Purcell's three-link microswimmer based on IPMC: Simulations in COMSOL Multiphysics
Keywords:
Flexible, IPMC, Link, Microswimmer, Motion, Non-reciprocal, PurcellAbstract
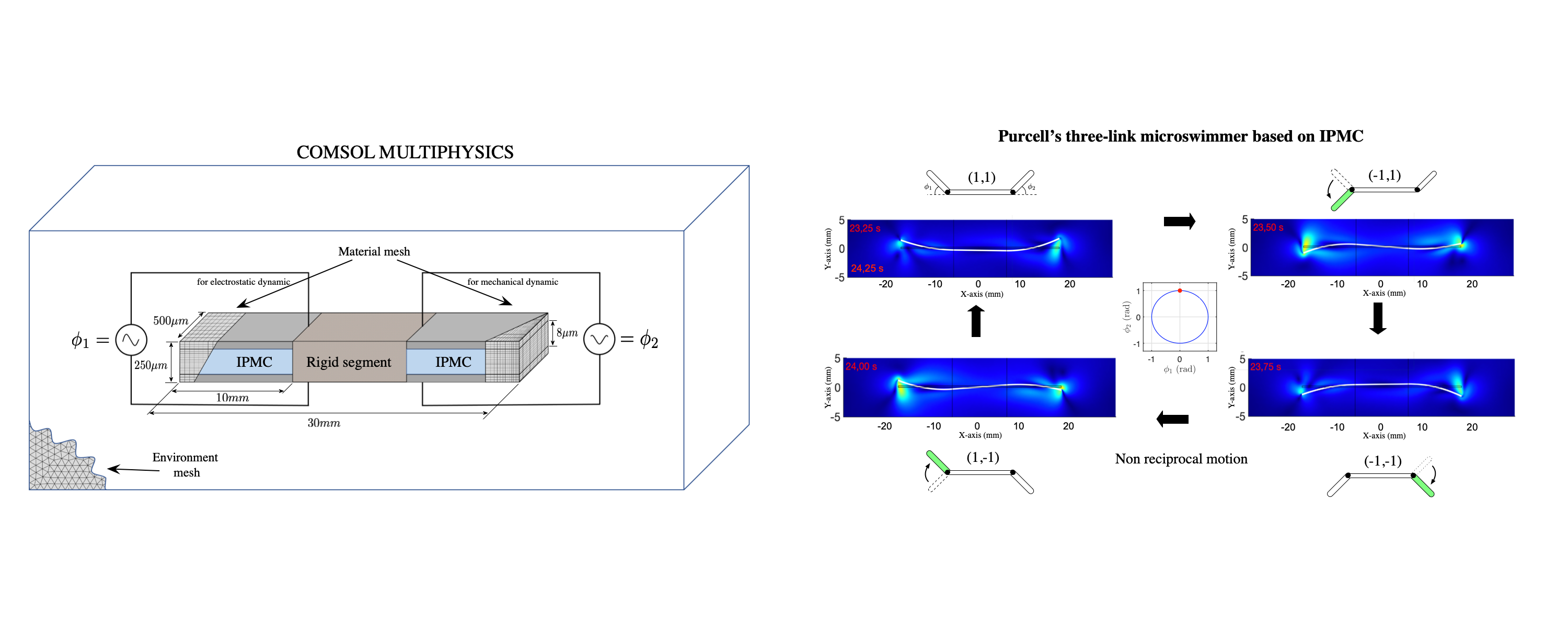
One of the few possible mechanisms for self-propulsion at low Reynolds number (henceforth, $Re$) is undulations of an elastic tail, as proposed in the classical work of Purcell in 1977. This paper studies this effect by investigating a variant of Purcell’s three-link swimmer model where the lateral links are flexible, specifically fabricated by ionic polymer metal composite (IPMC), by means of simulations in COMSOL Multiphysics. Firstly, a model of the material is developed in COMSOL and simulated in comparison with results that can be found in the literature. The proposed model presents some benefits against other existing models: 1) it allows actuator displacement, so it can be integrated in the model of a mobile robot; 2) it satisfies Euler-Bernoulli theorem; and 3) it incorporates the interaction of the actuator with a fluid in which the robot is immersed. Based on this model, a Purcell's three-link microswimmer is built whose lateral links are of IPMC within a fluid under low Re conditions. The displacement of the robot is analyzed for one of the classical primitives of motion, namely, the circular primitive. The results demonstrate that the swimmer is able to perform a non-reciprocal motion and, consequently, propel itself within the fluid.
Downloads
References
J. Happel and H. Brenner, Low Reynolds number hydrodynamics. Martinus Nijhoff Publishers, 2 ed., 1983.
E. M. Purcell, “Life at low Reynolds number,” American Journal of Physics, vol. 45, no. 1, pp. 3–11, 1977.
F. Alouges, A. DeSimone, L. Giraldi, and M. Zoppello, “Self-propulsion of slender micro-swimmers by curvature control: N-link swimmers,” International Journal of Non-Linear Mechanics, vol. 56, pp. 132–141, 2013.
S. Kadam and R. Banavar, “Geometry of locomotion of the generalized Purcell’s swimmer: Modelling, controllability and motion primitives,” IFAC Journal of Systems and Control, vol. 4, pp. 7–16, 2018.
C. Nuevo-Gallardo, J. E. Traver, I. Tejado, and B. M. Vinagre, “Purcell’s Three-Link Swimmer: Assessment of Geometry and Gaits for Optimal Displacement and Efficiency,” Mathematics, vol. 9, no. 10, p. 1088, 2021.
L. Giraldi, P. Martinon, and M. Zoppello, “Controllability and optimal strokes for N-link microswimmer,” Proceedings of the 52nd IEEE Conference on Decision and Control, pp. 3870–3875, 2013.
O. Wiezel and Y. Or, “Using optimal control to obtain maximum displacement gait for Purcell’s three-link swimmer,” Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), pp. 4463–
, 2016.
S. Kadam, K. Joshi, N. Gupta, P. Katdare, and R. N. Banavar, “Trajectory tracking using motion primitives for the Purcell’s swimmer,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3246–3251, 2017.
F. Alouges, A. DeSimone, L. Giraldi, Y. Or, and O. Wiezel, “Energy-optimal strokes for multi-link microswimmers: Purcell's loops and Taylor's waves reconciled,” New Journal of Physics, vol. 21, no. 4, p. 043050, 2019.
E. Gutman and Y. Or, “Symmetries and gaits for Purcell’s three-link microswimmer model,” IEEE Transactions on Robotics, vol. 32, no. 1, pp. 53–69, 2016.
D. Tam and A. E. Hosoi, “Optimal stroke patterns for Purcell’s three-link swimmer,” Physical Review Letters, vol. 98, no. 6, p. 068105, 2007.
F. Alouges, A. DeSimone, L. Giraldi, and M. Zoppello, “Purcell magneto-elastic swimmer controlled by an external magnetic field,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 4120–4125, 2017.
D. Du, E. Hilou, and S. L. Biswal, “Reconfigurable paramagnetic microswimmers: Brownian motion affects non-reciprocal actuation,” Soft Matter, vol. 14, pp. 3463–3470, 2018.
J. Grover, D. Vedova, N. Jain, M. Travers, and H. Choset, “Motion planning, design optimization and fabrication of ferromagnetic swimmers,” in Proceedings of Robotics: Science and Systems (RSS’19), pp. 79–87, 2019.
C. Moreau, “Local controllability of a magnetized Purcell’s swimmer,” IEEE Control Systems Letters, vol. 3, no. 3, pp. 637–642, 2019.
E. Passov and Y. Or, “Dynamics of Purcell’s three-link microswimmer with a passive elastic tail,” The European Physical Journal E, vol. 35, no. 8, pp. 1–9, 2012.
Z. Chen, H. Bart-Smith, and X. Tan, “IPMC-actuated robotic fish,” in Robot Fish, pp. 219–253, Springer, 2015.
M. Shahinpoor and K. J. Kim, “Ionic polymer metal composites: IV Industrial and medical applications,” Smart Materials and Structures, vol. 14, no. 1, pp. 197–214, 2004.
S. Nemat-Nasser, “Micromechanics of actuation of ionic polymer-metal composites,” Journal of Applied Physics, vol. 92, no. 5, pp. 2899–2915, 2002.
D. Pugal, Physics Based Model of Ionic Polymer Metal Composite Electromechanical and Mechanoelectrical Transduction. PhD thesis, University of Nevada, USA, 2012.
M. Shahinpoor, Ionic Polymer Metal Composites (IPMCs): Smart Multi- Functional Materials and Artificial Muscles, Volume 2. Royal Society of Chemistry, 2015.
L. Boerefijn, “IPMC actuator for swimming microrobots,” Master’s Thesis, Delft University of Technology, Netherlands, 2017.
R. Caponetto, V. De Luca, and S. Graziani, “A multiphysics model of IPMC actuators dependence on relative humidity,” in Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), pp. 1482–1487, 2015.
S. Nemat-Nasser and J. Y. Li, “Electromechanical response of ionic polymer-metal composites,” Journal of Applied Physics, vol. 87, no. 7, pp. 3321–3331, 2000.
L. E. Becker, S. A. Koehler, and H. A. Stone, “On self-propulsion of micro-machines at low Reynolds number: Purcell’s three-link swimmer,” Journal of Fluid Mechanics, vol. 490, pp. 15–35, 2003.
E. Lauga and T. R. Powers, “The hydrodynamics of swimming microorganisms,” Reports on Progress in Physics, vol. 72, no. 9, p. 096601, 2009.
O. Wiezel and Y. Or, “Optimization and small-amplitude analysis of Purcell’s three-link microswimmer model,” Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, vol. 472, no. 2192, pp. 4–25, 2016.