Experimental Verification of the Leader-Follower Formation Control of Two Wheeled Mobile Robots with Obstacle Avoidance
Keywords:
leader- follower formation, experimental verification, obstacle avoidance, Wheeled Mobile Robot, differential configurationAbstract
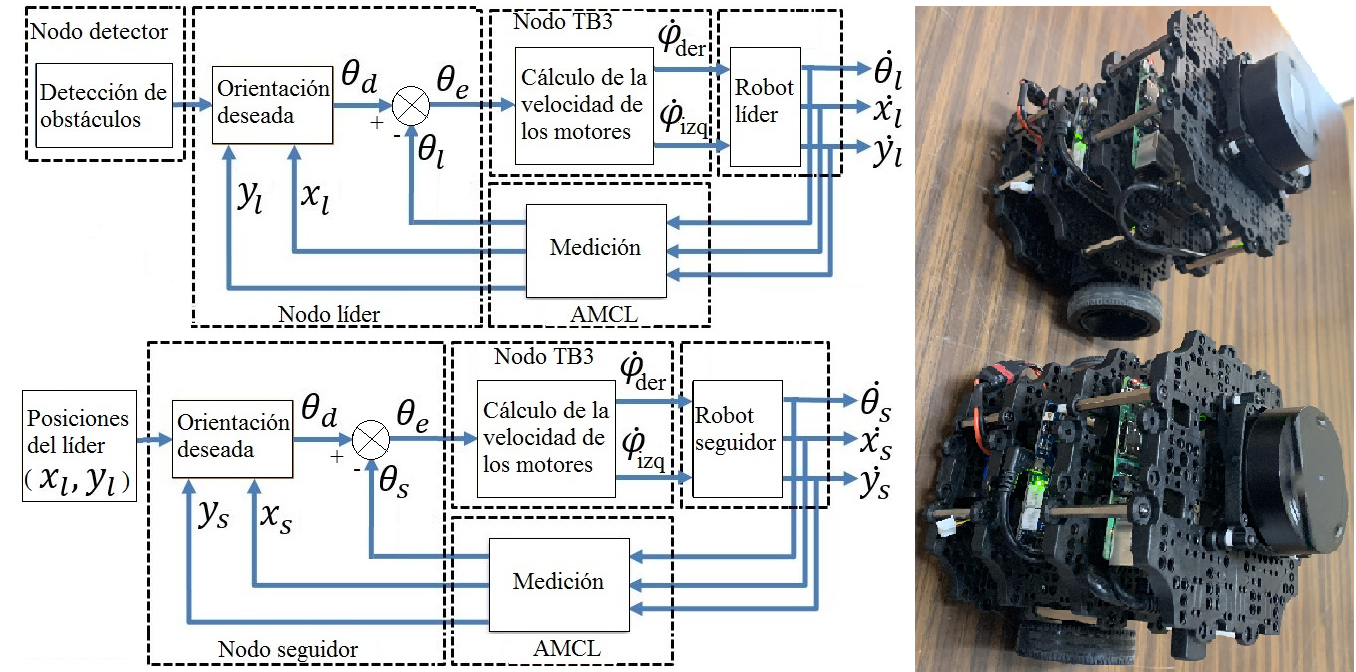
In this work the experimental verification of the control of two wheeled mobile robots with differential configuration under a leader-follower formation is presented, where the leader performs the task of tracking a predefined trajectory, as well as, it is able to avoid obstacles and it sends information of the point-to-point trajectories reached to the follower mobile robot. The follower has the ability to estimate the trajectory of the leader robot only based on the information received from the leader, for arbitrary initial conditions. Experimental verifications with two wheeled mobile robots TurtleBot3 Burger illustrate the performance of the proposed technique, using the robot operating system (ROS) and Python.
Downloads
References
A. Khan, B. Rinner, A. Cavallaro, “Cooperative robots to observe moving targets,” IEEE Transactions on cybernetics, vol. 48, no. 1, pp. 187-198, 2016.
J. W. Wang, Y. Guo, M. Fahad, B. Bingham, “Dynamic plume tracking by cooperative robots,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 2, pp. 609-620, 2019.
E. Roszkowska, P. Dulewicz, L. Janiec, “Hierarchical hybrid control for multiple mobile robot systems,” IFAC-PapersOnLine, vol. 52, no. 8, pp. 452-457, 2019.
V. Digani, M. A. Hsieh, L. Sabattini, C. Secchi, “Coordination of multiple AGVs: a quadratic optimization method,” Autonomous Robots, vol. 43, no. 3, pp. 539-555, 2019.
C. E. Lee, T. K. Sung, “TWR based cooperative localization of multiple mobile robots for search and rescue application,” Journal of Korea Robotics Society, vol. 11, no. 3, pp. 127-132, 2016.
S. D. Pendleton, H. Andersen, X. Du, X. Shen, M. Meghjani, Y. H. Eng, D. Rus, M. H. Ang, “Perception, planning, control, and coordination for autonomous vehicles,” Machines, vol. 5, no. 1, pp. 1-54, 2017.
X. Zhang, M. Li, J. H. Lim, Y. Weng, Y. Tay, H. Pham, Q. C. Pham, “Large-scale 3D printing by a team of mobile robots,” Automation in Construction, vol. 95, pp. 98-106, 2018.
A. G. Barrientos, J. L. Lopez, E. S. Espinoza, J. Hoyo, G. Valencia, “Object transportation using a cooperative mobile multi-robot system,” IEEE Latin America Transactions, vol. 14 no. 3, pp. 1184-1191, 2016.
Z. Peng, S. Yang, G. Wen, A. Rahmani, Y. Yu, “Adaptive distributed formation control for multiple nonholonomic wheeled mobile robots,” Neurocomputing, vol. 173, pp. 1485-1494, 2016.
R. S. Ortigoza, M. M. Aranda, G. S.Ortigoza, V. M. H. Guzm´an, M. A. M. Vilchis, G. S. Gonz´alez, J. C. H. Lozada, M. O. Carbajal, “Wheeled mobile robots: a review,” IEEE Latin America Transactions, vol. 10, no. 6, pp. 2209-2217, 2012.
M. A. Kamel, X. Yu, Y. Zhang, “Fault-tolerant cooperative control design of multiple wheeled mobile robots,” IEEE Transactions on control systems technology, vol. 26, no. 2, pp. 756-764, 2018.
L. Dong, Y. Chen, X. Qu, “Formation control strategy for nonholonomic intelligent vehicles based on virtual structure and consensus approach,” Procedia engineering, vol. 137, pp. 415-424, 2016.
J. Chen, D. Sun, J. Yang, H. Chen, “Leader-follower formation control of multiple non-holonomic mobile robots incorporating a receding-horizon scheme,” The International Journal of Robotics Research, vol. 29, pp. 727-746, 2010.
C. E. Bugarin, A. Y. Aguilar, “Control visual para la formaci´on de robots m´oviles tipo uniciclo bajo el esquema l´ıder- seguidor,” Ingenier´ıa investigaci´on y tecnolog´ıa, vol. 15, pp. 593-602, 2013.
H. Wang, D. Guo, X. Liang, W. Chen, G. Hu, K. K. Leang, “Adaptive vision-based leader-follower formation control of mobile robots,” IEEE Transactions on Industrial Electronics, vol. 64, no. 4, pp. 2893-2902, 2016.
X. Liang, H. Wang, Y. H. Liu, W. Chen, T. Liu, “Formation control of nonholonomic mobile robots without position and velocity measurements," IEEE Transactions on Robotics, 34(2), 434-446.
C. M. Soria, R. Carelli, R. Kelly, J. M. Ibarra-Zannatha, “Coordinated control of mobile robots based on artificial vision,” International Journal of Computers Communications & Control, vol. 1, no. 2, pp. 85-94, 2006.
L. Consolini, F. Morbidi, D. Prattichizzo, M. Tosques, “Leader–follower formation control of nonholonomic mobile robots with input constraints,” Automatica, vol. 44, pp. 1343-1349, 2008.
A. Loria, J. Dasdemir, N. Alvarez Jarquin, “Leader–Follower Formation and Tracking Control of Mobile Robots Along Straight Paths,” IEEE Transactions on Control Systems Technology, vol. 24, pp. 727-732, 2016.
F. Rubio, F. Valero, C. Llopis-Albert, “A review of mobile robots: Concepts, methods, theoretical framework, and applications,” International Journal of Advanced Robotic Systems, vol. 16, no. 2, 2019, Art. no. 1729881419839596.
H. Omrane, M. S. Masmoudi, M. Masmoudi, “Fuzzy logic based control for autonomous mobile robot navigation,” Computational intelligence and neuroscience, vol. 2016, 2016, Art. no. 9548482.
J. Van den Berg, S. J. Guy, M. Lin, D. Manocha, “Reciprocal n-Body Collision Avoidance,” in C. Pradalier, R. Siegwart, G. Hirzinger (eds), Robotics Research, Springer Tracts in Advanced Robotics, vol. 70, Berlin, Heidelberg: Springer, 2011, pp. 3-19.
I. Karamouzas, B. Skinner, S. Guy, “Universal power law governing pedestrian interactions,” Physical review letters, vol. 113, no. 23, 2014, Art. no. 238701.
Y. J. Lee, Z. Bien, “Path planning for a quadruped robot: an artificial field approach,” Advanced Robotics, vol. 16, no. 7, pp. 609-627, 2002.
F. Bayat, S. Najafinia, M. Aliyari, “Mobile robots path planning: electrostatic potential field approach,” Expert Systems with Applications, vol. 100, pp. 68-78, 2018.
S. M. Rostami, A. K. Sangaiah, J. Wang, X. Liu, “Obstacle avoidance of mobile robots using modified artificial potential field algorithm,” EURASIP Journal on Wireless Communications and Networking, vol. 1, no. 70, pp. 1-19, 2019, https://doi.org/10.1186/s13638-019-1396-2
M. Pasha, R.A. Riaz, N. Javaid, M. Ilahi, R.D. Khan, “Control strategies for mobile robot with obstacle avoidance,” Journal of Basic and Applied Scientific Research vol. 3, no. 4, pp. 1027-1036, 2013.
J. Oroko, G. N. Nyakoe, “Obstacle avoidance and path planning schemes for autonomous navigation of a mobile robot: a review,” in Proceedings of the 2012 Mechanical Engineering Conference on Sustainable Research and Innovation, 2014, pp. 314-318.
G. Sahin, M. Balcilar, E. Uslu, S. Yavuz, M. F. Amasyali, “Obstacle avoidance with Vector Field Histogram algorithm for search and rescue robots,” in 22nd Signal Processing and Communications Applications Conference (SIU), Trabzon, 2014, pp. 766-769, doi:10.1109/SIU.2014.6830342.
A. Babinec, M. Dekan, F. Duchon, A. Vitko, “Modifications of VFH navigation methods for mobile robots,” Procedia Engineering, vol. 48, pp. 10-14, 2012.
I. Ulrich and J. Borenstein, “VFH/sup */: local obstacle avoidance with look-ahead verification,” Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 2000, pp. 2505-2511 vol.3, doi: 10.1109/ROBOT.2000.846405.
A. Koubaa, Robot Operating System (ROS): The complete reference (volume 4). Studies in Computational Intelligence 831, Springer, 2019.
D. Fox, S. Thrun, W. Burgard, F. Dellaert, “Particle filters for mobile robot localization,” in Sequential Monte Carlo methods in practice, New York, NY, USA: Springer, 2001, pp. 401-428.
R. Siegwart, I. R. Nourbakhsh, D. Scaramuzza, Introduction to autonomous mobile robots. MIT press, 2011.