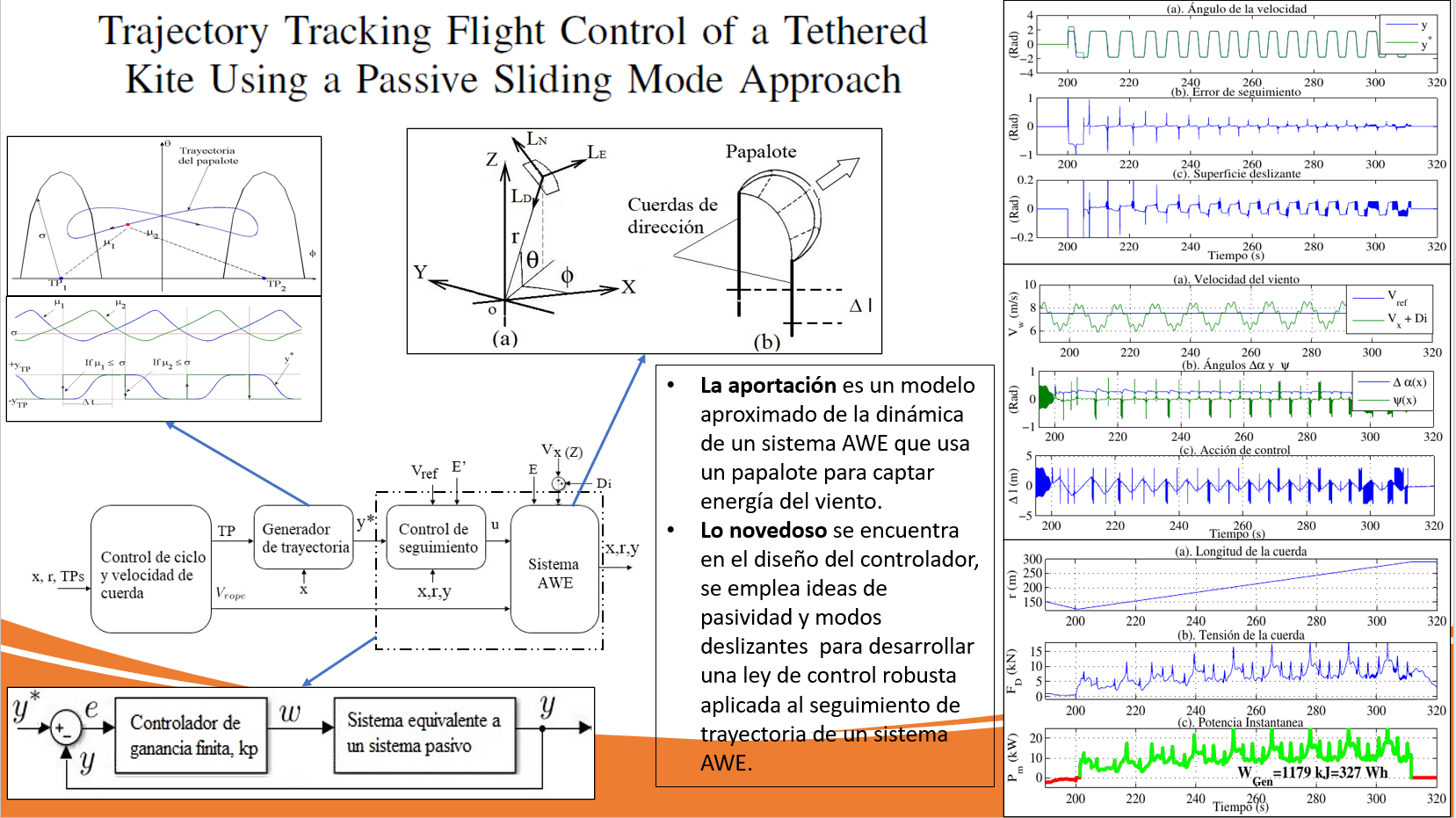
Trajectory Tracking Flight Control of a Tethered Kite Using a Passive Sliding Mode Approach
Keywords:
Wind energy, tethered kite, power generation, Robust ControlAbstract
Airborne Wind Energy (AWE) systems take advantage of high altitude wind in order to generate electrical energy. One of the challenges when harvesting energy with an AWE system is to deal with strong disturbances such as changes in the wind velocity. This paper proposes a robust trajectory tracking controller for an AWE system, namely a tethered kite, when it operates in the energy generation phase. The controller design is based on an approximate model of the kite and makes use of feedback passivation together with sliding mode techniques. The trajectory tracking error of the closed loop system in the presence of parameter variations and external disturbances is formally studied using Lyapunov stability theory. The performance of the controller is verified trough numerical simulations using a complete model of the kite.
Downloads
References
M. De Lellis, A. K. Mendonga, R. Saraiva, A. Trofino, and A. Lezana. "``Electric Power Generation in Wind Farms with Pumping Kites: An economical analysis. Renewable Energy, vol. 86, pp. 163-172, 2016.
U. Ahrens, M. Diehl, and R. Schmehl, Eds., "Airborne wind energy, green energy and technology". Berlin, Heidelberg: Springer, ISBN 978-3-642-39964-0, 2013.
Airborne Wind Energy System Modeling, Control and Optimization, [Online], Available: http://www.awesco.eu/
L. Barros, N. de Souza, W. Vianna, ``"Generation of Wind Energy with Kites: a Review of the Airborne Wind Energy Technology''. En proc. "2020 IEEE PES Transmission and Distribution Conference and Exhibition". Latin America (T&D LA), 2020.
L. Fagiano, M. Milanese, D. Piga, "High-Altitude Wind Power Generation''. IEEE Transactions on energy conversion, vol. 25, no. 1, pp. 168-180, 2010.
U. Fechner, R. van der Vlugt, E. Schreuder, R. Schmehl. ``"Dynamic Model of a Pumping Kite Power System", Renewable Energy, vol 83, pp. 705-7016, 2015.
E. Malz, F. Hedenus, L. Göransson, V. Verendel, S. Gros. "Drag-mode airborne wind energy vs. wind turbines: An analysis of power production, variability and geography". Energy. Vol. 193, 2020.
L. Fagiano, A. Zgraggen, M. Morari, and M. Khammash, `"Automatic crosswind flight of tethered wings for airborne wind energy: Modeling, control design, and experimental results", IEEE Transactions on Control Systems Technology, vol. 22, no. 4, pp. 1433-1447, 2014.
M. Erhard, H. Strauch, ``"Control of Towing Kites for Seagoing Vessels", IEEE Transactions on Control Systems Technology, vol. 21, no. 5, pp. 1629-1640, 2013.
C. Jehle, R. Schmehl, "Tracking Control on the Unit Sphere Applied to Traction Kites for Power Generation", AIAA Journal Guidance, Control and Dynamics, vol. 37, no. 4, pp. 1211-1222, 2014.
S. Costello, G. Francois, D. Bonvin, ``"Real-Time Optimizing Control of an Experimental Crosswind Power Kite", IEEE Transactions on control systems technology, vol. 26, no. 2, pp. 507-522, 2018.
M. Erhard and H. Strauch. "Flight control of tethered kites in autonomous pumping cycles for airborne wind energy", Control Engineering Practice, vol. 40, pp. 13-26, 2015.
B. Salman, M. Umer. "Sliding mode control for autonomous flight of tethered kite under varying wind speed conditions". En Proc. "2020 17th International Bhurban Conference on Applied Sciences and Technology". Islamaba, Pakistan, Juanary, 2020.
J. Alvarez-Gallegos, R. Castro-Linares, M.A. Zempoalteca-Jimenez. `"Robust Nonlinear flight Control of a Power-Generating tethered kite". En Proc. "2019 16th International Conference on Electrical Engineering, Computing Science and Automatic Control", CDMX, Mexico, Sep. 2019.
T. Dief, U. Fechner, R. Schmehl, S. Yoshida and M. Rusdi. ``"Adaptive Flight Path Control of Airborne Wind Energy Systems". Energies, vol. 13, no. 3, 2020
J. Lago, M. Erhard, M. Diehl. "Warping model predictive control for application in control of a real airborne wind energy system". Control Engineering Practice, vol. 78, pp. 65-78, 2018.
T. Aoki and T. Tsuchiya. "Multiple Trajectories Generation to Realize Stable Flight of Kites in Airborne Wind Energy System". 2020 59th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE)", Chiang Mai, Thailand, September 2020.
L. Fagiano. M. Milanese. D. Piga "Optimization of airborne wind energy generators", International Journal of Robust and nonlinear control", vol. 22, no. 18, pp.2055-2083, 2012.
Alberto Isidori, "Nonlinear Control Systems", Third Edition. Springer-Verlag, London. (1995). ISBN 978-1-4471-3909-6
H. K. Khalil, "Nonlinear Systems", Third Edition. Prentice Hall, Upper Saddle River, New Jersey. (2002). ISBN 0130673897
Christopher I. Byrnes. Alberto Isidori. Jan C. Willems. `"Passivity, feedback equivalence, and the global stabilization of minimum phase nonlinear systems", IEEE Transactions on automatic control, vol. 36, no. 11, pp. 1228-1240, 1991.
R. Sepulchre, M. Jankovic, P.V. Kokotovic, ``"Constructive nonlinear control". Springer-Verlag. ISBN:3540761276, (1997).
M. Vidyasagar, ``"Input-Output Analysis of Large-Scale Interconnected Systems", Springer-Verlag, Berlin. (1985).
Jean-Jacques E. Slotine and Weiping Li, "Applied Nonlinear Control". Prentice Hall, Englewood Cliffs, New Jersey. (1991).
B. Houska, M. Diehl, `"Optimal control for power generating kites", En proc. "European Control Conference (ECC)", Kos, Greece, 2007.
E. Hakan, N. Olgac, ``"Robust Output Tracking Control of Nonlinear MIMO Systems via Sliding Mode Technique". Automatica, vol. 28, no. 1, pp. 145-151, 1992.