Optimization of a Passive Parallelogram Suspension System for a Planetary Rover Using Differential Evolution
Keywords:
Optimization method, Planetary rover, quasistatic analysis, evolutionary algorithmAbstract
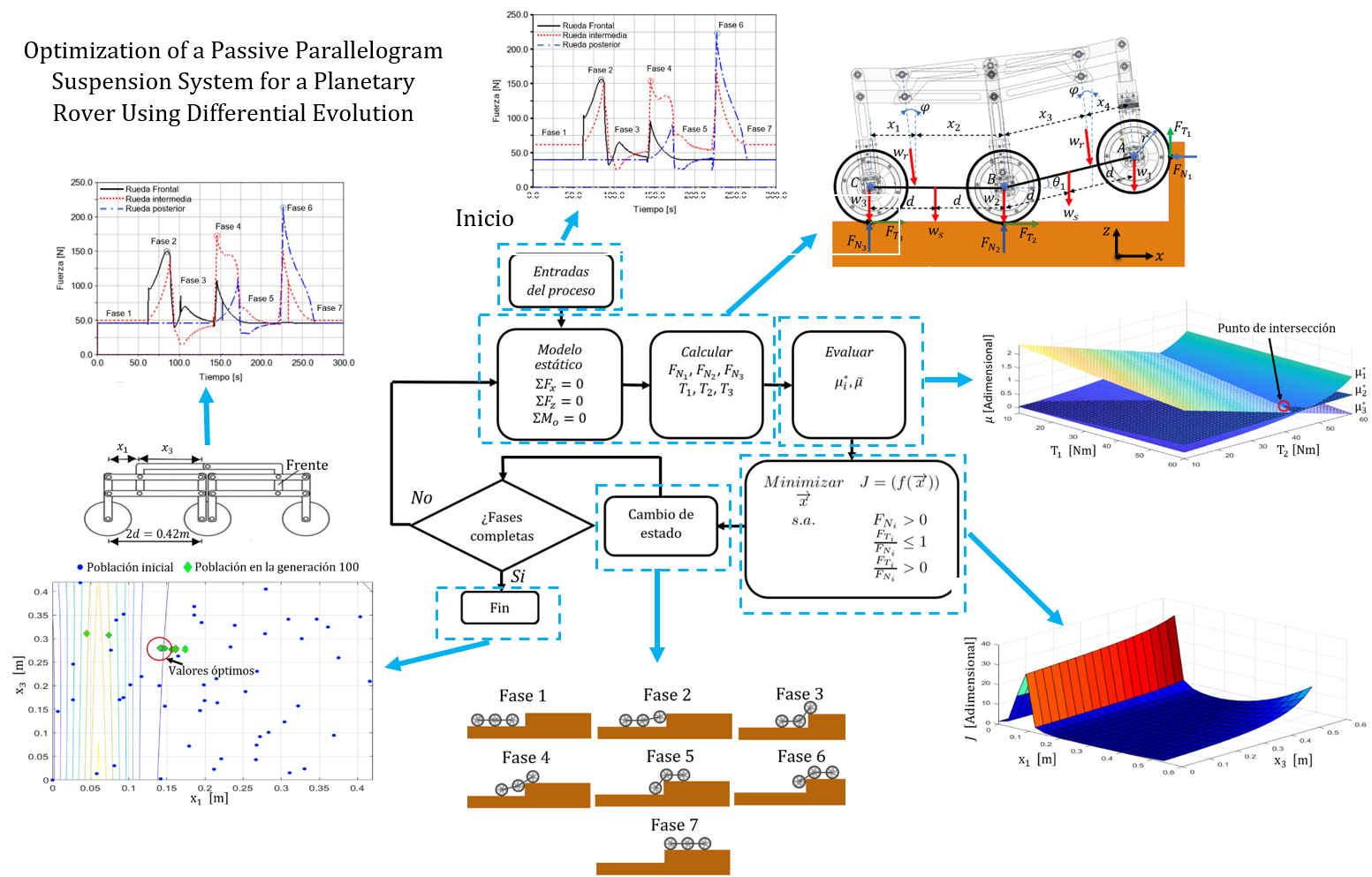
This work presents the optimization process of a passive suspension system for a rover mobile robot. It is based on the development of a quasi-static analysis, where the value of the normal forces and torques of the wheels that allow the system to be in equilibrium in different positions is calculated using a bidimensional static model and the friction required metric. To minimize the metric, the differential evolution algorithm is used to find kinematic parameters of the mechanism. The optimized parameters are tested in three different terrains using multibody simulation. Results confirmed that modifying the kinematic parameters to alter the normal force distribution reduce the friction available at the wheel–terrain interfaces required to overcome the obstacles, thus improving rover mobility.
Downloads