Observer-Based PD Controller for a Class of High Order Linear Unstable Delayed Systems
Keywords:
linear systems, delay systems, stability, Fuzzy ObservabilityAbstract
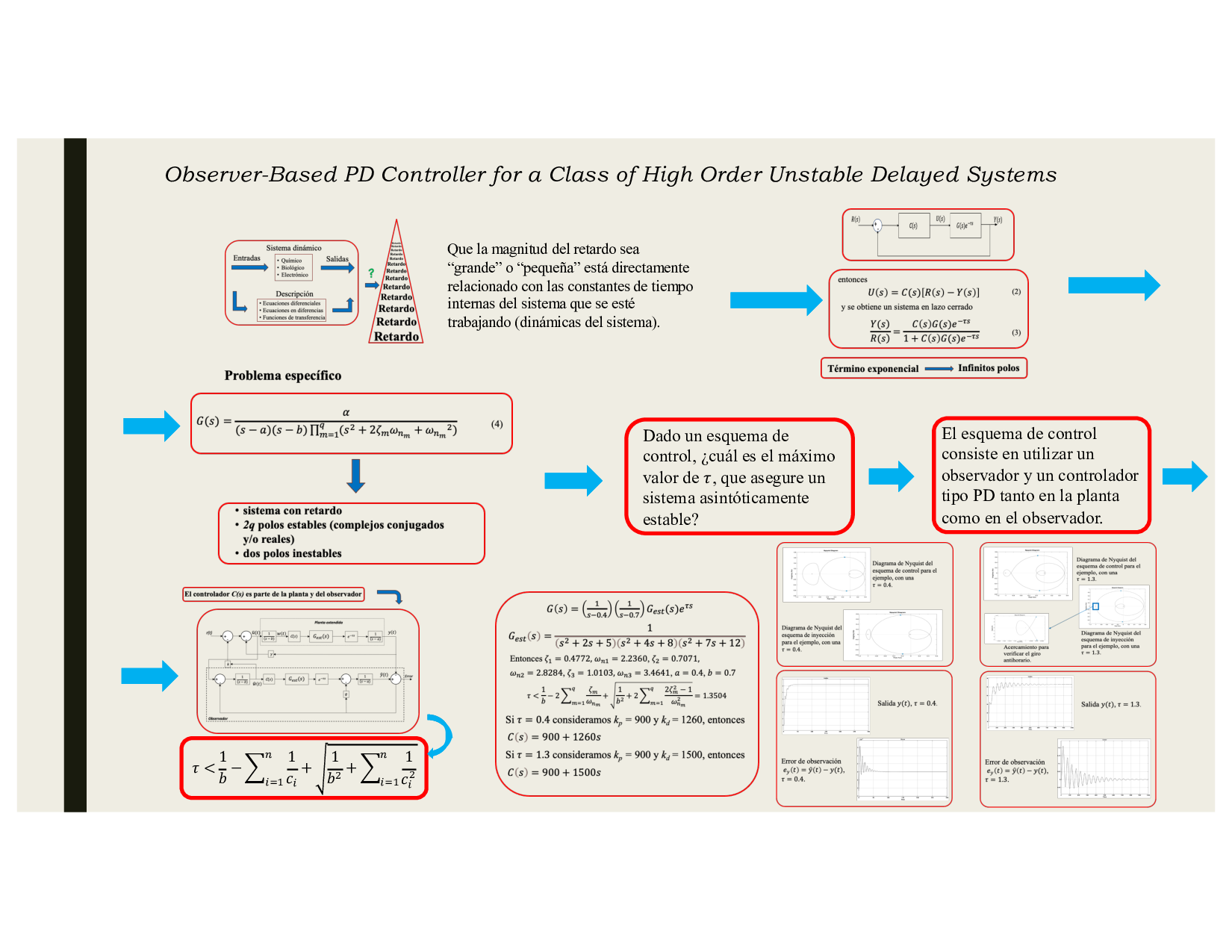
In this paper it is considered the stabilization and control of a class of high order linear systems that are subject to constant time delay at the input-output channel. In particular, systems with two unstable poles and any number of real or complex conjugate stable poles are studied. To improve the solutions existing in the literature, a new proposal for the solution of the considered problem is taken into account consisting in the design of an observer and a Proportional–Derivative PD controller to assure stable closed–loop performance, establishing by means of a frequency analysis necessary and sufficient conditions for the proposed control strategy. The proposal novelty is the inclusion of the PD control action in the observer that allows to estimate internal signals used in the solution. This configuration offers advantages in the time delay size that can be handled and on the control performance of the closed loop system. A practical design procedure is presented to determine the value of the controller gains. Numerical simulations examples are presented to show the operation of the proposal.
Downloads
References
R. Sipahi, S. J. Nicolescu, C. T. Abdallah, W. Michiels, and K. Gu, “Stability and stabilization of systems with time delay,” IEEE Control Systems Magazine, vol. 31, pp. 38–65, 2011.
J. J. Loiseau, “Algebraic tools for the control and stabilization of timedelay systems,” in IFAC Workshop on Linear Time Delay Systems, vol. 31, pp. 187–201, 1998.
G. J. Silva, A. Datta, and S. P. Bhattacharyya, PID controllers for timedelay systems. Control engineering, Boston [u.a.]: Birkhäuser, 2005.
J. F. Marquez-Rubio, B. del Muro-Cuéllar, and J. Álvarez Ramírez, “Stabilization region of PD controller for unstable first order process with time delay,” International Journal of Control, Automation, and Systems, vol. 12, no. 2, pp. 265–273, 2014.
J. F. Márquez-Rubio, B. del Muro-Cuéllar, M. Velasco-Villa, and J. Ávarez Ramírez, “Control basado en un esquema observador para sistemas de primer orden con retardo,” Revista mexicana de ingeniería química, vol. 9, pp. 43 – 52, 04 2010.
C. Xiang, Q. G. Wang, X. Lu, L. A. Nguyen, and T. H. Lee, “Stabilization of second-order unstable delay processes by simple controllers,” Journal of process control, vol. 17, pp. 675–682, 2007.
S. C. Lee, Q. G. Wang, and C. Xiang, “Stabilization of all-pole unstable delay processes by simple controllers,” Journal of process control, vol. 20, pp. 235–239, 2010.
D. F. Novella-Rodríguez, B. del Muro-Cuéllar, and O. Sename, “Observer-based scheme for the control of high order systems with two unstable poles plus time delay,” Asia Pacific Journal of Chemical Engineering, vol. 9, pp. 167–180, 2014.
D. F. Novella-Rodríguez, B. del Muro Cuéllar, J. F. Márquez-Rubio, M. A. Hernández-Pérez, and M. Velasco-Villa, “PD—PID controller for delayed systems with two unstable poles: a frequency domain approach,” International Journal of Control, vol. 92, pp. 1196–1208, 2019.
C. D. Vázquez, J. F. Márquez, B. del Muro, D. Novella, M. A. Hernandez, and G. Duchen, “Observer-PI scheme for the stabilization and control of high order delayed systems with one or two unstable poles,” in 3rd IFAC Conference on Advances in Proportional-Integral- Derivative Control PID 2018, vol. 51, pp. 432–437, 2018.
M. A. Hernández-Pérez, B. del Muro-Cuéllar, and M. Velasco-Villa, “PID for the stabilization of high-order unstable delayed systems with possible complex conjugate poles,” Asia Pacific Journal of Chemical Engineering, vol. 10, no. 5, pp. 687–699, 2015.
G. Duchen, B. D. M. B, J. F. Márquez, M. A. Hernández, E. Ramírez, and C. Cruz, “Estabilización y control de sistemas de alto orden con retardo y dos polos inestables: esquema PD-observador,” in Memorias del Congreso Nacional de Control Automático 2019, pp. 291–296, AMCA, 2019.
H. Nyquist, “Regeneration theory,” The Bell System Technical Journal, vol. 11, pp. 126–147, 1932.