Anti-balance Load Control System Applied to an Overhead Crane Prototype Activated by Voice Commands
Keywords:
Artificial Neural Networks, fuzzy control, mel-frequency cepstral coefficients, voice commandsAbstract
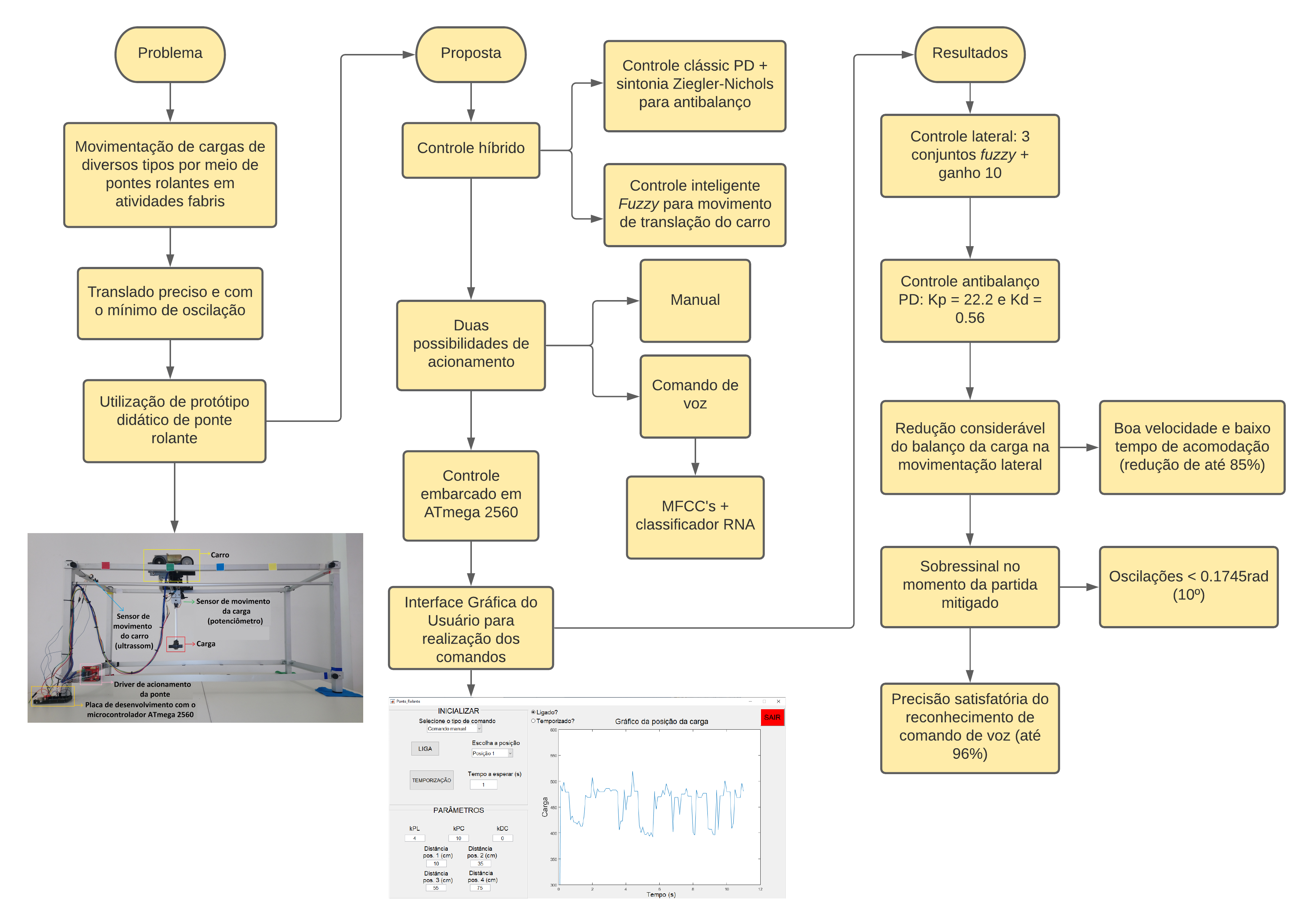
This paper presents a proposal of anti-balance control applied to a didactic overhead crane, with the possibility of its activation by voice commands through a Graphical User Interface. It was opted for the application of fuzzy intelligent control for the load anti-balance and Proportional-Derivative (PD) classic control with Ziegler-Nichols (ZN) tuning for the car sidelong movement. The whole control is embedded in an ATmega 2560 microcontroller, responsible for commuting between the two forms of control, as well as accomplish the communication with the interface. Moreover, it was used the Mel-Frequency Cepstral Coefficients for the characterization of the voice signals and a Multilayer Perceptron artificial neural network for the classification of the extracted coefficients. After the accomplishment of the car movement tests and load balance analysis, it was verified that the fuzzy controller for the sidelong movement allied to the ZN tuning for the anti-balance PD control and the speech commands recognition by artificial neural network were effective for the studied application.
Downloads
References
S. Mandal, K. Singh, R. K. Behera, S. K. Sahu, N. Raj, and J. Maiti, “Human error identification and risk prioritization in overhead crane operations using HTA, SHERPA and fuzzy VIKOR method,” Expert Syst. Appl., vol. 42, no. 20, pp. 7195–7206, 2015.
A. A. Marquez, P. Venturino, and J. L. Otegui, “Common root causes in recent failures of cranes,” Eng. Fail. Anal., vol. 39, pp. 55–64, 2014.
R. L. Baiôco, “Sistema anti-balanço para transporte de cargas em pontes rolantes,” B.S. final paper, Dept. Elec. Eng., Inst. Fed. do Espírito Santo, Vitória, ES, Brazil, 2012.
Y. Zhai, M. C. Li, J. Luo, Y. Zhou, and L. Liu, “Research of the motion balance of spherical mobile robot based on fuzzy control,” J. Vibroengineering, vol. 17, no. 1, pp. 13–23, 2015.
A. A. Assis, “Desenvolvimento de um sistema de controle difuso anti-balanço para um modelo didático de ponte rolante,” B.S. final paper, Dept. Elec. Eng., Inst. Fed. do Espírito Santo, Vitória, ES, Brazil, 2015.
Y. Zhao and H. Gao, “Fuzzy-Model-Based Control of an Overhead Crane With Input Delay and Actuator Saturation,” IEEE Trans. Fuzzy Syst., vol. 20, no. 1, pp. 181–186, 2012.
W. Yu, M. A. Moreno-Armendariz, and F. O. Rodriguez, “Stable adaptive compensation with fuzzy CMAC for an overhead crane,” Inf. Sci. (Ny)., vol. 181, no. 21, pp. 4895–4907, 2011.
C. Rosales, S. Tosetti, C. Soria, and F. Rossomando, “Neural Adaptive PID Control of a Quadrotor using EFK,” IEEE Lat. Am. Trans., vol. 16, no. 11, pp. 2722–2730, 2018.
K. Ogata, Modern Control Engineering, 4th ed. Upper Saddle River, NJ, USA: Prentice Hall PTR, 2001.
D. Hernandez de la Iglesia, G. Villarubia Gonzalez, J. F. De Paz Santana, and J. Bajo Perez, “Design and implementation of a low-cost Universal Control for intelligent electric wheelchairs,” IEEE Lat. Am. Trans., vol. 16, no. 5, pp. 1328–1336, 2018.
B. Villeda Félix, J. H. Arroyo Nuñez, and R. S. Nuñez Cruz, “Displacement aid system for people with visual impairment using magnetic coils,” IEEE Lat. Am. Trans., vol. 18, no. 02, pp. 400–406, 2020.
D. Kridi, A. J. Alves, M. Lemos, and R. de A. L. Rabêlo, “Desenvolvimento de Uma Biblioteca Fuzzy para o Controle Autônomo de Um Robô Móvel em Ambiente Desconhecido,” in 1a Mostra Nacional de Robótica, At Universidade Federal de São João Del-Rei (UFSJ) - MG, 2011, pp. 155–161.
J. G. Ziegler and N. B. Nichols, “Optimum Settings for Automatic Controllers,” J. Dyn. Syst. Meas. Control, vol. 115, no. 2B, pp. 220–222, Jun. 1993.
E. R. de S. Thiago, “Reconhecimento de Voz utilizando extração de Coeficientes Mel-Cepstrais e Redes Neurais Artificiais,” B.S. final paper, Dept. Telecom. Eng., Inst. Fed. de Santa Catarina, São José, SC, 2017.
C. J. Siddhant and A. N. Cheeran, “MATLAB Based Feature Extraction Using Mel Frequency Cepstrum Coefficients for Automatic Speech Recognition,” Int. J. Sci. Eng. Technol. Res., vol. 3, no. 6, pp. 1820–1823, 2014.
M. Yuan, “Speech Recognition on DSP : Algorithm Optimization and Performance Analysis,” M.S. thesis, Dept. Electron. Eng., Chinese Univ. of Honk Kong, Honk Kong, China, 2004.
L. R. Rabiner and B. W. Juang, Fundamentals of Speech Recognition, 1st ed. Englewood Cliffs, NJ, USA: Prentice Hall, 1993.
B. P. Bogert, J. R. Healy, and J. W. Tukey, “The Quefrency Analysis of Time Series for Echoes: Cepstrum, Pseudo-Autocovariance, Cross-Cepstrum, and Saphe Cracking,” in Proceedings of the Symposium on Time Series Analysis, 1963, pp. 209–243.
P. Taylor, Text-to-Speech Synthesis, 1st ed. NY, USA: Cambridge University Press, 2009.
W. Gevaert, G. Tsenov, V. Mladenov, and S. Member, “Neural networks used for speech recognition,” J. Autom. Control, no. 20, pp. 1–7, 2010.
R. H. Hecht-Nielsen, “Kolmogorov’s Mapping Neural Network Existence Theorem,” in Proceedings of the IEEE First International Conference on Neural Networks, 1987, vol. 3, pp. 11–13.
C. Medina, S. Velazco, and J. Salinas, “Experimental control of simple pendulum model,” Sci. Educ., vol. I, no. 1992, pp. 67–76, 2005.