Driving Mobile Robots using a Deep LSTM Architecture: An Experimental Approach
Keywords:
LSTM, Mobile Robots, Deep LearningAbstract
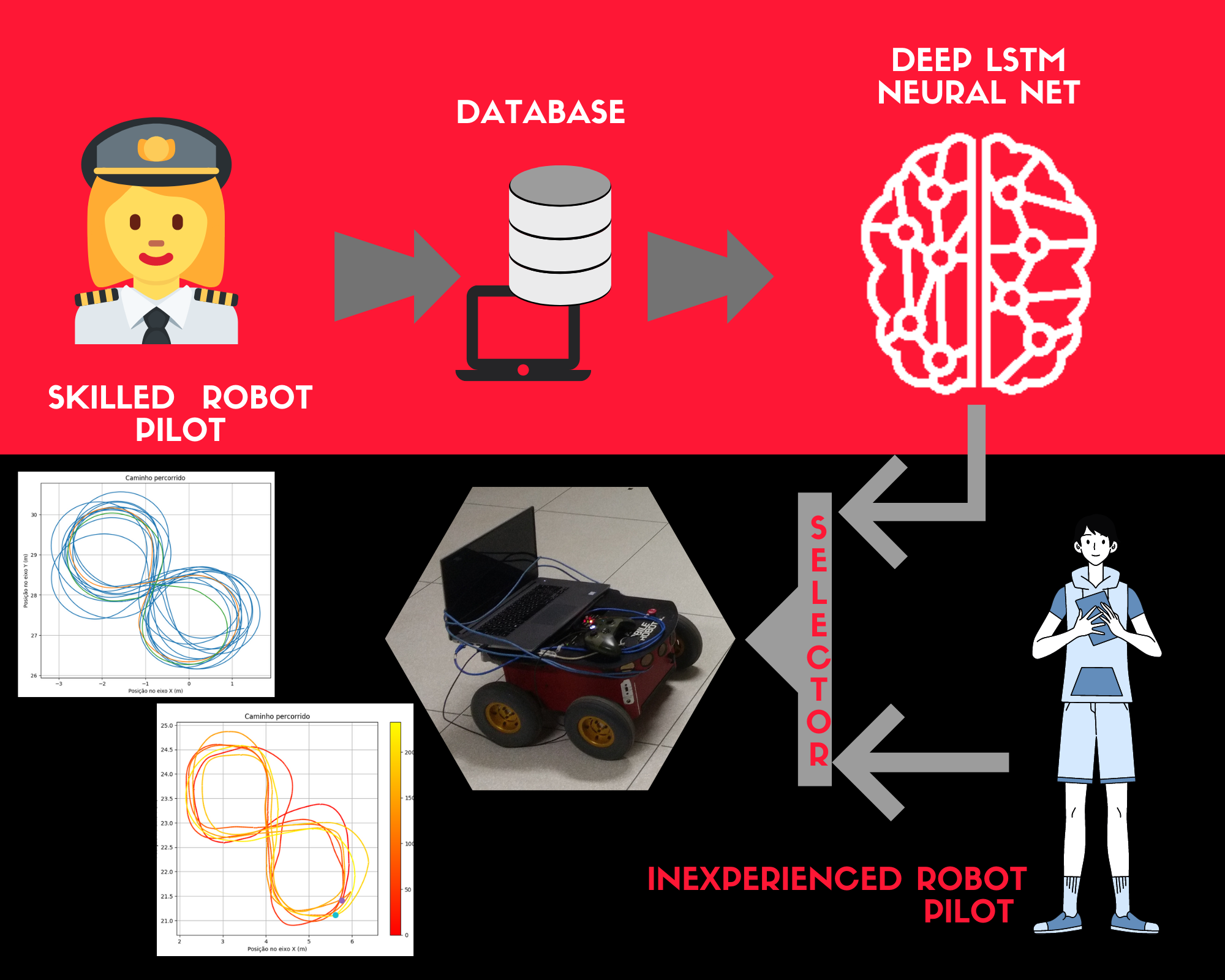
Driving a mobile robot consists in moving the robot to its goal position quickly, without colliding with obstacles, and with no deviations from the planned path. This process requires a skilled pilot, with expertise and well trained. Among the various techniques available to help pilots to drive mobile robots, many of them are based on automatic learning approaches, as deep learning. This work presents the proposal of a new approaching for applications using a deep Long-Short Term Memory (LSTM) architecture, to assist the driving activities in mobile robots, using data extracted from an expert pilot as the main source of learning data. The main contributions of this proposal are i) a new application of the architecture for deep LSTM; ii) a new information data fusion strategy in the guidance command stage; and iii) a large number of tests in scenarios using a real mobile robot.
Downloads