Trajectory Planning For Car-like Robots Through Curve Parametrization And Genetic Algorithm Optimization With Applications To Autonomous Parking
Keywords:
Car-like mobile robots, Trajectory generation, Parallel parking, Genetic algorithmAbstract
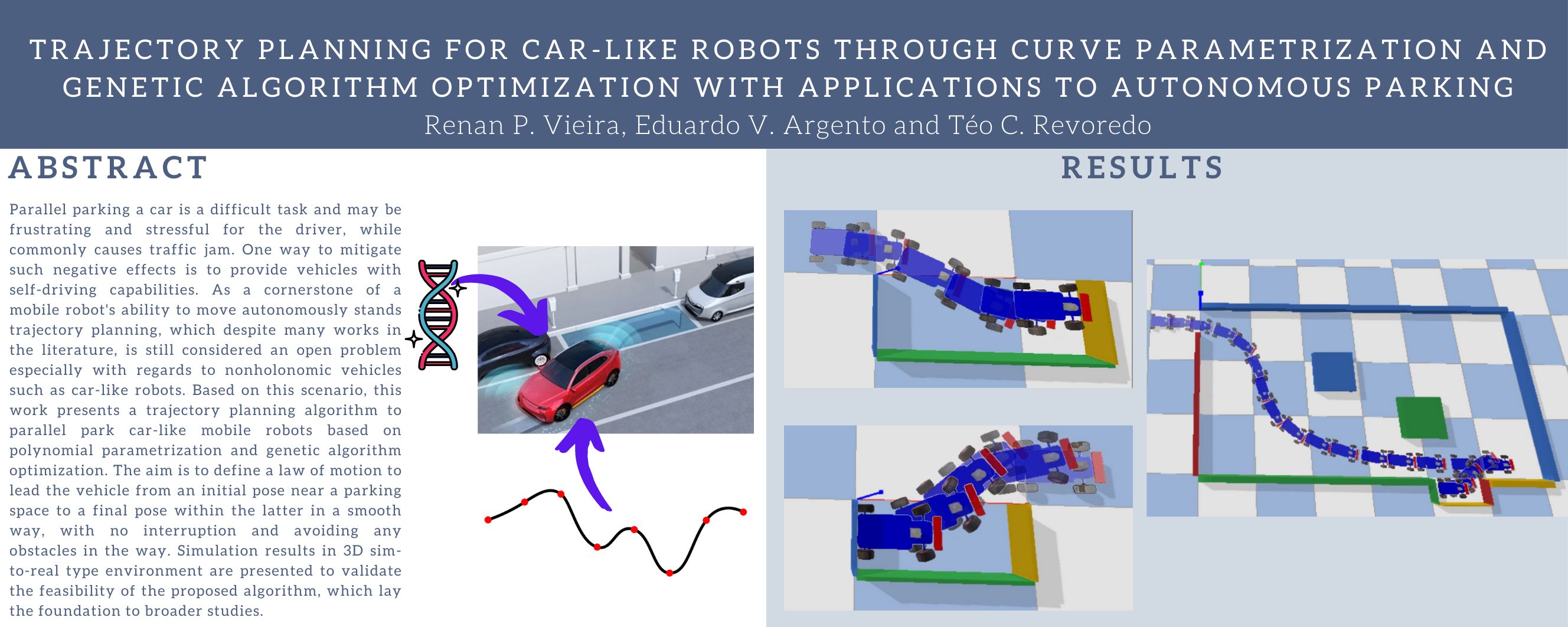
Parallel parking a car is a difficult task and may be frustrating and stressful for the driver, while commonly causes traffic jam. One way to mitigate such negative effects is to provide vehicles with self-driving capabilities. As a cornerstone of a mobile robot's ability to move autonomously stands trajectory planning, which despite many works in the literature, is still considered an open problem especially with regards to nonholonomic vehicles such as car-like robots. Based on this scenario, this work presents a trajectory planning algorithm to parallel park car-like mobile robots based on polynomial parametrization and genetic algorithm optimization. The aim is to define a law of motion to lead the vehicle from an initial pose near a parking space to a final pose within the latter in a smooth way, with no interruption and avoiding any obstacles in the way. Simulation results validate the feasibility of the proposed algorithm which lays the foundation to broader studies.
Downloads
References
M. M. Rashid, M. M. Rahman, M. R. Islam, O. N. Alwahedy, and A. Abdullahi, “Autonomous 4wd smart car parallel self-parking system by using fuzzy logic controller,” American International Journal of Sciences and Engineering Research, vol. 2, no. 2, pp. 1–31, 2019.
D. C. Conner, H. Kress-Gazit, H. Choset, A. A. Rizzi, and G. J. Pappas, “Valet parking without a valet,” in 2007 IEEE/RSJ international conference on intelligent robots and systems, pp. 572–577, IEEE, 2007.
B. Li and Z. Shao, “Simultaneous dynamic optimization: A trajectory planning method for nonholonomic car-like robots,” Advances in Engineering Software, 09 2015.
N. A. Martins, E. S. Elyoussef, D. W. Bertol, E. R. De Pieri, U. F. Moreno, and E. d. B. Castelan, “Trajectory tracking of a nonholonomic mobile robot with kinematic disturbances: A variable structure control design,” IEEE Latin America Transactions, vol. 9, no. 3, pp. 276–283, 2011.
D. Perez Morales, O. Kermorgant, S. Dominguez Quijada, and P. Martinet, “Laser-based control law for autonomous parallel and perpendicular parking,” in 2018 Second IEEE International Conference on Robotic Computing (IRC), pp. 64–71, 2018.
X. Zhang, A. Liniger, A. Sakai, and F. Borrelli, “Autonomous parking using optimization-based collision avoidance,” in 2018 IEEE Conference on Decision and Control (CDC), pp. 4327–4332, 2018.
S. Upadhyay and A. Ratnoo, “A point-to-ray framework for generating smooth parallel parking maneuvers,” IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 1268–1275, 2018.
J. Song, W. Zhang, X. Wu, H. Cao, Q. Gao, and S. Luo, “Laserbased SLAM automatic parallel parking path planning and tracking for passenger vehicle,” IET Intelligent Transport Systems, vol. 13, pp. 1557–1568, July 2019.
M. Ye, X. Ji, and Y. Zhao, “A trajectory planning method based on b-spline algorithm for automatic parking systems,” in Proceedings of the 3rd International Conference on Computer Engineering, Information Science And Application Technology (ICCIA 2019), Atlantis Press, 2019.
N. Nakrani and M. Joshi, “An intelligent fuzzy based hybrid approach for parallel parking in dynamic environment,” Procedia Computer Science, vol. 133, pp. 82–91, 2018.
E. Ballinas, O. Montiel, O. Castillo, Y. Rubio, and L. T. Aguilar, “Automatic parallel parking algorithm for a carlike robot using fuzzy pd+ i control.,” Engineering Letters, vol. 26, no. 4, 2018.
D. Kim, W. Chung, and S. Park, “Practical motion planning for carparking control in narrow environment,” IET Control Theory And Applications, vol. 4, pp. 129–139, Jan. 2010
K. Demirli and M. Khoshnejad, “Autonomous parallel parking of a carlike mobile robot by a neuro-fuzzy sensor-based controller,” Fuzzy Sets and Systems, vol. 160, pp. 2876–2891, Oct. 2009.
D. Wang, H. Liang, T. Mei, and H. Zhu, “Research on self-parking path planning algorithms,” in Proceedings of 2011 IEEE International Conference on Vehicular Electronics and Safety, IEEE, July 2011.
K. Erkorkmaz and Y. Altintas, “High speed CNC system design. part i: jerk limited trajectory generation and quintic spline interpolation,”nternational Journal of Machine Tools and Manufacture, vol. 41, pp. 1323–1345, July 2001.
A. Tuncer and M. Yildirim, “Dynamic path planning of mobile robots with improved genetic algorithm,” Computers And Electrical Engineering, vol. 38, no. 6, pp. 1564–1572, 2012.
J. Tu and S. X. Yang, “Genetic algorithm based path planning for a mobile robot,” in 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), vol. 1, pp. 1221–1226, IEEE, 2003.
S. Ni, Z. Liu, Y. Cai, and X. Wang, “Modelling of ship’s trajectory planning in collision situations by hybrid genetic algorithm,” Polish Maritime Research, vol. 25, pp. 14–25, Sept. 2018.
O.-R. A. D. O. Committee, “Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles.” https://www.sae.org/standards/content/j3016_202104/, 2021. [Online; accessed 24-May-2021].
C. Zhu and R. Rajamani, “Global positioning system-based vehicle control for automated parking,” I MECH E Part D Journal of Automobile Engineering, vol. 220, no. 1, pp. 37–52, 2006.
B. C. Pinheiro, “Sistema de controle tempo real embarcado para automação de manobra de estacionamento,” Dissertação de Mestrado em Automação e Sistemas ,Universidade Federal de Santa Catarina, 2009.
C. M. Filho and D. F. Wolf, “Dynamic inversion-based control for front wheel drive autonomous ground vehicles near the limits of handling,” in 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), IEEE, Oct. 2014.
T. C. Revoredo, F. Mora-Camino, and J. Slama, “A two-step approach for the prediction of dynamic aircraft noise impact,” Aerospace Science and Technology, vol. 59, pp. 122–131, 2016.
J. Reimpell, H. Stoll, and J. Betzler, The automotive chassis: engineering principles. Elsevier, 2 ed., 2001.
P. Simionescu and M. Smith, “Initial estimates in the design of centrallever steering linkages,” J. Mech. Des., vol. 124, no. 4, pp. 646–651, 2002.
T. D. Gillespie, “Fundamentals of vehicle dynamics,” SAE International, 1992.
K. Hartani, M. Bourahla, Y. Miloud, and M. Sekour, “Electronic differential with direct torque fuzzy control for vehicle propulsion system,”Turk J Elec Eng end Comp Sci, vol. 17, no. 1, 2009.
S. Thrun, “Robotic mapping: a survey,” Exploring Artificial Intelligence in the NewMillenium, San Francisco, CA, USA: Morgan Kaufmann Publishers Inc., pp. 1–35, 2003.
E. V. Argento, R. P. Vieira, and T. C. Revoredo, “Estacionamento paralelo autônomo de veículos leves de passeio,” Anais da Sociedade Brasileira de Automática, vol. 2, no. 1, 2020.
J. Lévine, Analysis and Control of nonlinear systems: A flatness-based approach. Springer-Verlag Berlin Heidelberg, 2009.
D. Pedrosa, A. Medeiros, and P. Alsina, “Point-to-point paths generation for wheeled mobile robots,” in 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), IEEE, 2003.
R. Walambe, N. Agarwal, S. Kale, and V. Joshi, “Optimal trajectory generation for car-type mobile robot using spline interpolation∗∗this work is carried out under the research project grant sanctioned under the WOS-a scheme by department of science and technology (DST), govt. of india.,” IFAC-PapersOnLine, vol. 49, no. 1, pp. 601–606, 2016.
J. H. Holland et al., Adaptation in natural and artificial systems: an introductory analysis with applications to biology, control, and artificial intelligence. MIT press, 1992.
C. Darwin, A origem das espécies. EDITORA BIBLIOMUNDI SERVIÇOS DIGITAIS LTDA, 2020.
C. R. Houck, J. Joines, and M. G. Kay, “A genetic algorithm for function optimization: a matlab implementation,” Ncsu-ie tr, vol. 95, no. 09, pp. 1–10, 1995.
C. R. Reeves, “Genetic algorithms for the operations researcher,” INFORMS journal on computing, vol. 9, no. 3, pp. 231–250, 1997.
E. Coumans and Y. Bai, “Pybullet, a python module for physics simulation for games, robotics and machine learning,” URL http://pybullet.org, 2016.
R. Michalik and A. Janota, “The PyBullet module-based approach to control the collaborative YuMi robot,” in 2020 ELEKTRO, IEEE, May 2020.