
Nonlinear Control System with Reinforcement Learning and Neural Networks Based Lyapunov Functions
Keywords:
Lyapunov function, Neural Network, Reinforcement Learning, Intelligent controlAbstract
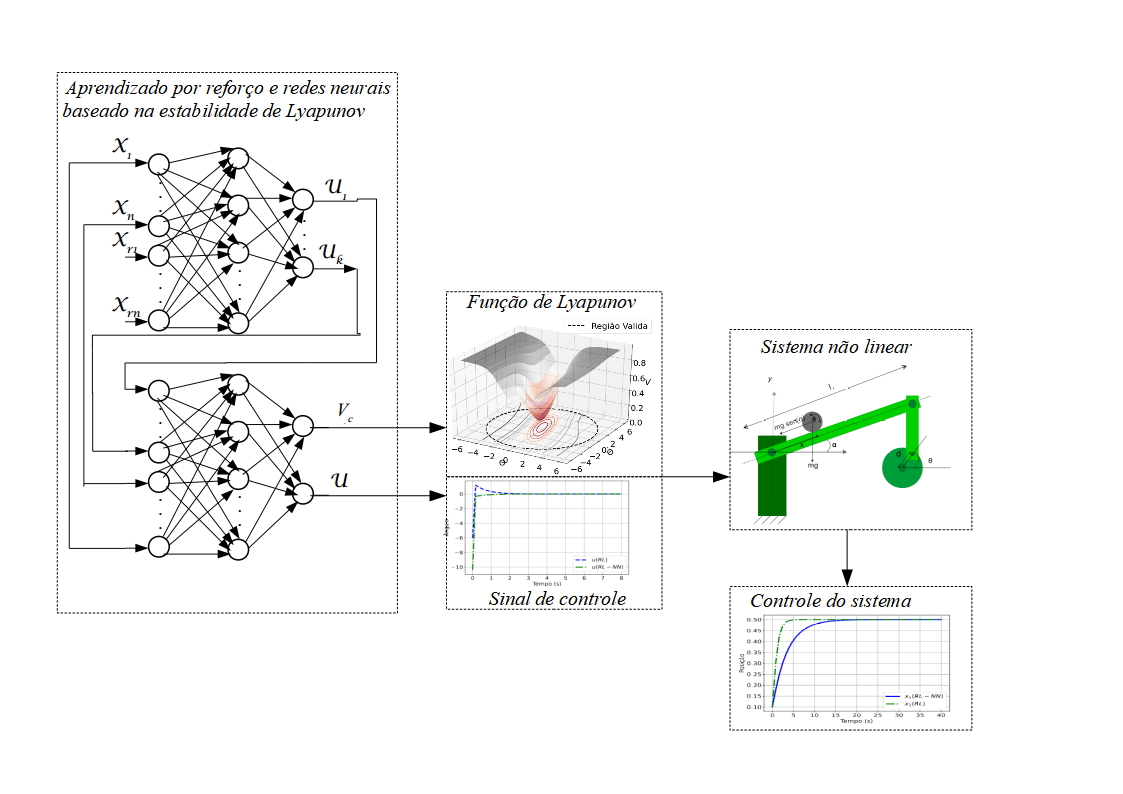
This paper deals with the problem of finding the control Lyapunov function that keeps the system stable. To find the Lyapunov function, this paper proposes the use of reinforcement learning with two neural networks based on the Lyapunov stability theory. The proposed control is applied in two nonlinear systems. The simulations show the good performance of the proposed technique and proved that reinforcement learning and neural networks are an excellent mathematical tool to deal with control design problems.
Downloads
Download data is not yet available.
Downloads
Published
2021-03-19
How to Cite
Rego, R. C. B., & Araújo, F. M. U. de. (2021). Nonlinear Control System with Reinforcement Learning and Neural Networks Based Lyapunov Functions. IEEE Latin America Transactions, 19(8), 1253–1260. Retrieved from https://latamt.ieeer9.org/index.php/transactions/article/view/4332
Issue
Section
Articles
