin, W. Zhang, Z. Sun, and Q. Chen, “Lisa hand: Indirect selfadaptive robotic hand for robust grasping and simplicity,” in 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2393–2398, IEEE, 2012. doi: doi.org/10.1109/robio.2012.6491328.
N. E. N. Rodriguez, G. Carbone, and M. Ceccarelli, “Optimal design of driving mechanism in a 1-dof anthropomorphic finger,” Mechanism and machine theory, vol. 41, no. 8, pp. 897–911, 2006. doi: doi.org/10.1016/j.mechmachtheory.2006.03.016.