Analysis and Virtual Validation of Vehicle Dynamics Models for Electronic Stability Control
Keywords:
Vehicle dynamics, Electronic Stability Control, Vehicle Model, VI-CarRealTimeAbstract
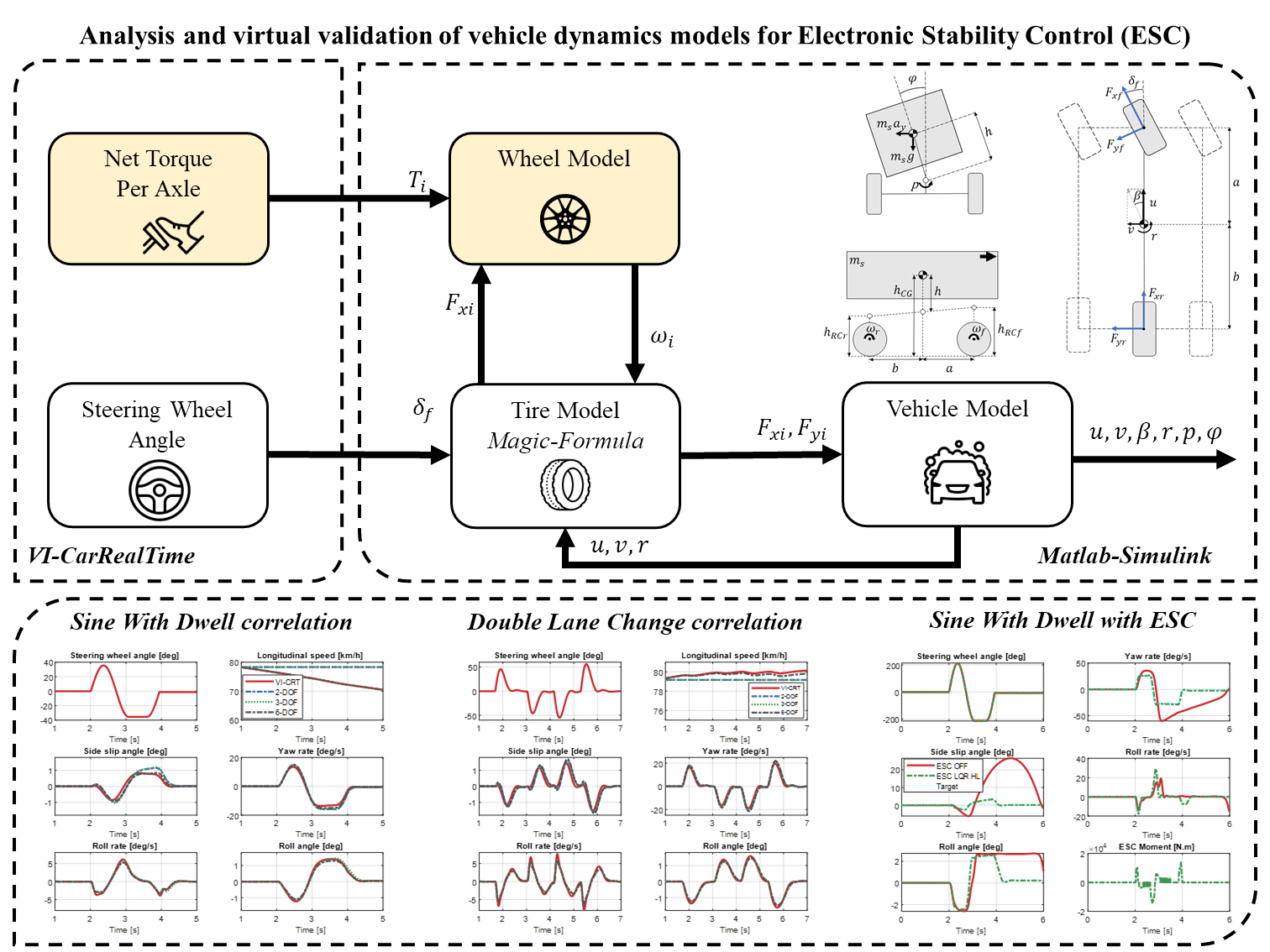
This work investigates the utility and efficiency of simplified vehicle dynamics models in the Electronic Stability Control (ESC) context. The focus is not merely on the correlation between simplified and complex models but on the added value such models can bring to the automotive industry. By comparing the simplified models based on bicycle representation with a high-fidelity VI-CarRealTime (VI-CRT) model, this paper demonstrates that the simplified models have good correlation and offer computational advantages. This approach addresses the key dynamics essential for ESC and considers a generic sedan vehicle model to simulate standard maneuvers widely performed by the automotive industry. All the proposed models are nonlinear and include tire modeling based on the Magic Formula, with parameters derived from experimental tests. The paper also introduces a methodology for parameter optimization, enhancing the model's accuracy and reliability. The results indicate that the simplified models can be a viable alternative for specific applications such as control strategy tuning, rapid prototyping, and early-stage development. This work aims to fill the gap in the literature concerning the practical applicability and limitations of simplified vehicle dynamics models, thereby making a significant contribution to the field.
Downloads
References
A. d. S. Mendes, D. D. R. Meneghetti, M. Ackermann, and A. d. T. Fleury, “Vehicle dynamics-lateral: Open source simulation package for matlab,” 2016.
M. M Ibrahim, K. A Abd El-Gwwad, M. MM Salem, and M. Mourad, “Investigate vehicle design parameters effect on dynamic vehicle stability,” Journal of Advanced Engineering Trends, 2020.
E. Sondhi and P. Perinciolo, “Model based handling analyses,” 2018.
D. Xu, G. Wang, L. Qu, and C. Ge, “Robust control with uncertain disturbances for vehicle drift motions,” Applied Sciences, 2021.
M. A. Hassan, M. A. Abdelkareem, G. Tan, and M. Moheyeldein, “A monte carlo parametric sensitivity analysis of automobile handling, comfort, and stability,” Shock and Vibration, 2021.
G. Mastinu, D. Biggio, F. Della Rossa, and M. Fainello, “Straight running stability of automobiles: experiments with a driving simulator,” Nonlinear Dynamics, 2020.
J. Cao, L. Jing, K. Guo, F. Yu et al., “Study on integrated control of vehicle yaw and rollover stability using nonlinear prediction model,” Mathematical Problems in Engineering, 2013.
J. C. Limroth and T. Kurfess, “Real-time vehicle parameter estimation and equivalent moment electronic stability control,” International Journal of Vehicle Design, 2015.
Z. R. M. J´unior, A. Murilo, and R. V. Lopes, “Vehicle stability upper-level-controller based on parameterized model predictive control,” IEEE Access, 2022.
SAE J670, SAE International, 2008.
R. Jazar, Vehicle Dynamics. Springer, 2008.
H. Pacejka, Tyre and Vehicle Dynamics, ser. Automotive engineering. Butterworth-Heinemann, 2006.
G. Genta and L. Morello, The Automotive Chassis: Volume 1: Components Design, ser. Mechanical Engineering Series. Springer International Publishing, 2019.
B. Minaker, Fundamentals of Vehicle Dynamics and Modelling: A Textbook for Engineers With Illustrations and Examples, ser. Automotive Series. Wiley, 2019.
T. Gillespie, Fundamentals of Vehicle Dynamics, ser. Premiere Series Bks. Society of Automotive Engineers, 1992.
E. Bakker, L. Nyborg, and H. B. Pacejka, “Tyre modelling for use in vehicle dynamics studies,” SAE Transactions, 1987.
Adams 2021.2 - Online Help (HTML), https://help.mscsoftware.com/bundle/adamsPackage/tire/tiremodelspac2002/tire.models.pac2002.xhtml, Hexagon, 2022.
A. Ulsoy, H. Peng, and M. Cakmakci, Automotive Control Systems, 2012.
VI-CarRealTime 20.3 Documentation, VI-grade GmbH, Darmstadt, Alemanha, 2021.
Matlab, “Optimization toolbox r2020b,” Natick, Massachusetts, United States, 2020. [Online]. Available: https://www.mathworks.com
Regulation No. 140, Economic Commission for Europe of the United Nations, 2018.
J. Hair, W. Black, B. Babin, and R. Anderson, Multivariate Data Analysis. Pearson Education Limited, 2013.