Improvement of Linear Algebra Controllers using Sliding Surface Concepts: Applications to Chemical Processes
Keywords:
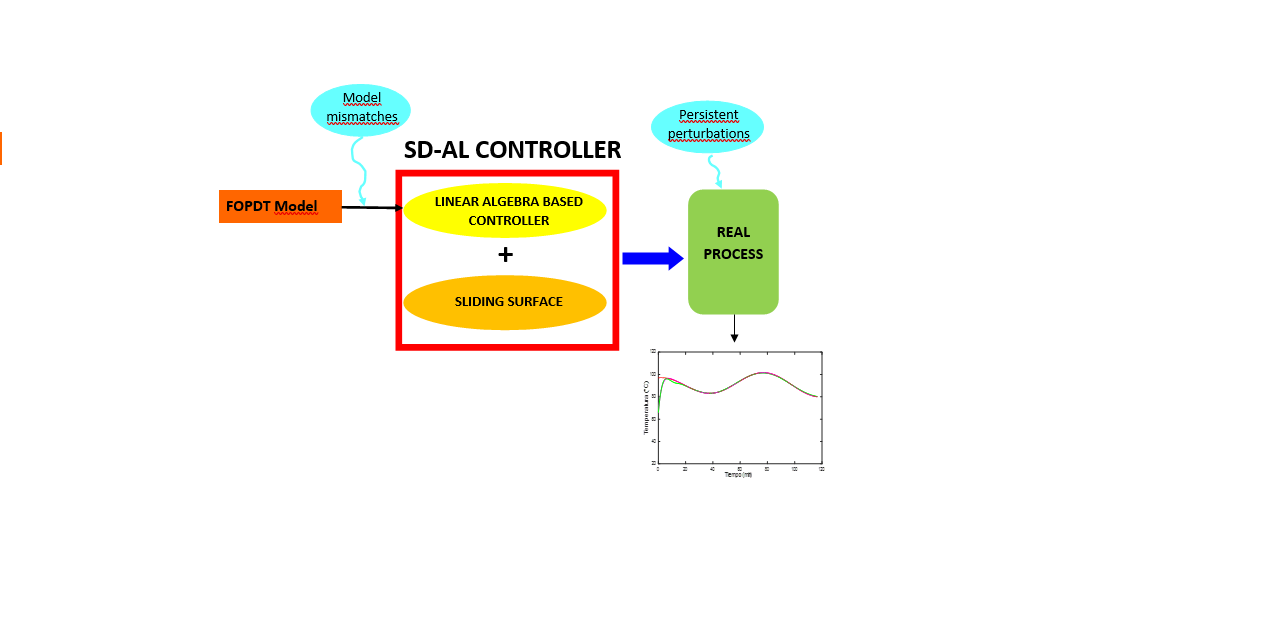
FOPDT model, linear algebra, sliding surface, uncertaintyAbstract
This work presents a novel control technique that combines concepts of Sliding Surface with a Linear Algebra methodology for controller design. The result is a controller with an improved robustness, while the chattering effect attributed to great uncertainties is avoided. A First Order Plus Dead Time (FOPDT) model of the process is used to develop a controller based on Linear Algebra and the concept of sliding surface is used to improve its performance under uncertainties. An interesting feature of this new controller is its ability to follow variable references without overshoot, a highly desirable characteristic for most process systems, and avoids the chattering problem. Results of the control of a CSTR and a laboratory batch reactor using this novel technique are presented. Simulated and experimental results demonstrate the outstanding performance of this new control algorithm.
Downloads