DonkieTown: a Low-cost Experimental Testbed for Research on Autonomous Cars
Keywords:
self-driving cars, low-cost testbeds, mobile robotics, autonomous driving, ROSAbstract
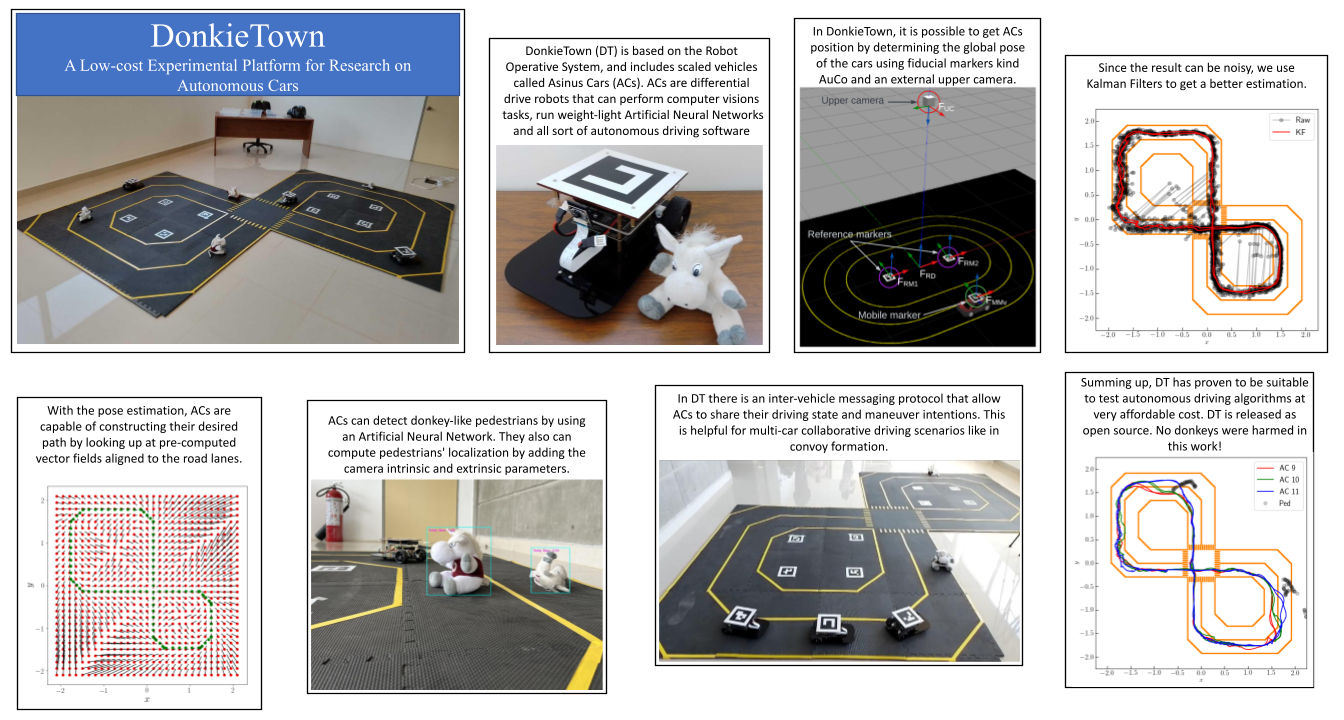
In this work, DonkieTown is introduced, an affordable and scalable platform for research on autonomous vehicles. The experimental framework was developed in the Robot Operative System (ROS). The platform integrates multiple small scale autonomous vehicles called Asinus Cars, which are equipped with at least a camera, odometer, and onboard computer. The vehicles are Differential Drive Robots (DDR), forced by software to behave as car-like vehicles. DonkieTown incorporates a low-cost localization system to provide the real-time vehicles' pose, by means of external cameras which detect ArUco markers, then Kalman Filters (KF) are used to track and estimate the pose of each vehicle. The platform includes a base station computer with a graphical interface for monitoring the system. DonkieTown also includes a series of algorithms to facilitate autonomous driving, such as communication, tracking, object detection, obstacle avoidance, control, trajectory tracking, etc. Moreover, a centralized vehicular network is implemented to allow communication between the agents and the base station, where the agents can share information about their state, obstacles, maneuver intentions, etc. To facilitate the research on autonomous cars in Latin America, the developed libraries are released as open source. Real-time experiments demonstrate the performance of DonkieTown in autonomous driving missions, such as following a lane while avoiding Donkey-like obstacles, and collaborative autonomous driving in convoy.
Downloads
References
`[1] I. Yaqoob, L. U. Khan, S. M. A. Kazmi, M. Imran, N. Guizani, and
C. S. Hong, “Autonomous driving cars in smart cities: Recent advances,
requirements, and challenges,” IEEE Network, vol. 34, no. 1, pp. 174–
, 2020.
M. Taiebat, A. L. Brown, H. R. Safford, S. Qu, and M. Xu, “A review
on energy, environmental, and sustainability implications of connected
and automated vehicles,” Environmental Science & Technology, vol. 52,
no. 20, pp. 11449–11465, 2018. PMID: 30192527.
B. Häfner, V. Bajpai, J. Ott, and G. A. Schmitt, “A survey on cooperative
architectures and maneuvers for connected and automated vehicles,”
IEEE Communications Surveys & Tutorials, vol. 24, no. 1, pp. 380–
, 2022.
J. R. Sayer, “Connected/automated vehicle and infrastructure research
[michigan mobility transformation facility (mtf)],” tech. rep., University
of Michigan Transportation Research Institute, 2021.
D. Singh, E. Trivedi, Y. Sharma, and V. Niranjan, “Turtlebot: Design
and hardware component selection,” in 2018 International Conference
on Computing, Power and Communication Technologies (GUCON),
pp. 805–809, 2018.
M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger,
R. Wheeler, and A. Ng, “Ros: an open-source robot operating system,”
in Proc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA)
Workshop on Open Source Robotics, (Kobe, Japan), May 2009.
K. Alomari., R. Mendoza., S. Sundermann., D. Goehring., and R. Rojas.,
“Fuzzy logic-based adaptive cruise control for autonomous model car,”
in Proceedings of the International Conference on Robotics, Computer
Vision and Intelligent Systems - ROBOVIS,, pp. 121–130, INSTICC,
SciTePress, 2020.
J. Gonzales, F. Zhang, K. Li, and F. Borrelli, “Autonomous drifting with
onboard sensors,” in Advanced Vehicle Control, 2016.
S. Karaman, A. Anders, M. Boulet, J. Connor, K. Gregson, W. Guerra,
O. Guldner, M. Mohamoud, B. Plancher, R. Shin, and J. Vivilec-
chia, “Project-based, collaborative, algorithmic robotics for high school
students: Programming self-driving race cars at mit,” in 2017 IEEE
Integrated STEM Education Conference (ISEC), pp. 195–203, 2017.
N. Hyldmar, Y. He, and A. Prorok, “A fleet of miniature cars for
experiments in cooperative driving,” CoRR, vol. abs/1902.06133, 2019.
L. Beaver, B. Chalaki, A. M. Mahbub, L. Zhao, R. Zayas, and A. Ma-
likopoulos, “Demonstration of a time-efficient mobility system using a
scaled smart city,” Vehicle System Dynamics, vol. 58, no. 5, p. 787–804,
L. Paull, J. Tani, H. Ahn, J. Alonso-Mora, L. Carlone, M. Cap, Y. F.
Chen, C. Choi, J. Dusek, Y. Fang, D. Hoehener, S.-Y. Liu, M. Novitzky,
I. F. Okuyama, J. Pazis, G. Rosman, V. Varricchio, H.-C. Wang,
D. Yershov, H. Zhao, M. Benjamin, C. Carr, M. Zuber, S. Karaman,
E. Frazzoli, D. Del Vecchio, D. Rus, J. How, J. Leonard, and A. Censi,
“Duckietown: An open, inexpensive and flexible platform for autonomy
education and research,” in 2017 IEEE International Conference on
Robotics and Automation (ICRA), pp. 1497–1504, 2017.
S. Roos-Hoefgeest, I. A. Garcia, and R. C. Gonzalez, “Mobile robot
localization in industrial environments using a ring of cameras and
aruco markers,” in IECON 2021–47th Annual Conference of the IEEE
Industrial Electronics Society, pp. 1–6, IEEE, 2021.
S. Garrido-Jurado, R. Muñoz, F. Madrid, and M. Marín-Jiménez, “Auto-
matic generation and detection of highly reliable fiducial markers under
occlusion,” Pattern Recognition, vol. 47, p. 2280–2292, 06 2014.
A. Botta and G. Quaglia, “Performance analysis of low-cost tracking
system for mobile robots,” Machines, vol. 8, no. 2, 2020.
M. W. Spong, Robot Dynamics and Control. USA: John Wiley & Sons,
Inc., 1st ed., 1989.
B. Sahbani and W. Adiprawita, “Kalman filter and iterative-hungarian
algorithm implementation for low complexity point tracking as part
of fast multiple object tracking system,” in 2016 6th International
Conference on System Engineering and Technology (ICSET), pp. 109–
, 2016.
M. García-Venegas, D. A. Mercado-Ravell, L. A. Pinedo-Sánchez, and
C. A. Carballo-Monsivais, “On the safety of vulnerable road users by
cyclist detection and tracking,” Machine Vision and Applications, vol. 32,
no. 5, p. 109, 2021.
ETSI, “Intelligent Transport Systems (ITS); Vehicular Communications;
Basica Set of Applications; Part 2: Specific of Cooperative Awareness
Basic Service.,” standard, European Telecommunications Stadards Insti-
tute, Sofia Antipolis Cedex, France, Nov. 2014.
ETSI, “Intelligent Transport Systems (ITS); Vehicular Communications;
Basica Set of Applications; Part 3: Specifications of Descentralized Envi-
ronmental Notification Basic Service.,” standard, European Telecommu-
nications Stadards Institute, Sofia Antipolis Cedex, France, Nov. 2014.
A. Lopez-Gonzalez, E. Ferreira, E. G. Hernández-Martínez, J.-J. Flores-
Godoy, G. Fernandez-Anaya, and P. Paniagua-Contro, “Multi-robot
formation control using distance and orientation,” Advanced Robotics,
vol. 30, no. 14, pp. 901–913, 2016.
W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu, and
A. C. Berg, “Ssd: Single shot multibox detector,” in Computer Vision
– ECCV 2016 (B. Leibe, J. Matas, N. Sebe, and M. Welling, eds.),
(Cham), pp. 21–37, Springer International Publishing, 2016.
A. G. Howard, M. Zhu, B. Chen, D. Kalenichenko, W. Wang, T. Weyand,
M. Andreetto, and H. Adam, “Mobilenets: Efficient convolutional neural
networks for mobile vision applications,” 2017.
M. Everingham, L. Van Gool, C. K. I. Williams, J. Winn, and A. Zisser-
man, “The pascal visual object classes (voc) challenge,” International
Journal of Computer Vision, vol. 88, pp. 303–338, June 2010.
P. Corke, Robotics, Vision and Control: Fundamental Algorithms in
MATLAB. Springer Publishing Company, Incorporated, 1st ed., 2013.