Analysis of the Inverse Kinematics and Trajectory Planning Applied in a Classic Collaborative Industrial Robotic Manipulator
Keywords:
Trajectory Planning, Genetic Algorithms, Comparative Analysis, Collaborative Robotics, Artificial Neural NetworksAbstract
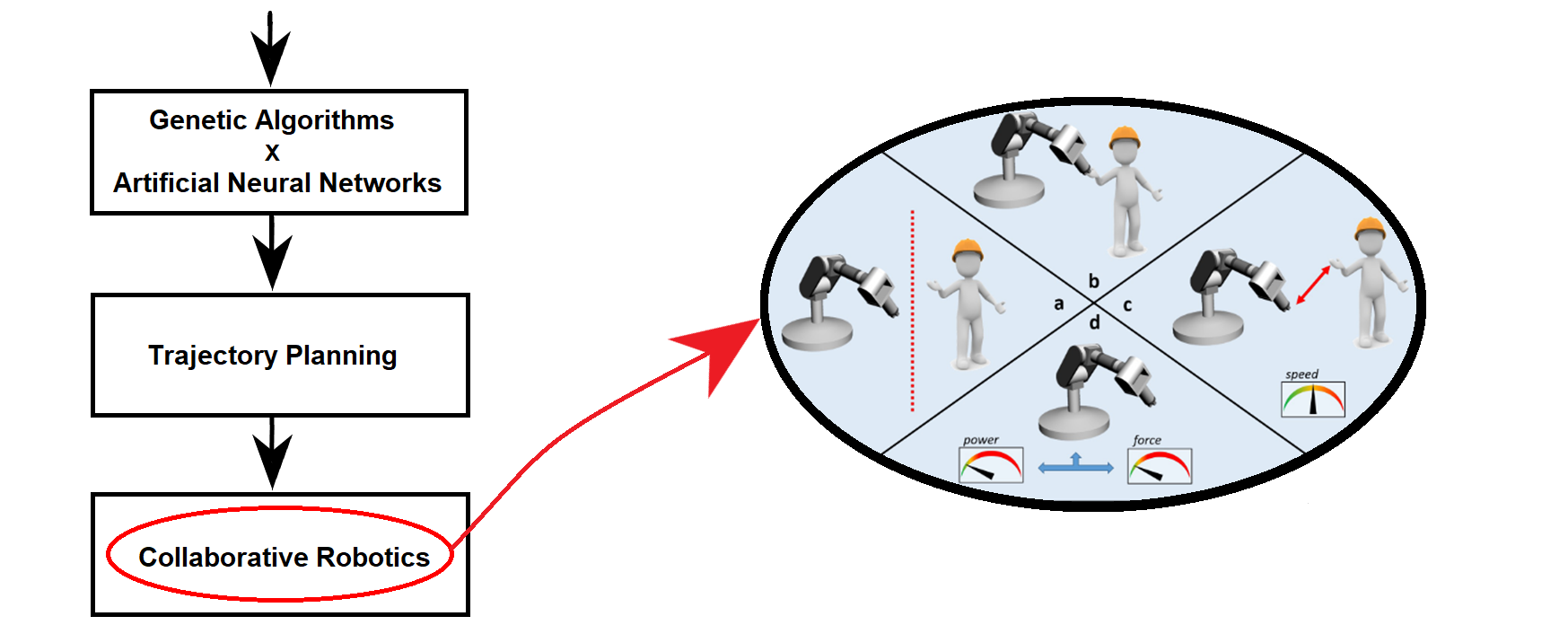
In this work, the approaches of genetic algorithms (GA) and artificial neural networks (ANN) are compared to solve the inverse kinematics applied in a robotic manipulator. The method with the best result in the comparison is then used to act in conjunction with another concept of robotics which is collaborative robotics, responsible for increasing the safety of both the manipulator and the human being when an object and/or person appears in the trajectory of the manipulator. The classic concept of inverse kinematics is related to the relatively new concept of collaborative robotics through trajectory planning, which in this work used the fifth-order polynomial due to its ability to control position, speed, and acceleration. According to the results obtained, the best method in the comparison for the solution of the inverse kinematics was that of artificial neural networks because it has the shortest response time and the most robust results.
Downloads
References
A. Zou, Z. Hou, S. Fu, and M. Tan, “Neural networks for mobile
robot navigation: A survey,” Advances in Neural Networks - ISNN 2006, vol. II, no. 1, p. 1218–1226, 2006.
V. V. Unhelkar and J. A. Shah, “Challenges in developing a collaborative robotic assistant for automotive assembly lines,” ACM/IEEE Int. Conf. Human-Robot Interact., vol. vol. 02-05-Marc, pp. 239–240, 2015.
J. Krüger, T. K. Lien, and A. Verl, “Cooperation of human and machines in assembly lines,” CIRP Ann. - Manuf. Technol., vol. 58, no. 2, pp. 628–646, 2009.
S. B. Niku, Introduction to Robotics: Analysis, Control, Applications, vol. 53. Hoboken, New Jersey, USA: John Wiley & Sons, 2 ed., 2011.
J. F. Dalmedico, M. Mendonça, L. B. d. Souza, R. V. P. D. Barros, and I. R. Chrun, “Artificial neural networks applied in the solution of the inverse kinematics problem of a 3d manipulator arm,” 2018 International Joint Conference on Neural Networks (IJCNN), pp. 1–6, 2018.
G. Bhardwaj, N. Sukavanam, R. Panwar, and R. Balasubramanian, “An unsupervised neural network approach for inverse kinematics solution of manipulator following kalman filter based trajectory,” in 2019 IEEE Conference on Information and Communication Technology, pp. 1–6, 2019.
E. Farah, “Fuzzy pid based path tracking control of a 5-dof needle holding robot,” 2017 International Conference on Communication, Control, Computing and Electronics Engineering (ICCCCEE), pp. 1–5, 2017.
S. Haykin, Neural networks and learning machines. Upper Saddle River: Pearson Prentice Hall, 3 ed., 2009.
L. Xiao and Y. Zhang, “A new performance index for the repetitive
motion of mobile manipulators,” IEEE Trans. Cybern., vol. 44, no. 2,
pp. 280–292, 2014.
L. Tian and C. Collins, “An effective robot trajectory planning method using a genetic algorithm,” Mechatronics, vol. 14, no. 5, pp. 455–470, 2004.
P. Savsani, R. L. Jhala, and V. J. Savsani, “Optimized trajectory planning of a robotic arm using teaching learning based optimization (tlbo) and artificial bee colony (abc) optimization techniques,” IEEE International Systems Conference (SysCon), pp. 381–386, 2013.
S. Chenatti, G. Previato, G. Lopes, R. Prudencio, G. Leite, T. Oliveira, G. Abreu, W. Pereira, G. Correa, V. Braga, and E. Colombini, “Deep reinforcement learning in robotics logistic task coordination,” Proc. - 15th Lat. Am. Robot. Symp. 6th Brazilian Robot. Symp. 9th Work. Robot. Educ. LARS/SBR/WRE, pp. 326–332, 2018.
X. Yu, W. He, C. Xue, B. Li, L. Cheng, and C. Yang, “Adaptive neural admittance control for collision avoidance in human-robot collaborative tasks,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 7574–7579, 2019.
A. Mandal, D. Sharma, M. Sukhwani, R. Jetley, and S. Sarkar, “Improving safety in collaborative robot tasks,” in 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), vol. 1, pp. 470–477, 2019.
M. Gautam, H. Fagerlund, B. Greicevci, F. Christophe, and J. Havula, “Collaborative robotics in construction: A test case on screwing gypsum boards on ceiling,” in 2020 5th International Conference on Green Technology and Sustainable Development (GTSD), pp. 88–93, 2020.
A. M. Zanchettin, M. Marconi, C. Ongini, R. Rossi, and P. Rocco,
“A formal control architecture for collaborative robotics applications,” in 2020 IEEE International Conference on Human-Machine Systems (ICHMS), pp. 1–4, 2020.
H. Hexmoor, Essential Principles for Autonomous Robotics: Synthesis Lectures on Artificial Intelligence and Machine Learning. San Rafael, CA, USA: Morgan & Claypool, 1 ed., 2013.
J. Hu and R. Xiong, “Contact force estimation for robot manipulator using semiparametric model and disturbance kalman filter,” IEEE Trans. Ind. Electron., vol. 65, no. 4, pp. 3365–3375, 2018.
D. Zhang and B. Wei, Adaptive Control for Robotic Manipulators.
Oshawa, ON: CRC Press, 1 ed., 2017.
B. Siciliano and O. Khatib, Springer Handbook of Robotics. Heidelberg: Springer-Verlag Berlin Heidelberg, 2 ed., 2016.
R. Gerbers, M. Mücke, F. Dietrich, and K. Dröder, “Simplifying robot tools by taking advantage of sensor integration in human collaboration robots,” Procedia CIRP, vol. 44, pp. 287–292, 2016.
J. Y. M. Wang, J. Luo and U. Walter, “Coordinated trajectory planning of dual-arm space robot using constrained particle swarm optimization,” Acta Astronaut, vol. 146, pp. 259–272, 2018.
K. W. J. Huang, P. Hu and M. Zeng, “Adaptive neuro fuzzy inference system control of active suspension system with actuator dynamics,” Mech. Mach. Theory, vol. 121, pp. 530–544, 2018.
E. J. S. Pires, “Genetic algortihms: Application to robotics,” Master’s thesis, University of Porto, Porto, Portugal, 1998. 15 IEEE LATIN AMERICA TRANSACTIONS , Vol. 12, No. 12, Oct 2021
J. H. Holland, Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control and Artificial Intelligence. Cambridge, USA: MIT Press, 1 ed., 1992.
D. E. Goldberg, Genetic Algorithms in Search, Optimization, and
Machine Learning. Boston, MA: Addison-Wesley Longman Publishing
Co., Inc., 1 ed., 1989.
W. P. W. Stach, L. Kurgan and M. Reformat, “Genetic learning of fuzzy cognitive maps,” Fuzzy Sets Syst., vol. 153, no. 3, pp. 371–401, 2005.
O. Kramer, Genetic Algorithm Essentials. Cham, Switzerland: Springer, 1 ed., 2017.
E. Y. Veslin, M. S. Dutra, O. Lengerke, E. A. Carreño, and M. J. M.
Tavera, “A hybrid solution for the inverse kinematic on a seven dof
robotic manipulator,” IEEE Latin America Transactions, vol. 12, no. 2,
pp. 2012–2018, 2014.
I. N. da Silva, D. H. Spatti, R. A. Flauzino, L. H. B. Liboni, and S. F. R. Alvez, Artificial neural networks: a practical curse. Cham, Switzerland: Springer International Publishing, 1 ed., 2017.
H. S. Lopes, L. C. de A. Rodrigues, and M. T. A. Steiner, Meta-Heurísticas em Pesquisa Operational. Curitiba, PR, Brazil: Ominpax Editora, 1 ed., 2013.
B. Navarro, A. Cherubin, A. Fonte, R. Passama, G. Poisson, and
P. Fraisse, “An iso10218-compliant adaptive damping controller for safe physical human-robot interaction,” 2016 IEEE International Conference on Robotics and Automation (ICRA), pp. 3043–3048, 2016.
M. J. Rosenstrauch and J. Kruger, “Safe human-robot-collaboration-introduction and experiment using iso/ts 15066,” 2017 3rd International Conference on Control, Automation and Robotics, ICCAR 2017, pp. 740–744, 2017.