Development of an Embedded Longitudinal Flight Control Based on X-Plane Flight Simulator
Keywords:
Avionics, Embedded Systems, X-Plane, Automatic Flight Control SystemsAbstract
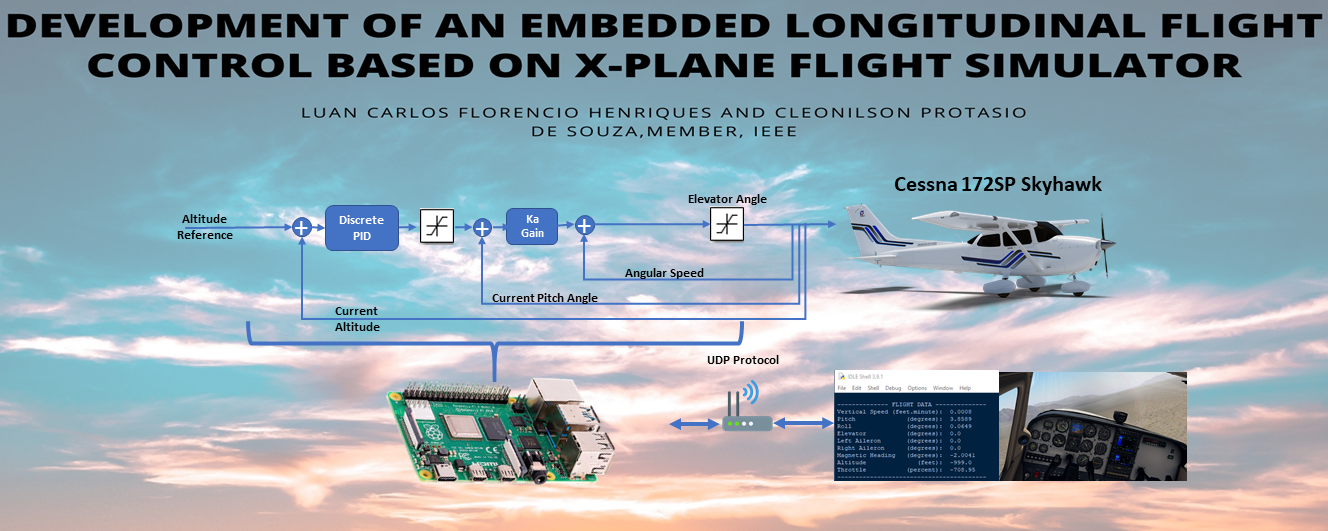
Avionics is a category of electronic systems, equipment and instruments specifically designed for use in aviation. Usually called autopilot, the Automatic Flight Control System, is one of the main systems in avionics. Autopilot systems are designed to automatically control the aircraft piloting, reducing the pilot fatigue caused by the flight. Before being embedded into an aircraft, an autopilot system must be exhaustively evaluated by computational simulations to be validated. The objective of this work is to describe the development of an embedded automatic flight controller aimed to be applied to a Cessna-172SP-Skyhawkmodel aircraft in order to control its altitude. The developed flight controller is based on a tuned PID control and it is embedded in a Raspberry Pi that actually controls the altitude of the aircraft simulated in the X-Plane 11 flight simulator, running on a Desktop PC connected by UDP to the Raspberry Pi. The simulation results validated the proposed flight controller as well as the proposed hardware scheme for validation.
Downloads
References
D. Roskam, Airplane Flight Dynamics and Automatic Flight Controls - Part I and Part II. 3 ed., Lawrence: DARcorporation, 2001.
S. R. B. Santos, “Arquitetura de um piloto automatico longitudinal ”hardware in loop” com o simulador x-plane,” Master’s thesis, Instituto Tecnologico da Aeronáutica, São José dos Campos, 2009.
E. Çetín, “System identification and controle of a fixed wing aircraft by using flight data obtained from x-plane flight simulator,” Master Thesis. Middle East Technical University, Turkey, p. 169, 2018.
M. A. Elsadig and M. A. Elbakri, “Design of autopilot platform using hils approach,” in 2017 International Conference on Communication, Control, Computing and Electronics Engineering (ICCCCEE), pp. 1–6, 2017.
P. C. Jan Vlk, “Metodologia de sintonia pid multi-malha para veículos aéreos não tripulados: dinâmica longitudinal”, Congresso Brasileiro de Automática, 2012.
Rogalski, Tomasz, Nowak, Dariusz, Walek, Lukasz, Rzónca, Dariusz, and Samolej, Slawomir, “Control system for aircraft take-off and landing based on modified pid controllers,” MATEC Web Conf., vol. 252, p. 06008, 2019.
Y. V. P. Kumar, K. M. N. S. Kiran, S. Yugandhar, and K. P. Raju, “Online attitude controlling of longitudinal autopilot for general aviation aircraft using artificial neural networks,” in 2013 Nirma University International Conference on Engineering (NUiCONE), pp. 1–6, 2013.
ICAO/OACI, “The convention on international civil aviation: Annexes 1 to 18.,” Toronto, Canada, 1948. URL = https://www.icao.int/safety/airnavigation/nationalitymarks/annexes booklet_en.pdf.
ICAO/OACI, “Flight controls”, France, 2010. URL = https://www.lavionnaire.fr/VocableFlightControl.php.
J. M. Homa, Conhecimentos Técnicos de Aeronaves e Motores. 32 ed., Sao Paulo: Editora ASA, 2012.
N. S. Saintive, Teoria de voo: Introdução a Aerodinâmica. 7 ed., São Paulo: Editora ASA, 2015.
M. V. Cook, Flight Dynamics Principles. A linear systems approach to
Aircraft Stability and Control. 3 ed., Oxford: Elsevier, 2012.
W. H. Leisher L, Stability derivatives of cessna aircraft. Wichita: Cessna
Aircraft Company, 1957.
C. Kasnakoglu, “Investigation of multi-input multi-output robust control methods to handle parametric uncertainties in autopilot design,” PLOS
ONE, vol. 11, 2016.
R. C. Dorf, Sistema de Controle Modernos. 11 ed, São Paulo: LTC,
A. K. et al, “Flight dynamics, stability and control of a flexible airplane,” 15th International Conference on Aerospace Sciences Aviation Technology., Cairo, 2013.
V. Bernal, “Protocolo udp: “user datagram protocol”, 2016. URL = https://edisciplinas.usp.br/pluginfile.php/4665877/mod resource/content/1/61-Revisao-udp-v5.pdf. Acesso em 10 de março de 2020.