Output Feedback T-S Fuzzy RMPC Applied to 3SSC Boost Converter
Keywords:
Anti-Windup, FMPC, Fuzzy Control, LMIs Optimization, Boost ConverterAbstract
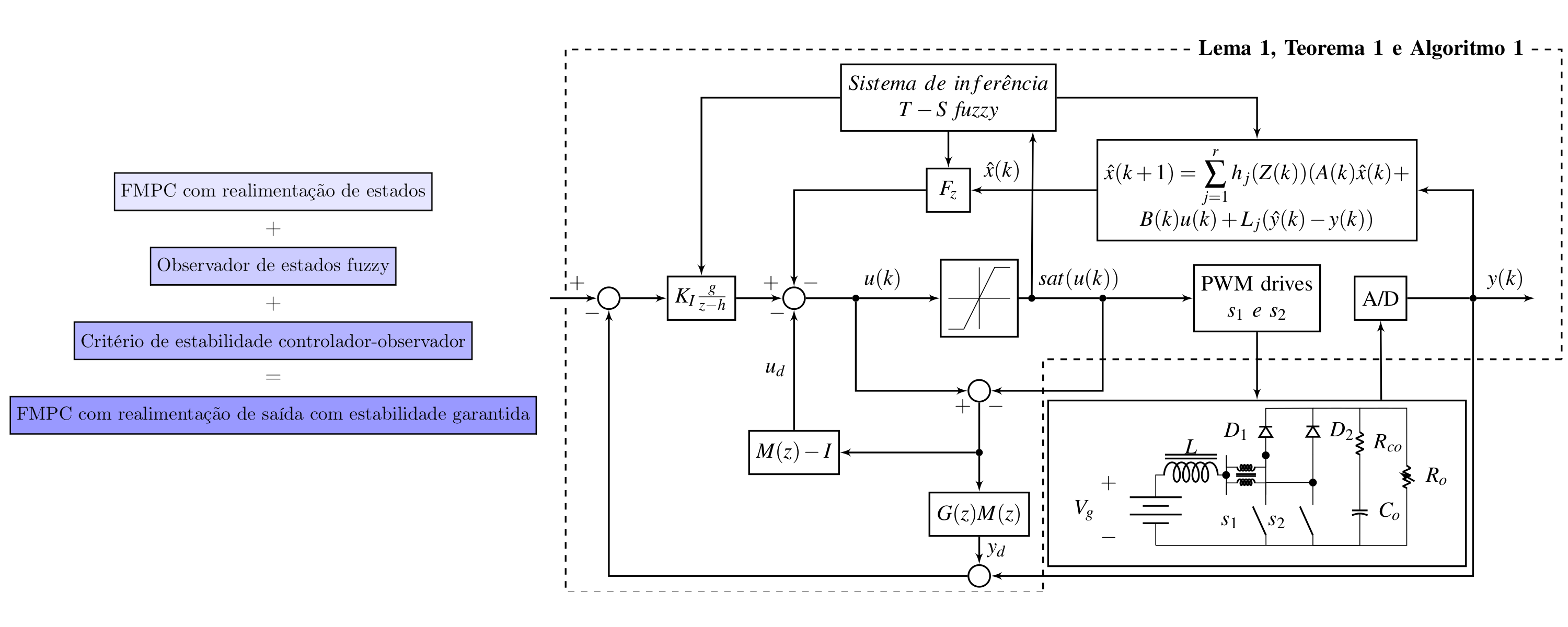
This article proposes a controller using Fuzzy Model Predictive Control (FMPC) and a fuzzy state observer applied to a three states switching cell (3SSC) boost converter. The proposed approach is an observer-based output feedback fuzzy MPC, which combines a state feedback FMPC controller with a fuzzy state observer. Moreover, a stability criterion is developed for the controller-observer procedure, considering a Takagi-Sugeno (T-S) fuzzy model, a PDC fuzzy control law, a fuzzy state observer and a state feedback FMPC, through the Linear Matrix Inequalities (LMI) optimization procedure. Furthermore, an Anti-Windup (AW) procedure is added to the control scheme. The proposed procedure is implemented for a boost converter through computer simulation, and the obtained results are compared with two MPC controllers. The analysis is done considering the time response and some performance indexes, moreover, the robust stability for the studied controller is explicit using stability ellipsoids.
Downloads
References
R. C. B. Rego and M. V. S. Costa, “Output feedback robust control withanti-windup applied to the 3ssc boost converter,”IEEE Latin AmericaTransactions, vol. 18, no. 05, pp. 874–880, 2020.
S. Vazquez, J. Rodriguez, M. Rivera, L. G. Franquelo, andM. No-rambuena, “Model predictive control for power converters and drives:Advances and trends,”IEEE Transactions on Industrial Electronics,vol. 64, no. 2, pp. 935–947, 2016.
E. F. Camacho and C. Bordons,Model Predictive Control. London:Springer, 2007.
M. V. Kothare, V. Balakrishnan, and M. Morari, “Robust constrainedmodel predictive control using linear matrix inequalities,”Automatica,vol. 32, no. 10, pp. 1361–1379, 1996.
M. C. Oliveira, E. D. Moreno, G. M. A. da Silva, and O. A. Z.Sotomayor, “Blood glucose regulation in patients with type 1diabetesusing model predictive control and data reconciliation,”IEEE LatinAmerica Transactions, vol. 16, no. 12, pp. 2872–2880, 2018.
V. B. Peccin, D. M. Lima, R. C. C. Flesch, and J. E. Normey-Rico, “Fastconstrained generalized predictive control with admm embedded in anfpga,”IEEE Latin America Transactions, vol. 18, no. 02, pp. 422–429,2019.
B. Cao, B. M. Grainger, X. Wang, Y. Zou, G. F. Reed, and Z.-H.Mao, “Direct torque model predictive control of a five-phase permanentmagnet synchronous motor,”IEEE Transactions on Power Electronics,vol. 36, no. 2, pp. 2346–2360, 2020.
X. Yu-Geng, L. De-Wei, and L. Shu, “Model predictive control—statusand challenges,”Acta Automatica Sinica, vol. 39, no. 3, pp. 222–236,2013.
Z. Kovacic and S. Bogdan,Fuzzy controller design: theory and appli-cations. Fort Worth: CRC press, 2006.
G. Hesamian, M. G. Akbari, and R. Yaghoobpoor, “Quality controlprocess based on fuzzy random variables,”IEEE Transactions on FuzzySystems, vol. 27, no. 4, pp. 671–685, 2018.
A. C. K. Ferrari, G. V. Leandro, L. dos Santos Coelho, C. A. G.da Silva, E. G. de Lima, and C. R. Chaves, “Tuning of control parametersof grey wolf optimizer using fuzzy inference,”IEEE Latin AmericaTransactions, vol. 17, no. 07, pp. 1191–1198, 2019.
T. H. Cortés, A. G. Meza, J. R. Valdez, L. A. P. Carranza, R. T. Herrera,and J. A. M. Campaña, “Analysis of controllability, observability andstabilization for a class of systems described by takagi-sugeno fuzzymodels by means of fuzzy pole assignment,”IEEE Latin AmericaTransactions, vol. 17, no. 08, pp. 1382–1389, 2019.
T. Takagi and M. Sugeno, “Fuzzy identification of systemsand itsapplications to modeling and control,” inIEEE Trans. Syst. Man. Cyber.Elsevier, 1985, vol. 15, pp. 116–132.
H. O. Wang, K. Tanaka, and M. F. Griffin, “An approach to fuzzy controlof nonlinear systems: Stability and design issues,”IEEE transactions onfuzzy systems, vol. 4, no. 1, pp. 14–23, 1996.
J. J. Espinosa, M. L. Hadjili, V. Wertz, and J. Vandewalle, “Predictivecontrol using fuzzy models—comparative study,” in1999 EuropeanControl Conference (ECC). IEEE, 1999, pp. 1511–1516.
S. Yeh, D. Ji, W. Yoo, and S. Won, “Efficient fuzzy-mpc for nonlin-ear systems: rule rejection,” in2006 SICE-ICASE International JointConference. IEEE, 2006, pp. 5653–5657.
M. Killian, B. Mayer, A. Schirrer, and M. Kozek, “Cooperative fuzzymodel-predictive control,”IEEE Transactions on Fuzzy Systems, vol. 24,no. 2, pp. 471–482, 2015.
L. Teng, Y. Wang, W. Cai, and H. Li, “Robust model predictive controlof discrete nonlinear systems with time delays and disturbances via t–sfuzzy approach,”Journal of Process Control, vol. 53, pp. 70–79, 2017.
X. Wang, S. Li, S. Su, and T. Tang, “Robust fuzzy predictive controlfor automatic train regulation in high-frequency metro lines,”IEEETransactions on Fuzzy Systems, vol. 27, no. 6, pp. 1295–1308, 2018.
J.-H. Park, T.-H. Kim, and T. Sugie, “Output feedback model predictivecontrol for lpv systems based on quasi-min–max algorithm,”Automatica,vol. 47, no. 9, pp. 2052–2058, 2011.
Z. Wan and M. V. Kothare, “Robust output feedback model predictivecontrol using off-line linear matrix inequalities,”Journal of ProcessControl, vol. 12, no. 7, pp. 763–774, 2002.
X. Tang, L. Deng, N. Liu, S. Yang, and J. Yu, “Observer-basedoutput feedback mpc for t–s fuzzy system with data loss and boundeddisturbance,”IEEE transactions on cybernetics, vol. 49, no. 6, pp. 2119–2132, 2018.
X. Ping and W. Pedrycz, “Output feedback model predictive controlof interval type-2 t–s fuzzy system with bounded disturbance,”IEEETransactions on Fuzzy Systems, vol. 28, no. 1, pp. 148–162, 2019.
G. Feng,Analysis and synthesis of fuzzy control systems: a model-basedapproach. CRC press, 2018, vol. 37.
M. C. Turner, G. Herrmann, and I. Postlethwaite, “Discrete-time anti-windup: Part 1—stability and performance,” in2003 European ControlConference (ECC). IEEE, 2003, pp. 473–478.
S. Bououden, M. Chadli, S. Filali, and A. El Hajjaji, “Fuzzy modelbased multivariable predictive control of a variable speed wind turbine:Lmi approach,”Renewable Energy, vol. 37, no. 1, pp. 434–439, 2012.
R. Baždari ́c, D. Matko, A. Leban, D. Vonˇcina, and I. Škrjanc, “Fuzzymodel predictive control of a dc-dc boost converter based on non-linear model identification,”Mathematical and Computer Modelling ofDynamical Systems, vol. 23, no. 2, pp. 116–134, 2017.
T. B. S. Moreira, R. C. B. Rego, C. S. N. Rios, F. G. Nogueira, andM. V. S. Costa, “Análise comparativa entre controlador gpc-te mpc-lmicom anti-windup lmi aplicado em conversor boost ccte,” in12th Seminaron Power Electronics and Control, Natal, RN, 2019.
M. V. S. Costa, “Controle mpc robusto aplicado ao conversor boostccte otimizado por inequações matriciasi lineares,” Ph.D. dissertation,Universidade Federal do Ceará, Fortaleza, 2017.
R. D. Middlebrook and S. Cuk, “A general unified approachto modellingswitching-converter power stages,” in1976 IEEE Power ElectronicsSpecialists Conference. IEEE, 1976, pp. 18–34.
L.-X. Wang,A course in fuzzy systems and control. Prentice Hall PTRUpper Saddle River, NJ, 1997, vol. 2.