Super-twisting Speed Control of a Brushless Direct Current Motor with Back-EMF estimation
Keywords:
Robust Control, disturbance rejection, parameter varying systems, Sliding Mode Controller, nested sliding mode controlAbstract
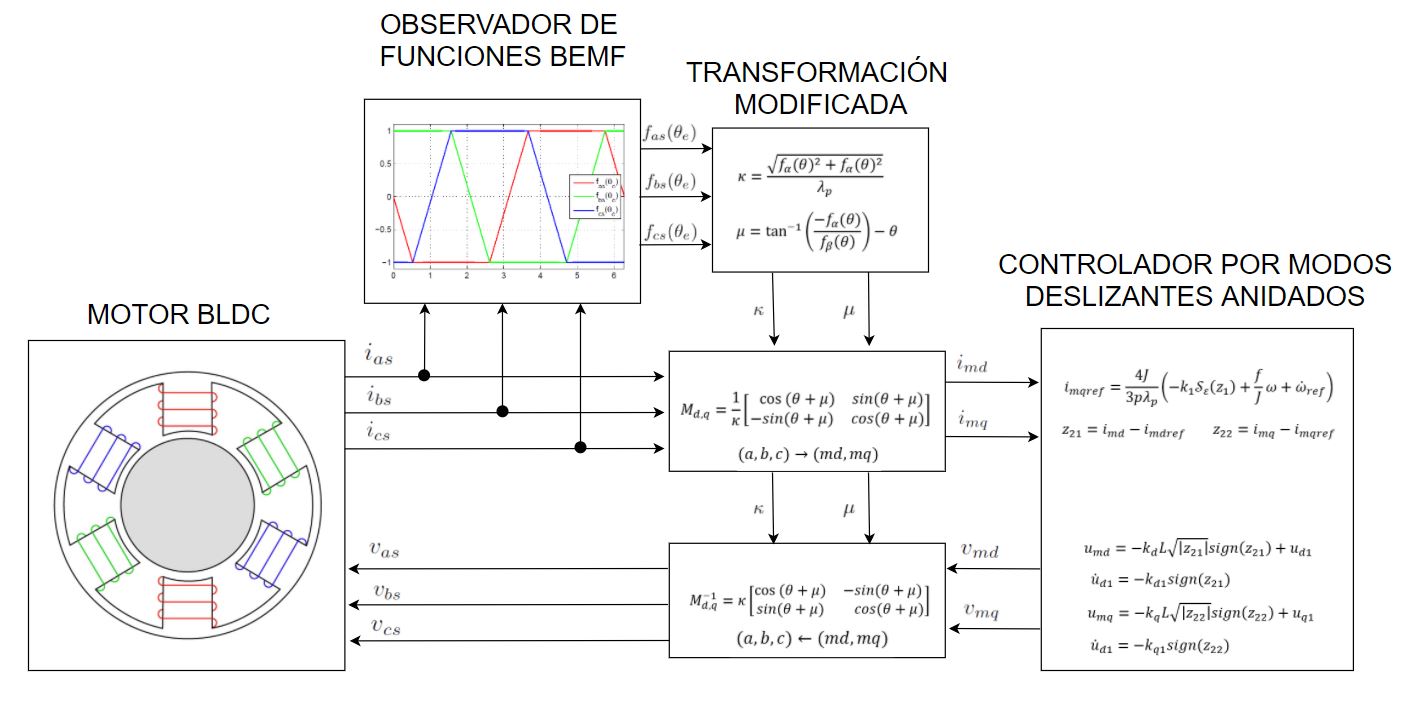
A super-twisting sliding mode controller is developed for speed control of a brushless direct current motor using a nested scheme. The non-sinusoidal nature of the back electromotive forces in this electrical machine presents the need of a modification to Park transformation for accurate field orientation. An extension to Park transformation is used in this work that requires information from the back electromotive forces to compensate position and magnitud variations resulting from the transformation. To obtain the information needed in the modified transformation, a sliding mode observer is designed to estimate the back electromotive forces from the motor. To improve the performance of the controller, a nested sliding mode algorithm is implemented that allows robustness to unmatched perturbations such as load torque variations. Simulations are used to show the performance of the controller under similar real-time conditions with parametric and load torque variations.
Downloads