Robotic Knee Exoskeleton Prototype to Assist Patients in Gait Rehabilitation
Keywords:
knee exoskeleton, emg signal processing, motion intention detection, rectus femoris, gait rehabilitation, Artificial Neural Network, remote supervisionAbstract
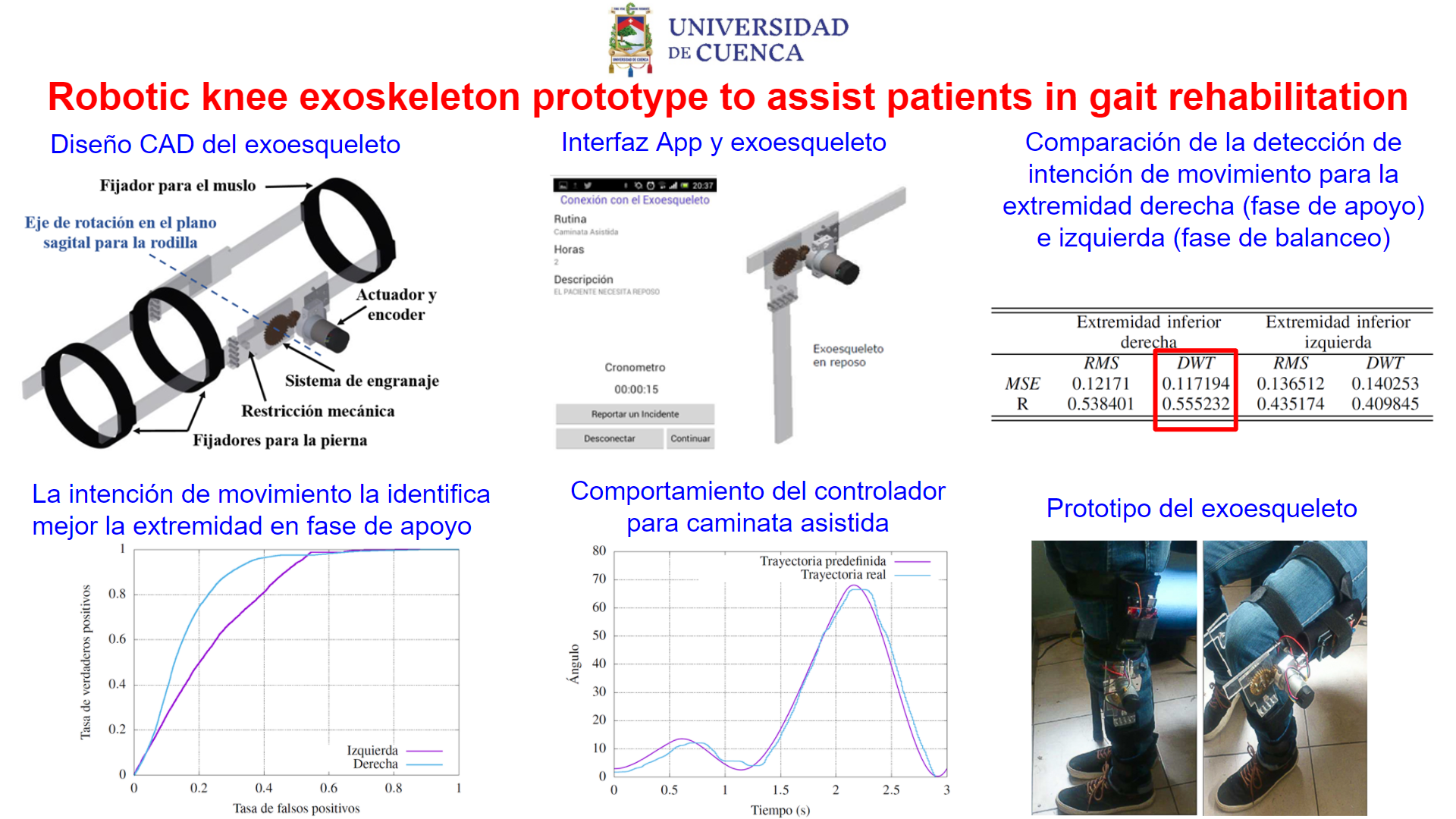
This paper presents the design and development of a low cost robotic knee exoskeleton with mobile interface for active assistance of gait rehabilitation of patients who suffer lower limb impairment. Interaction based on electromyography (EMG) is used for detecting motion intention to recognize muscular activity patterns by applying artificial neural network (ANN) algorithms. A comparison of muscular activity between the rectus femoris of each lower limb is made in order to find which offers better results. Once the system identifies a motion intention, it generates a predefined trajectory that mimics the gait cycle pattern of the knee joint. The actuator of the exoskeleton is required to accomplish this movement based on a position control strategy. The exoskeleton’s operation is supervised remotely through a mobile device, which is connected to a database that contains three rehabilitation routines previously set by medical staff. The robotic knee prototype is validated by monitoring its performance while being used, initially by healthy subjects.
Downloads
References
S. F. dos Reis Alves, A. J. Uribe-Quevedo, I. N. da Silva, and H. Ferasoli Filho, “Pomodoro, a mobile robot platform for hand motion exercising,” in Biomedical Robotics and Biomechatronics (2014 5th IEEE RAS & EMBS International Conference on. IEEE, 2014, pp. 970–974.
J. Li, G. Chen, P. Thangavel, H. Yu, N. Thakor, A. Bezerianos, and Y. Sun, “A robotic knee exoskeleton for walking assistance and connectivity topology exploration in eeg signal,” in Biomedical Robotics and Biomechatronics (BioRob), 2016 6th IEEE International Conference on. IEEE, 2016, pp. 1068–1073.
S. Oh, E. Baek, S.-k. Song, S. Mohammed, D. Jeon, and K. Kong, “A generalized control framework of assistive controllers and its application to lower limb exoskeletons,” Robotics and Autonomous Systems, vol. 73, pp. 68–77, 2015.
Y. Ren and D. Zhang, “Fexo knee: A rehabilitation device for knee joint combining functional electrical stimulation with a compliant exoskeleton,” in Biomedical Robotics and Biomechatronics (2014 5th IEEE RAS & EMBS International Conference on. IEEE, 2014, pp. 683–688.
P. F´elix, J. Figueiredo, C. P. Santos, and J. C. Moreno, “Electronic design and validation of powered knee orthosis system embedded with wearable sensors,” in Autonomous Robot Systems and Competitions (ICARSC), 2017 IEEE International Conference on. IEEE, 2017, pp. 110–115.
P. A. G´omez, M. D. Rodr´ıguez, and V. Amela, “Dise˜no de dispositivo rob´otico para la rehabilitaci´on y diagnosis de extremidades inferiores,” 2017.
J. J. Craig, Introduction to robotics: mechanics and control. Pearson Prentice Hall Upper Saddle River, 2005, vol. 3.
H. Aguilar-Sierra, W. Yu, S. Salazar, and R. Lopez, “Design and control of hybrid actuation lower limb exoskeleton,” Advances in Mechanical Engineering, vol. 7, no. 6, 2015.
L. I. Minchala, F. Astudillo-Salinas, K. Palacio-Baus, and A. Vazquez-Rodas, “Mechatronic design of a lower limb exoskeleton,” in Design, Control and Applications of Mechatronic Systems in Engineering. InTech, 2017.
J. P. Loja Duchi and A. S. Ord´o˜nez Torres, “Dise˜no y construcci´on de un exoesqueleto de rodilla rob´otica para asistir a pacientes en etapas de rehabilitaci´on,” B.S. thesis, 2016.
C. C. Yang and D. A. Dennis, “Mobile-bearing total knee arthroplasty: Technique and clinical results,” Basics in Hip and Knee Arthroplasty-E-book, p. 280, 2015.
A. Rojas, A. Farfan, M. Ayavaca, V. Cardenas, E. Mora, S. Wong, and L. I. Minchala, “Single-channel electromyography based on arduino for analysis of the swing phase in normal gait,” in 2018 IEEE XXV International Conference on Electronics, Electrical Engineering and Computing (INTERCON). IEEE, 2018, pp. 1–4.
N. Nazmi, M. A. Abdul Rahman, S.-I. Yamamoto, S. A. Ahmad, H. Zamzuri, and S. A. Mazlan, “A review of classification techniques of emg signals during isotonic and isometric contractions,” Sensors, vol. 16, no. 8, p. 1304, 2016.
Y.-L. Wang, A. W. Su, T.-Y. Han, C.-L. Lin, and L.-C. Hsu, “Emg based rehabilitation systems-approaches for als patients in different stages,” in Multimedia and Expo (ICME), 2015 IEEE International Conference on. IEEE, 2015, pp. 1–6.
S. Pasinetti, M. Lancini, I. Bodini, and F. Docchio, “A novel algorithm for emg signal processing and muscle timing measurement,” IEEE Transactions on Instrumentation and Measurement, vol. 64, no. 11, pp. 2995–3004, 2015.
Z. A. Wright, W. Z. Rymer, and M. W. Slutzky, “Reducing abnormal muscle coactivation after stroke using a myoelectric-computer interface: a pilot study,” Neurorehabilitation and neural repair, vol. 28, no. 5, pp. 443–451, 2014.
L. R. Altimari, J. L. Dantas, M. Bigliassi, T. F. D. Kanthack, A. C. de Moraes, and T. Abr˜ao, “Influence of different strategies of treatment muscle contraction and relaxation phases on emg signal processing and analysis during cyclic exercise,” in Computational Intelligence in Electromyography Analysis-A Perspective on Current Applications and Future Challenges. InTech, 2012.
A. Phinyomark, C. Limsakul, and P. Phukpattaranont, “Application of wavelet analysis in emg feature extraction for pattern classification,” Measurement Science Review, vol. 11, no. 2, pp. 45–52, 2011.
D. Bai, C. Xia, J. Yang, S. Zhang, Y. Jiang, and H. Yokoi, “Shoulder joint control method for smart prosthetic arm based on surface emg recognition,” in Information and Automation (ICIA), IEEE Int. Conference on. IEEE, 2016, pp. 1267–1272.
G. Morantes, G. Fern´andez, and M. Altuve, “A threshold-based approach for muscle contraction detection from surface emg signals,” in IX International Seminar on Medical Information Processing and Analysis. International Society for Optics and Photonics, 2013, pp. 89 220C.
R. T. Gulshan and M. Singh, “Analysis of emg signals based on wavelet transform–a review.”
R. H. Chowdhury, M. B. Reaz, M. A. B. M. Ali, A. A. Bakar, K. Chellappan, and T. G. Chang, “Surface electromyography signal processing and classification techniques,” Sensors, vol. 13, no. 9, pp. 12 431–12 466, 2013.
O. Wahyunggoro, H. A. Nugroho et al., “Dwt analysis of semg for muscle fatigue assessment of dynamic motion flexion-extension of elbow joint,” in Information Technology and Electrical Engineering (ICITEE), 2016 8th International Conference on. IEEE, 2016, pp. 1–6.
M. Hakonen, H. Piitulainen, and A. Visala, “Current state of digital signal processing in myoelectric interfaces and related applications,” Biomedical Signal Processing and Control, vol. 18, pp. 334–359, 2015.
A. Rojas, A. Farfan, E. Mora, L. I. Minchala, and S. Wong, “Assessing the snr influence in the estimation of the mean frequency of lower limbs semg signals,” IEEE Latin America Transactions, vol. 16, no. 8, pp. 2108–2114, 2018.
G. Wu, C. Wang, X. Wu, Z. Wang, Y. Ma, and T. Zhang, “Gait phase prediction for lower limb exoskeleton robots,” in Information and Automation (ICIA), 2016 IEEE International Conference on. IEEE, 2016, pp. 19–24.
P.-A. Willems, B. Schepens, and C. Detrembleur, “Marcha normal,” EMC-Kinesiterapia-Medicina F´ısica, vol. 33, no. 2, pp. 1–29, 2012.
C.-Y. Ko, J. Ko, H. J. Kim, and D. Lim, “New wearable exoskeleton for gait rehabilitation assistance integrated with mobility system,” International Journal of Precision Engineering and Manufacturing, vol. 17, no. 7, pp. 957–964, 2016.
R. F. da Silva, R. Filgueira, E. Deelman, E. Pairo-Castineira, I. M. Overton, and M. P. Atkinson, “Using simple pid controllers to prevent and mitigate faults in scientific workflows.” in WORKS@ SC, 2016, pp. 15–24.