Sliding Mode Control with Gaussian Process Regression for Underactuated Mechanical Systems
Keywords:
Gaussian process regression, Intelligent control, Inverted pendulum, Sliding modes, Underactuated systemsAbstract
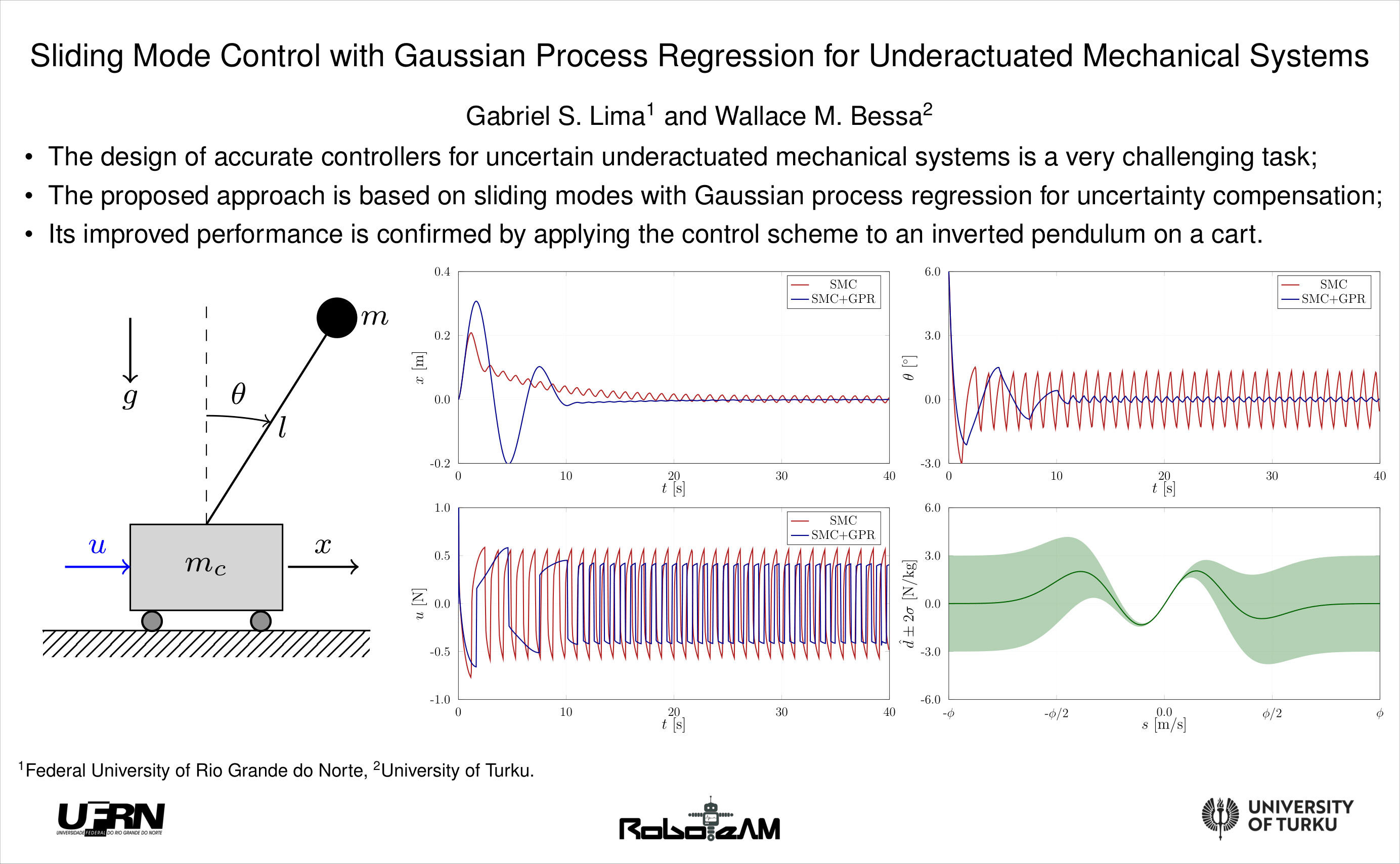
This work introduces a new control scheme for uncertain underactuated mechanical systems. The proposed approach is mainly based on sliding mode control, but a Gaussian process regressor is also embedded in the control law for uncertainty estimation and compensation. The convergence properties of the closed-loop signals are analytically proved by means of the Lyapunov stability theory. Numerical simulations with an inverted pendulum on a cart are presented to confirm the improved performance of the proposed control scheme.
Downloads
References
X. Xin and Y. Liu, "Reduced-order stable controllers for two-link underactuated planar robots," Automatica, vol. 49, no. 7, pp. 2176-2183, 2013.
Y. Lozano and O. Gutiérrez, "Design and control of a four-rotary-wing aircraft," IEEE Latin America Transactions, vol. 14, no. 11, pp. 4433-4438, 2016.
G.-H. Kim and K.-S. Hong, "Adaptive sliding-mode control of an offshore container crane with unknown disturbances," IEEE/ASME Transactions On Mechatronics, vol. 24, no. 6, pp. 2850-2861, 2019.
B. Yi, R. Ortega, I. R. Manchester, and H. Siguerdidjane, "Path following of a class of underactuated mechanical systems via immersion and invariance-based orbital stabilization," International Journal of Robust and Nonlinear Control, vol. 30, no. 18, pp. 8521-8544, 2020.
R. Seifried, Dynamics of underactuated multibody systems. Springer, 2014.
E. Franco, "Adaptive ida-pbc for underactuated mechanical systems with constant disturbances," International Journal of Adaptive Control and Signal Processing, vol. 33, no. 1, pp. 1-15, 2019.
M. Gnucci and R. Marino, "Adaptive tracking control for underactuated mechanical systems with relative degree two," Automatica, vol. 129, p. 109633, 2021.
H. Ashrafiuon and R. S. Erwin, "Sliding mode control of underactuated multibody systems and its application to shape change control," International Journal of Control, vol. 81, no. 12, pp. 1849-1858, 2008.
M. Ryalat and D. S. Laila, "A simplified ida-pbc design for underactuated mechanical systems with applications," European Journal of Control, vol. 27, pp. 1-16, 2016.
J. Huang, M. Zhang, S. Ri, C. Xiong, Z. Li, and Y. Kang, "High-order disturbance-observer-based sliding mode control for mobile wheeled inverted pendulum systems," IEEE Transactions on Industrial Electronics, vol. 67, no. 3, pp. 2030-2041, 2020.
D. N. Cardoso, S. Esteban, and G. V. Raffo, "A robust optimal control approach in the weighted sobolev space for underactuated mechanical systems," Automatica, vol. 125, p. 109474, 2021.
M. Tanaka, J. Macedo Fernandes, and W. M. Bessa, "Feedback linearization with fuzzy compensation for uncertain nonlinear systems," International Journal Of Computers Communications & Control. vol. 8,
p. 736-743, 2013.
B. Zhang, Z. Mao, and T. Zhang, "Intelligent control for hammerstein nonlinear systems with arbitrary deadzone input," Transactions of the Institute of Measurement and Control, vol. 39, no. 4, pp. 567-578, 2017.
D. Wang, H. He, and D. Liu, "Intelligent optimal control with critic learning for a nonlinear overhead crane system," IEEE Transactions on Industrial Informatics, vol. 14, no. 7, pp. 2932-2940, 2017.
L. B. P. do Nascimento, V. P. Pinto, and M. A. B. Amora, "Harmony search algorithm with adaptive parameters to optimize the linear quadratic regulator design," IEEE Latin America Transactions, vol. 16,
no. 7, pp. 1862-1869, 2018.
B. Xu, X. Wang, Y. Shou, P. Shi, and Z. Shi, "Finite-time robust intelligent control of strict-feedback nonlinear systems with flight dynamics application," IEEE Transactions on Neural Networks and Learning Systems, 2021.
W. M. Bessa, G. Brinkmann, D. A. Duecker, E. Kreuzer, and E. Solowjow, "A biologically inspired framework for the intelligent control of mechatronic systems and its application to a micro diving
agent," Mathematical problems in engineering, vol. 2018, 2018.
J.-J. E. Slotine, W. Li et al., Applied nonlinear control. Prentice hall Englewood Cliffs, NJ, 1991, vol. 199, no. 1.
W. M. Bessa, "Controle por Modos Deslizantes de Sistemas Dinâmicos com Zona Morta Aplicado ao Posicionamento de ROVs," Rio De Janeiro, 2005.
W. M. Bessa, "Some remarks on the boundedness and convergence properties of smooth sliding mode controllers," International Journal of Automation and Computing, vol. 6, no. 2, pp. 154-158, 2009.
J. Fang, L. Zhang, Z. Long, and M. Y. Wang, "Fuzzy adaptive sliding mode control for the precision position of piezo-actuated nano positioning stage," International Journal of Precision Engineering and
Manufacturing, vol. 19, no. 10, pp. 1447-1456, 2018.
W. M. Bessa, S. Otto, E. Kreuzer, and R. Seifried, "An adaptive fuzzy sliding mode controller for uncertain underactuated mechanical systems," Journal of Vibration and Control, vol. 25, no. 9, pp. 1521-
, 2019.
J.-S. Han, T.-I. Kim, T.-H. Oh, S.-H. Lee et al., "Effective disturbance compensation method under control saturation in discrete-time sliding mode control," IEEE Transactions on Industrial Electronics, vol. 67, no. 7, pp. 5696-5707, 2019.
D. Garcia, E. Gorrostieta, E. V. Soto, C. R. Rivero, and G. D. Delgado, "Learning from demonstration with gaussian process approach for an omni-directional mobile robot," IEEE Latin America Transactions,
vol. 16, no. 4, pp. 1250-1255, 2018.
C. K. Williams and C. E. Rasmussen, Gaussian processes for machine learning. MIT press Cambridge, MA, 2006, vol. 2, no. 3.
A. Marco, P. Hennig, J. Bohg, S. Schaal, and S. Trimpe, "Automatic lqr tuning based on gaussian process global optimization," in 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 270-277.
A. Marco, P. Hennig, S. Schaal, and S. Trimpe, "On the design of lqr kernels for efficient controller learning," in 2017 IEEE 56th Annual Conference on Decision and Control (CDC). IEEE, 2017, pp. 5193-
M. Neumann-Brosig, A. Marco, D. Schwarzmann, and S. Trimpe, "Data-efficient autotuning with bayesian optimization: An industrial control study," IEEE Transactions on Control Systems Technology, 2019.
V. Aran and M. Unel, "Gaussian process regression feedforward controller for diesel engine airpath," International Journal of Automotive Technology, vol. 19, no. 4, pp. 635-642, 2018.
G. S. Lima, W. M. Bessa, and S. Trimpe, "Depth control of underwater robots using sliding modes and gaussian process regression," in 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on
Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE). IEEE, 2018, pp. 8-12.
G. S. Lima, S. Trimpe, and W. M. Bessa, "Sliding mode control with gaussian process regression for underwater robots," Journal of Intelligent & Robotic Systems, pp. 1-12, 2020.
Bessa, W. & Kreuzer, E. Adaptive fuzzy sliding mode control of the cart-pole underactuated system. PAMM. 16, 799-800 (2016)