Body orientation estimation through graph representation: Expanding accuracy with Data Augmentation and Gradient Boosting
Keywords:
Computer vision, body orientation, XGBoost, OpenPoseAbstract
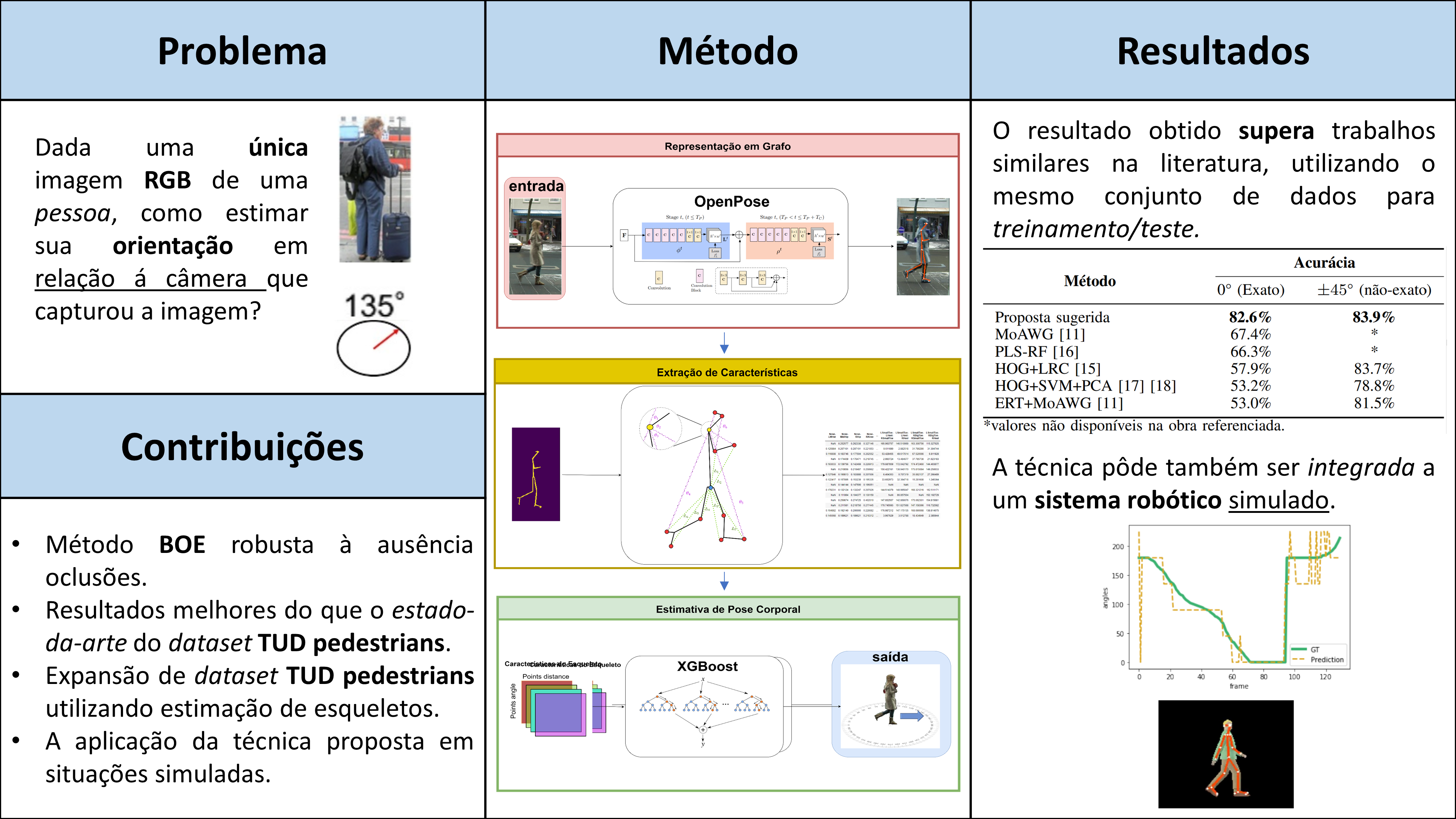
Body Orientation Estimation (BOE) is important for a wide array of applications, including robotics, surveillance and consumer analysis. Although multi-sensor approaches are effective, they are not a viable option for in the wild scenarios; the usual approach in such cases is to use single camera images, with imprecise results. Some applications that deal with people benefit from obtaining 2D human skeletons for gesture recognition, and these skeletons bring valuable information about the person's pose. It is proposed to build a 2D skeleton via OpenPose and using its data as training data on XGBoost to detect BOE. To evaluate predictions considering real situations based on a single camera, the TUD Multiview Pedestrian dataset is used and extended considering that a single person is originally considered in images where more people were often identified. It is compared the proposed approach against various state-of-the-art methods and our results indicate better performance. Finally, it is proved that our method is viable for BOE in real-time scenarios by presenting case studies on simulated scenes.
Downloads
References
B. Lewandowski, D. Seichter, T. Wengefeld, L. Pfennig, H. Drumm, andH.-M. Gross, “Deep orientation: Fast and robust upper body orientationestimation for mobile robotic applications,” inwill be published onInternational Conference on Intelligent Robots and Systems (IROS),2019.[2] S. Müller, T. Wengefeld, T. Q. Trinh, D. Aganian, M. Eisenbach, andH.-M. Gross, “A multi-modal person perception framework for sociallyinteractive mobile service robots,”Sensors, vol. 20, no. 3, p. 722, 2020.[3] P. Liu, W. Liu, and H. Ma, “Weighted sequence loss based spatial-temporal deep learning framework for human body orientation estima-tion,” in2017 IEEE International Conference on Multimedia and Expo(ICME), pp. 97–102, 2017.[4] Z. Cao, G. Hidalgo, T. Simon, S.-E. Wei, and Y. Sheikh, “Openpose:realtime multi-person 2d pose estimation using part affinity fields,”arXivpreprint arXiv:1812.08008, 2018.[5] M. Andriluka, S. Roth, and B. Schiele, “Monocular 3d pose estimationand tracking by detection,” in2010 IEEE Computer Society Conferenceon Computer Vision and Pattern Recognition, pp. 623–630, IEEE, 2010.[6] A. Sebti and H. Hassanpour, “Body orientation estimation with theensemble of logistic regression classifiers,”Multimedia Tools and Ap-plications, vol. 76, no. 22, pp. 23589–23605, 2017.[7] T. Wengefeld, B. Lewandowski, D. Seichter, L. Pfennig, and H.-M.Gross, “Real-time person orientation estimation using colored point-clouds,” in2019 European Conference on Mobile Robots (ECMR),pp. 1–7, 2019.[8] M. M. Islam, A. Lam, H. Fukuda, Y. Kobayashi, and Y. Kuno, “A person-following shopping support robot based on human pose skeleton dataand lidar sensor,” inInternational Conference on Intelligent Computing,pp. 9–19, 2019.[9] T. Chen and C. Guestrin, “Xgboost: A scalable tree boosting system,”inProceedings of the 22nd acm sigkdd international conference onknowledge discovery and data mining, pp. 785–794, 2016.[10] H. W. Kuhn, “The hungarian method for the assignment problem,”Navalresearch logistics quarterly, vol. 2, no. 1-2, pp. 83–97, 1955.[11] D. Baltieri, R. Vezzani, and R. Cucchiara, “People orientation recogni-tion by mixtures of wrapped distributions on random trees,” inEuropeanconference on computer vision, pp. 270–283, Springer, 2012.[12] D. Heo, J. Y. Nam, and B. C. Ko, “Estimation of pedestrian pose ori-entation using soft target training based on teacher–student framework,”Sensors, vol. 19, no. 5, p. 1147, 2019.[13] C. J. Bray Jr, “An ordination of the upland forest communities ofsouthern wisconsin. ecol monogr. 27: 325–349,” 1957.[14] D. Zwillinger,CRC standard mathematical tables and formulae. CRCpress, 2002.[15] A. Sebti and H. Hassanpour, “Body orientation estimation with theensemble of logistic regression classifiers,”Multimedia Tools and Ap-plications, vol. 76, no. 22, pp. 23589–23605, 2017.[16] I. Ardiyanto and J. Miura, “Partial least squares-based human upper bodyorientation estimation with combined detection and tracking,”Image andVision Computing, vol. 32, no. 11, pp. 904–915, 2014.[17] M. Enzweiler and D. M. Gavrila, “Integrated pedestrian classificationand orientation estimation,” in2010 IEEE Computer Society Conferenceon Computer Vision and Pattern Recognition, pp. 982–989, IEEE, 2010.[18] T. Gandhi and M. M. Trivedi, “Image based estimation of pedestrianorientation for improving path prediction,” in2008 IEEE IntelligentVehicles Symposium, pp. 506–511, IEEE, 2008.[19] E. Rohmer, S. P. Singh, and M. Freese, “Coppeliasim (formerly v-rep):a versatile and scalable robot simulation framework,” inProceedingsof The International Conference on Intelligent Robots and Systems(IROS),(Tokyo). Available online at: www. coppeliarobotics. com, 2013.