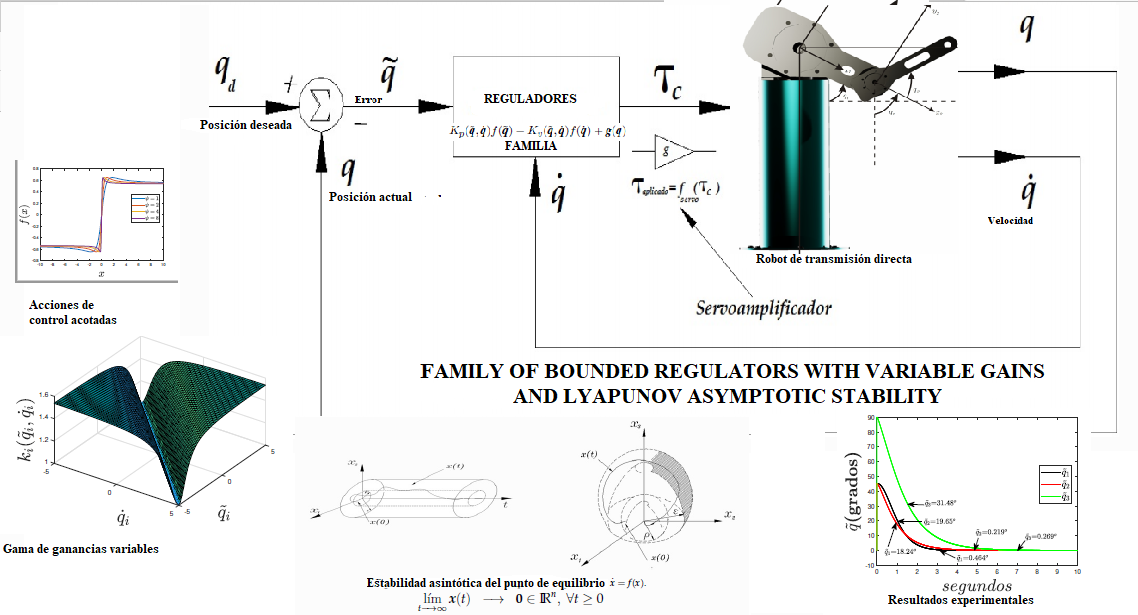
Family of Bounded Regulators with Variable Gains and Lyapunov Asymptotic Stability for Robot Manipulators
Keywords:
Variable Gains, Lyapunov Asymptotic Stability, Robot Manipulators, Saturation, RegulatorAbstract
In this paper, the regulation problem for robot manipulators in joint space through the proposal of a new family of bounded regulators with variable gains is presented. The proposed regulators have bounded functions that replace the classical position error and the velocity; moreover, the variable gains are formed by a family of Lipchitz functions with the position error and the velocity as their arguments. This structure avoids exceeding the physical limits of the servomotors. A strict Lyapunov function is proposed to demonstrate the global and asymptotic stability. Finally, the functionality and performance of the proposal are examined by experimental results on a direct-drive-robot of 3-degrees-of-freedom against the PD regulator
Downloads
References
V. Santibáñez, K. Camarillo, J. Moreno-Valenzuela, and R. Campa, “A practical PID regulator with bounded torques for robot manipulators,” International Journal Control Autom. Systems, vol. 8, pp. 544–555, 2010.
M. Mendoza, A. Zavala, V. Santibáñez, and F. Reyes, “A PID-type global regulators with simple tuning for robot manipulators with bounded torques,” In: 53rd IEEE Conference on Desicion and Control, Los Angeles, CA, USA, pp. 6335–6341, 2014.
F. Reyes, O. Félix, J. Cid, and G. Alonso, “A family of hyperbolic-type control schemes for robot manipulators,” Kypernetika, vol. 55, pp. 544–555, 2019.
F. Reyes and B. Al-Hadithi, “An asinh-type regulator for robot manipulators with global asymptotic stability,” Journal for Control, Measurement, Electronics, Computing and Communications, vol. 61, no. 4, pp. 574–586, 2020.
M. A. Limón-Diaz, F. Reyes-Cortés, and E. J. González-Galván, “Unbounded regulators with variable gains for a direct-drive robot manipulator,” Journal for Control, Measurement, Electronics, Computing and Communications, vol. 57, no. 2, pp. 484–495, 2016.
O. Arroyo, F. Reyes, A. Vargas, and S. Vergara, “Variable control gains for PD controller for robot manipulators,” In: 2015 International
Conference on Mechatronics Electronics and Automotive Engineering, pp. 187–192, 2015.
M. A. Limón-Díaz, F. Reyes, and E. González-Galvan, “Saturated regulation with derivative variable gain of robot manipulators,” Revista
Iberoamericana de Automática e Informática Industrial, vol. 14, pp. 434–445, 2017.
B. Sánchez-García, E. Rodríguez-Hernández, F. Reyes-Cortés, O. Félix-Beltrán, and B. Al-Hadithi, “An extended family of PD regulators
with variable gains,” In: Inter. Cong. de Ing. Electrónica (ELECTRO), Chihuahua, Chihuahua, México, pp. 47–52, Oct 2020.
B. Sánchez-García, F. Reyes-Cortés, B. Al-Hadithi, and O. Félix-Beltrán, “Global saturated regulator with variable gains for robot manipulators,” Journal of Robotics and Control, vol. 2, no. 6, pp. 571–581, 2021.
R. Kelly, R. Haber, R. Haber-Guerra, and F. Reyes, “Lyapunov stable control of robot manipulators: A fuzzy self-tuning procedure,” Intelligent Automation and Soft Computing, vol. 5, no. 4, pp. 313–326, 1999.
J. L. Meza, V. Santibáñez, R. Soto, and M. A. Llama, “A stable fuzzy self-tuning PID control of robot manipulators,” In: IEEE International conference on Systems, Man and Cybernetics SMC 2009, pp. 2624–2629, 2009.
J. Sifuentes-Mijares, V. Santibáñez, and J. L. Medina, “A globally asymptotically stable nonlinear PID regulator with fuzzy self-tuned pd
gains for robot manipulators,” In: 2014 World Automation Congress (WAC), pp. 573–578, Aug 2014.
J. Sifuentes-Mijares, V. Santibáñez, and J. L. Meza-Medina, “Nonlinear PID global regulators with selftuned PD gains for robot manipulators: theory and experimentation,” Journal Braz. Soc. Mech. Sci. Eng., vol. 43, no. 223, 2021.
G. Xiaobo, S. Aiguo, and Z. Yan, “Neural network control for telerehabilitation robot based on variable gain,” Biomedical Engineering
and Informatics, International Conference on 2, pp. 778–782, 2008.
H. Supriyono, M. O. Tokhi, and B. Zain, “Adaptive biologically-inspired algorithm-based controller tuning for input tracking control of flexible manipulators,” In: 2010 IEEE 9th International Conference on Cybernitc Intelligent Systems, UK, pp. 1–6, 2010.
J. Sánchez-Moreno, M. Guinaldo-Lozada, A. Visioli, and S. Dormido-Bencomo, “Identification and tuning methods por PI control systems based on symetric send-on-delta-sampling,” International Journal of Control, Automation and Systems, vol. 17, no. 11, pp. 2784–2795, 2019.
G. Baruah, S. Majhi, and C. Mahanta, “Auto-tuning of FOPI controllers for TITO processes with experimental validation,” International Journal of Automation and Computing, vol. 16, no. 5, pp. 589–603, 2019.
F. Memon and C. Shao, “An optimal approach to online tuning method for PID type iterative learning control,” International Journal of Control, Automation and Systems, vol. 18, no. 8, pp. 1926–1935, 2020.
S. Alvarez-Rodríguez and G. Flores, “PID principles to obtain adaptive variable gains for a bi-order sliding mode control,” International Journal of Control, Automation and Systems, vol. 18, no. 10, pp. 2456–2467, 2020.
C. Chávez-Olivares, F. Reyes-Cortés, E. González-Galván, M. Mendoza-Gutiérrez, and i. Bonilla-Guitiérrez, “Experimental evaluation of parameter identification schemes on a direct-drive robot,” Proccedings of the Institution of Mechanical Engineers, Part 1: Journal of Systems and Control Engineering, vol. 226, no. 10, pp. 1419–1431, 2012.