Simulation Tool for Hybrid AGVs based on IEC-61131
Keywords:
AGV, IEC-61131, PLC, fine-tuningAbstract
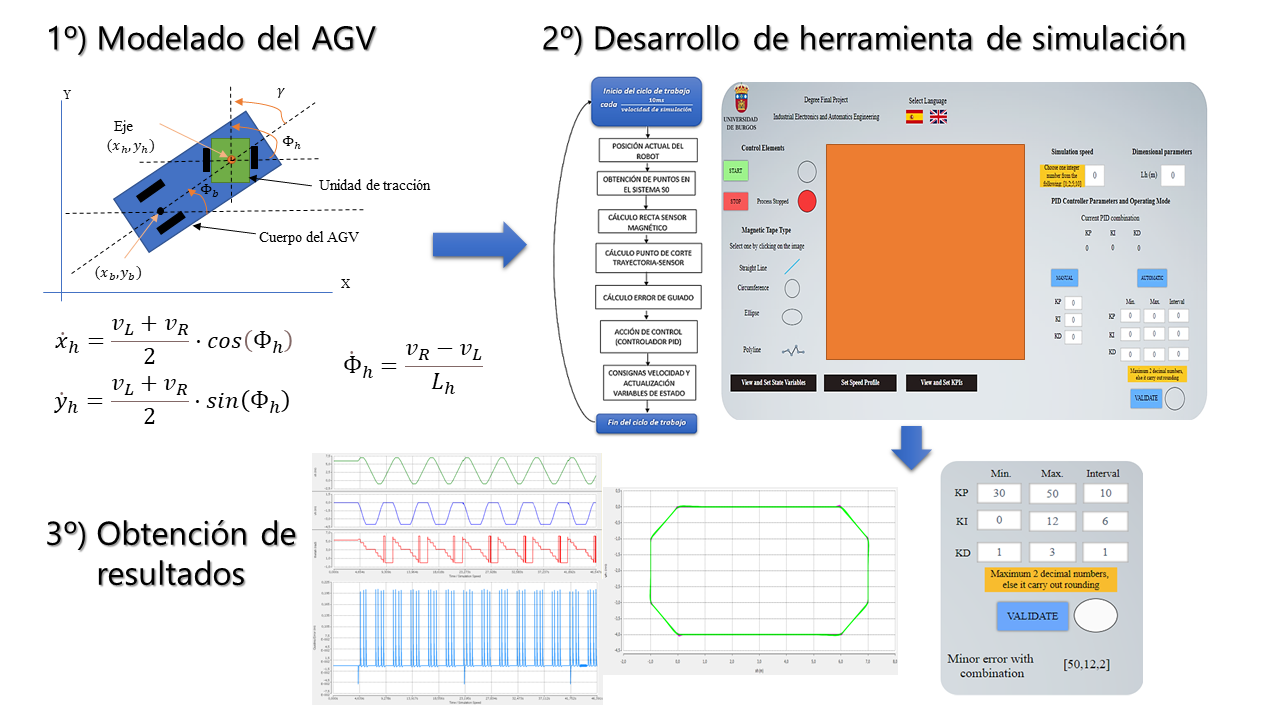
AGVs or automatic guided vehicles are unmanned battery-powered trucks used to transport loads in logistics and production. They are equipped with a controller, normally an industrial programmable logic controller (PLC), that processes the information of the guiding sensor and computes the signals to control the motors with the aim of following the desired trajectory. The tracking error, the traveled distance, and the time to execute a task depend on the parameters of the controller. Indeed, parameters that work in a circuit may not work in a different one. Thus, the fine-tuning of the controller is a key factor. In order to improve this process, in this work, an IEC61131-based simulation tool has been developed to evaluate the performance of the controller with different trajectories and search the configuration that provides the minimum guide error. The tool can run on a computer or on the AGV’s PLC. The simulation tool can execute the same code that is running in the AGV
Downloads
References
P. Moubarak, and P. Ben-Tzvi, “Modular and reconfigurable mobile robotics,” Robotics and Autonomous Systems, vol. 60, no. 12, pp. 1648-1663, 2012.
F. Espinosa, C. Santos, and J.E. Sierra-García, “Transporte multi-AGV de una carga: estado del arte y propuesta centralizada,” Revista Iberoamericana de Automática e Informática industrial, vol. 18, no. 1, pp. 82-91, 2021.
Programmable controllers, IEC-61131, 2013. [Online]. Available: https://webstore.iec.ch/publication/4552
W.L. Maxwell and J.A. Muckstadt, "Design of automatic guided vehicle systems," IIE Transactions, pp. 114-124, 1982.
J. Veiga,, et al. “Modeling of Dynamic Behavior of AGV systems,” in 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 2019, pp. 1307-1312.
M. Bonilla, F. Reyes, and M. Mendoza, “Modelling and simulation of a wheeled mobile robot in configuration classical tricycle,”. In Proceedings of 5th WSEASA International Conference on Instrumentation, Measurement, Control, Circuits and Systems, Cancún, México, 2005.
Aguirre, J. A., Gutieīrrez-Frīıas, O., & Sossa-Azuela, H. (2021). Optimization of a Passive Parallelogram Suspension System for a Planetary Rover Using Differential Evolution. IEEE Latin America Transactions, 19(8), 1366-1374.
J. Villagra, and D. Herrero-Pérez, “A comparison of control techniques for robust docking maneuvers of an AGV,” IEEE Transactions on Control Systems Technology, vol. 20, no. 4, pp. 1116-1123, 2011.
Y. Han, Y. Cheng, and G. Xu, “Trajectory tracking control of AGV based on sliding mode control with the improved reaching law,” IEEE Access, vol. 7, pp. 20748-20755, 2019.
D. Aligia, G. Magallán, and C. De Angelo, “Traction control of an electric vehicle based on nonlinear observers,” Revista Iberoamericana de Automática e Informática industrial, vol. 15, no. 1, pp. 112-123, 2017.
J.E. Sierra-García, and M. Santos, “Mechatronic Modelling of Industrial AGVs: A Complex System Architecture,” Complexity, vol. 2020, Article ID 6687816, 2020.
J.E. Sierra García, and M. Santos, “Influencia de la latencia en el control de AGVS a través de redes 5G,” In XL Jornadas de Automática, La Coruña, Spain, Universidade da Coruña, Servizo de Publicacións, pp. 611-616, 2019.
H. Durrant-Whyte, D. Rye, and E. Nebot, “Localization of autonomous guided vehicles,” In Robotics Research, Springer, London, pp. 613-625, 1996.
J. Biswas, and M. Veloso, “Depth camera based indoor mobile robot localization and navigation,” In 2012 IEEE International Conference on Robotics and Automation, Minnesota, USA, 2012, pp. 1697-1702.
F. Espinosa Zapata, J. Lázaro Galilea, and J. Olivares Bueno, “Contributions to Optimizing Remote Robot Guidance in Intelligent Spaces,” Revista Iberoamericana de Automática e Informática industrial, vol. 15, no. 4, pp. 416-426, 2018.
J.S. Almeida et al, “Localization system for autonomous mobile robots using machine learning methods and omnidirectional sonar,” IEEE Latin America Transactions, vol. 16, no. 2, 872, pp. 368-374, 2018.
J. Wang, R. Tai, and J. Xu, “A Bi-Level Probabilistic Path Planning Algorithm for Multiple Robots with Motion Uncertainty, ” Complexity, vol. 2020, Article ID 9207324, 2020.
S. Ito et al, “Quality Index of Supervised Data for Convolutional Neural Network-Based Localization,” Applied Sciences, vol. 9, no. 10, 2019.
Sanchez, R., Sierra-García, J. E., & Santos, M. (2021). Modelado de un AGV híbrido triciclo-diferencial. Revista Iberoamericana de Automática e Informática industrial.
Peralta, R. M., Gómez, E. Z., & Azuela, J. H. S. (2019). Efficient FPGA hardware implementation for robot manipulator kinematic modeling using rational trigonometry. IEEE Latin America Transactions, 17(09), 1524-1536
G. Oriolo, “Control of Nonholonomic Systems,” University of Rome, 1995. [Online]. Available: https://www.dis.uniroma1.it/~oriolo/cns/cns_slides.pdf
A. Barrientos, L.F. Peñín, C. Balaguer and R. Aracil, “Fundamentos de Robótica,” 2nd ed, McGraw-Hill, pp. 49-92, 2007.
Beckhoff Automation Twincat 3 Software, 2021. [Online]. Available: https://www.beckhoff.com/media/downloads/information-media/beckhoff_twincat3_e.pdf